ROS小车搭建(一)——底层STM32使用
最近在弄ROS小车,做一些分享吧。
由于实验室的需求需要搭建一个智能移动平台,平台是两个轮子的差速运动模型。同时也是比较常见的模型,在创客智造上也有相关的代码和说明。自己也在此基础上做了修改,同时也也有之前实验室的师兄留下的代码,做了一些修改。
1前期准备工作
需要准备的材料:STM32板子(stm32vet6,100引脚)、伺服直流电机以及驱动器、减速器、轮子、串口转USB的线、USB-CAN分析仪,上位机电脑、keil5软件、串口调试助手、USB-CAN监控软件(CAN_TEST)等。
因为相关的机械结构已经制作好了,不需要再多余的安装相关机械设施,主要把重点集中在STM32的调试上。首先需要说一下整体的思路如下图所示:
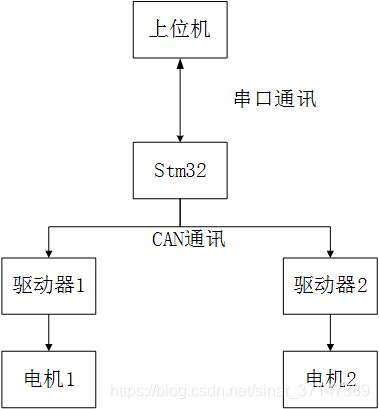
其实原理上是很简单的,就是通过上位机发送通过串口发送指令给STM32,STM32通过检测到串口发送的命令进行分析并通过CAN分配给两个电机一定的速度,同时STM32通过CAN接收到电机的位置反馈信息,经过计算得到里程计信息再经过串口发送给上位机。
-
驱动器电机配置
因为驱动器和伺服电机已经是采购好的,所以需要通过厂家给定的上位机软件对其进行设置即可,具体如下图所示。
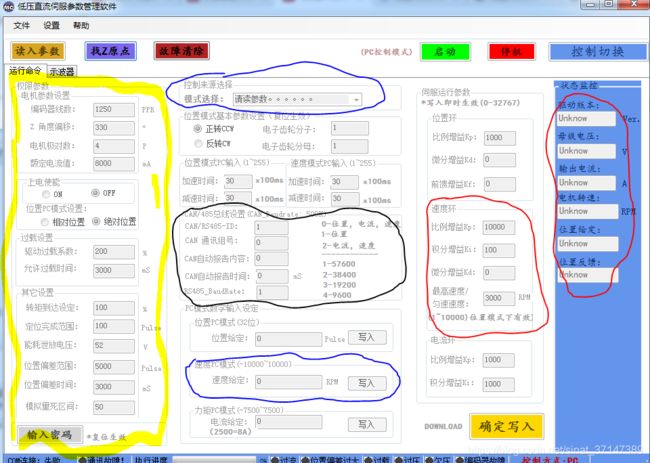
上图中黄色框部分我基本上没有改动,厂家给定的参数即可。蓝色框部分是我用到的部分,需要选择模式,上方的是PC端输入,下方是速度控制即转速控制。中间黑色框部分是设置CAN报文的时间即多长时间发送报文,我设置的是0,因为我在STM32身上会发送相关请求指令,关键的是CAN的波特率一定和STM32的对应上,否则会有一些麻烦,还有就是可以再软件上设置CAN的ID号和组号,通过设置ID可以使STM32识别不同的电机并且发送相关指令。右侧的红色框是PID调节部分,这一部分需要自己调节,一般厂家也会设置好,这里面很方便不会占用很长时间。一般PID调节的首先需要使ID为0,开始调节P值,从小到大,然后在接近目标速度时需要将此时的值记下并乘以0.75,然后开始调节I,使波动范围最小确定下此时的I值,最后调节PI以及D的值使其更精确,一般都用PI调节。最右侧的红色框表示对电压以及电流的转速等的监控。最后驱动器连接好的如下图所示。

上图中左侧的“网线”是和上位机进行232通讯,配置相关参数即上位机软件,此口也会用到和STM32进行CAN通讯的连接。中间的连线接电机,右侧红黑线是电源。相关的参数是电机48V,200W,编码器码盘线数2500,4倍频。其实以上说的这些都是厂家给的资料信息,其中有些接线是自己制作的。
- CAN的连线部分
一般CAN的部分网上有很多,我觉得这位博主的还行关于CAN,需要注意的是终端电阻的配置,一般为120欧。其次是伺服直流电机驱动器和STM32的连接情况,就是“高接高,低接低”,CAN_H和CAN_H对应,CAN_L和CAN_L对应。其次就是CAN-USB的分析仪,这个设备在CAN调试上有着至关重要的作用。给个图,嘿嘿。这个图是在网上找的,我实际上用的和这个差不多,不过比这个圆润多了。

前期的准备工作已经差不多了,主要是在各种接线和一些初始化的配置。这个根据每个人不同的情况来定。接下来就是在STM32上进行编程设计了。
2CAN的配置和使用
STM32这个工控板是含有一个CAN通讯接口的,下面就需要在软件上对其进行一定的配置。具体代码如下:
void CAN1_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
CAN_InitTypeDef CAN_InitStructure;
CAN_FilterInitTypeDef CAN_FilterInitStructure;
/* 复用功能和GPIOB端口时钟使能*/
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO | RCC_APB2Periph_GPIOB, ENABLE);
/* CAN1 模块时钟使能 */
RCC_APB1PeriphClockCmd(RCC_APB1Periph_CAN1, ENABLE);
/* Configure CAN pin: RX */ // PB8
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU; // 上拉输入
GPIO_Init(GPIOB, &GPIO_InitStructure);
/* Configure CAN pin: TX */ // PB9
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; // 复用推挽输出
GPIO_Init(GPIOB, &GPIO_InitStructure);
//#define GPIO_Remap_CAN GPIO_Remap1_CAN1 本实验没有用到重映射I/O
GPIO_PinRemapConfig(GPIO_Remap1_CAN1, ENABLE);
