STM32 RS485通信应用
前言:本工程代码在STM32F407ZET6开发板上测试通过。
1. RS485基础知识
a. 485接口
485(一般称作RS485/EIA-485)是隶属于OSI模型物理层的电气特性规定为2线,半双工,多点通信的标准。它的电气特性和RS-232大不一样。用缆线两端的电压差值来表示传递信号。RS485仅仅规定了接受端和发送端的电气特性。它没有规定或推荐任何数据协议。
b. RS485的特点
① 接口电平低,不易损坏芯片。RS485的电气特性:逻辑“1”以两线间的电压差为+(2~6)V 表示;辑“0”以两线间的电压差为-(2~6)V表示。接口信号电平比RS232降低了,不易损坏 接口电路的芯片。
② 传输速率高。10米时,RS485的数据最高传输速率可达35Mbps,在1200m时,传输速度可达100Kbps。
③ 抗干扰能力强。RS485接口是采用平衡驱动器和差分接收器的组合,抗共模干 扰能力增强,即抗噪声干扰性好。
④传输距离远,支持节点多。RS485总线最长可以传输1200m以上(速率≤100Kbps)一般最大支持32个节点,如果使用特制的485芯片,可以达到128个或者256个节点,最大的可以支持到400个节点。
c. RS485的接口原理
RS485推荐使用在点对点网络中,线型,总线型,不能是星型,环型网络。理想情况下RS485需要2个匹配电阻,其阻值要求等于传输电缆的特性阻抗(一般为120Ω)。没有特性阻抗的话,当所有的设备都静止或者没有能量的时候就会产生噪声,而且线移需要双端的电压差。没有终接电阻的话,会使得较快速的发送端产生多个数据信号的边缘,导致数据传输出错。
485推荐的连接方式:
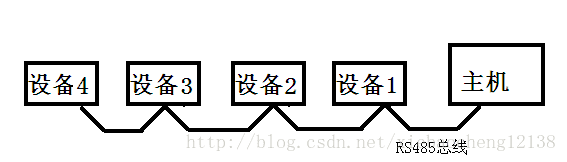
在上面的连接中,如果需要添加匹配电阻,我们一般在总线的起止端加入,也就是主机和设备4上面各加一个120Ω的匹配电阻。
SP3485内部结构图:

图中:
A、B总线接口,用于连接485总线。RO是接收输出端,DI是发送数据收入端,RE是接收使能信号(低电平有效),DE是发送使能信号(高电平有效)。
SP3485硬件连接:

注意:
R55和R56是两个偏置电阻,用来保证总线空闲时,AB之间的电压差都会大约200mV,避免总线空闲时压差不定逻辑混乱。
2. RS485串口编程
a. 编程思路
使用RS485实现两个MCU之间的通信,把接收到的数据通过串口助手显示在超级终端上。首先对Usart1和Usart2进行初始化,Usart1负责与串口助手通信,Usart2与RS485连接进行两个MCU之间的通信。然后编写发送和接收函数,接收函数在Usart2的中断服务函数中实现。最后把接收到的数据和必要的提示信息发送到超级终端上显示。
b. 功能模块代码
①串口初始化
void Uart1_Init(void)
{
//USART1 初始化
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA,ENABLE); //开启GPIOA时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1,ENABLE); //开启USART1时钟
//串口1对应引脚复用映射
GPIO_PinAFConfig(GPIOA,GPIO_PinSource9,GPIO_AF_USART1); //GPIOA9复用为USART1
GPIO_PinAFConfig(GPIOA,GPIO_PinSource10,GPIO_AF_USART1); //GPIOA10复用为USART1
//USART1端口配置
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9 | GPIO_Pin_10; //GPIOA9,GPIOA10
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF; //复用功能
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //速度50MHz
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; //推挽复用输出
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP; //上拉
GPIO_Init(GPIOA,&GPIO_InitStructure); //初始化PA9,PA10
//USART1 端口配置
USART_InitStructure.USART_BaudRate = 115200;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
USART_InitStructure.USART_StopBits = USART_StopBits_1;
USART_InitStructure.USART_Parity = USART_Parity_No;
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;
USART_Init(USART1, &USART_InitStructure);
USART_Cmd(USART1, ENABLE); //使能串口1
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE); //开启相关中断
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
//Usart1 NVIC 配置
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=3;
NVIC_InitStructure.NVIC_IRQChannelSubPriority =3;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
}
void Uart2_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA,ENABLE);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_USART2,ENABLE);
//串口2对应引脚复用映射
GPIO_PinAFConfig(GPIOA,GPIO_PinSource2,GPIO_AF_USART2);
GPIO_PinAFConfig(GPIOA,GPIO_PinSource3,GPIO_AF_USART2);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2 | GPIO_Pin_3;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP;
GPIO_Init(GPIOA,&GPIO_InitStructure);
//USART2 端口配置
USART_InitStructure.USART_BaudRate = 115200;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
USART_InitStructure.USART_StopBits = USART_StopBits_1;
USART_InitStructure.USART_Parity = USART_Parity_No;
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;
USART_Init(USART2, &USART_InitStructure);
USART_Cmd(USART2, ENABLE);
USART_ITConfig(USART2, USART_IT_RXNE, ENABLE);
//Usart2 NVIC 配置
NVIC_InitStructure.NVIC_IRQChannel = USART2_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=3;
NVIC_InitStructure.NVIC_IRQChannelSubPriority =2;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
}②接收数据
void USART2_IRQHandler(void)
{
static u32 rx_i=0;
if(USART_GetITStatus(USART2, USART_IT_RXNE) != RESET)
{
USART_ClearITPendingBit(USART2,USART_IT_RXNE); //清除标志位
rx_buf[rx_i++] = USART_ReceiveData(USART2); //rx_buf是在main.c定义的全局变量
while(USART_GetFlagStatus(USART2, USART_FLAG_TXE) == RESET);
}
rx_flag = 1;
}③RS485初始化
(SP3485的RE,DE引脚与MCU的PG8引脚相连接)
void Rs485_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct;
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOG, ENABLE);
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_8;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_OUT;
GPIO_InitStruct.GPIO_OType = GPIO_OType_PP;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_100MHz;
GPIO_InitStruct.GPIO_PuPd = GPIO_PuPd_UP;
GPIO_Init(GPIOG, &GPIO_InitStruct);
// RS485_TX_EN = 0; //默认为接收模式
}④主函数
int main(void)
{
char *tx_buf = "I believe I can fly!";
u8 len;
Led_Init();
Key_Init();
Systick_Init();
Uart1_Init();
Uart2_Init();
Rs485_Init();
printf("Usart test succeeded!\r\n");
while(1)
{
if(!KEY0) //KEY1按键按下
{
delay_ms(10); //消抖动
if(!KEY0)
{
while(!KEY0);
RS485_TX_EN = 1; //发送模式,RS485_TX_EN是自定义的一个宏,即对PG8进行置位复位
len = strlen(tx_buf);
while(len--)
{
USART_SendData(USART2, *tx_buf++);
while(USART_GetFlagStatus(USART2, USART_FLAG_TXE) == RESET);
}
printf("Send data succeeded!\r\n"); //printf函数已经重定义
}
}
if(!KEY1) //KEY1按键按下
{
delay_ms(10); //消抖动
if(!KEY1) //等待按键松开
{
while(!KEY1);
RS485_TX_EN = 0; //接收模式
if(rx_flag)
{
rx_flag = 0; //清除标志
printf("Receive data: %s\r\n", rx_buf);
}
}
}
}
}c. 工程说明
把程序分别下载到两个MCU后,一方按下发送键后,另一方按下接收键即可接收数据。
效果图


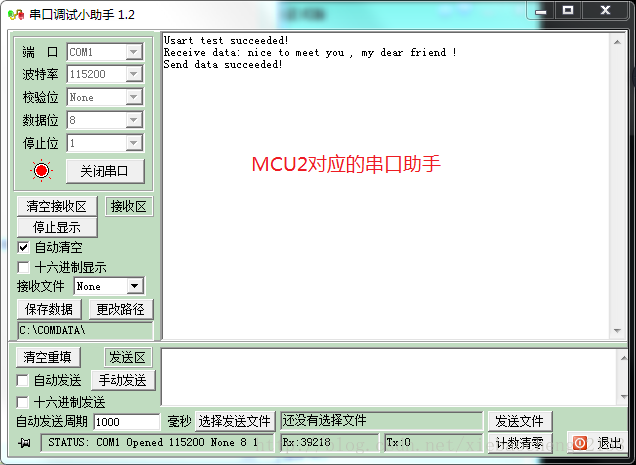
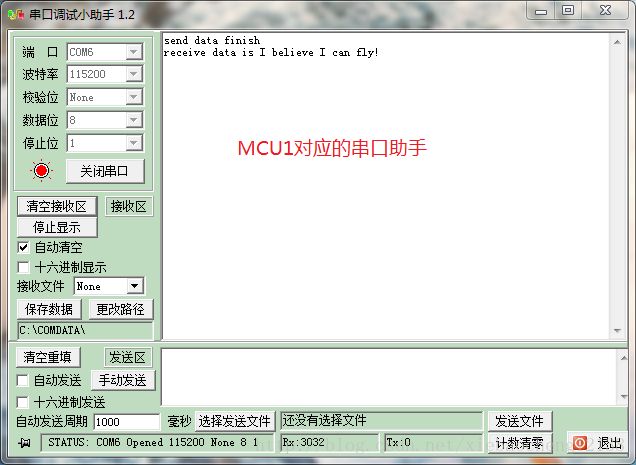
现场调试图

说明:本次调试使用的是两个不同的工程,所以双方发送的数据和提示信息不一样。其实也可以两个MCU用同一个程序,其发送的数据就会一致。
若需要下载本工程完整代码,可以点击一下连接:
http://download.csdn.net/download/xiebaocheng12138/10019199