//CAN_NVIC_Configuration(); //CAN中断初始化
/* Configure the NVIC Preemption Priority Bits */
//NVIC_PriorityGroupConfig(NVIC_PriorityGroup_0);
#ifdef VECT_TAB_RAM
/* Set the Vector Table base location at 0x20000000 */
NVIC_SetVectorTable(NVIC_VectTab_RAM, 0x0);
#else /* VECT_TAB_FLASH */
/* Set the Vector Table base location at 0x08000000 */
NVIC_SetVectorTable(NVIC_VectTab_FLASH, 0x0);
#endif
/* enabling interrupt */
NVIC_InitStructure.NVIC_IRQChannel=USB_LP_CAN1_RX0_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 2;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
//CAN_INIT();//CA初始化N模块
/* CAN register init */
CAN_DeInit(CAN1); //将外设CAN的全部寄存器重设为缺省值
CAN_StructInit(&CAN_InitStructure);//把CAN_InitStruct中的每一个参数按缺省值填入
/* CAN cell init */
CAN_InitStructure.CAN_TTCM=DISABLE; //没有使能时间触发模式
CAN_InitStructure.CAN_ABOM=DISABLE; //没有使能自动离线管理
CAN_InitStructure.CAN_AWUM=DISABLE; //没有使能自动唤醒模式
CAN_InitStructure.CAN_NART=DISABLE; //没有使能非自动重传模式
CAN_InitStructure.CAN_RFLM=DISABLE; //没有使能接收FIFO锁定模式
CAN_InitStructure.CAN_TXFP=DISABLE; //没有使能发送FIFO优先级
CAN_InitStructure.CAN_Mode=CAN_Mode_Normal;//CAN设置为正常模式
CAN_InitStructure.CAN_SJW=CAN_SJW_1tq; //重新同步跳跃宽度1个时间单位
CAN_InitStructure.CAN_BS1=CAN_BS1_3tq; //时间段1为3个时间单位
CAN_InitStructure.CAN_BS2=CAN_BS2_2tq; //时间段2为2个时间单位
CAN_InitStructure.CAN_Prescaler=6; //时间单位长度为60
CAN_Init(CAN1,&CAN_InitStructure); //波特率为:72M/2/6(1+3+2)=1 即波特率为1000KBPs
//CAN filter init 过滤器,已经设置为任意,可以通过ExtId标识符区分从机代号
CAN_FilterInitStructure.CAN_FilterNumber=1; //指定过滤器为1
CAN_FilterInitStructure.CAN_FilterMode=CAN_FilterMode_IdMask; //指定过滤器为标识符屏蔽位模式
CAN_FilterInitStructure.CAN_FilterScale=CAN_FilterScale_32bit; //过滤器位宽为32位
CAN_FilterInitStructure.CAN_FilterIdHigh=0x0000; //过滤器标识符的高16位值
CAN_FilterInitStructure.CAN_FilterIdLow=CAN_ID_EXT|CAN_RTR_DATA;//过滤器标识符的低16位值
CAN_FilterInitStructure.CAN_FilterMaskIdHigh=0x0000; //过滤器屏蔽标识符的高16位值
CAN_FilterInitStructure.CAN_FilterMaskIdLow=0x0000; //过滤器屏蔽标识符的低16位值
CAN_FilterInitStructure.CAN_FilterFIFOAssignment=CAN_FIFO0; //设定了指向过滤器的FIFO为0
CAN_FilterInitStructure.CAN_FilterActivation=ENABLE; //使能过滤器
CAN_FilterInit(&CAN_FilterInitStructure); //按上面的参数初始化过滤器
/* CAN FIFO0 message pending interrupt enable */
CAN_ITConfig(CAN1,CAN_IT_FMP0, ENABLE); //使能FIFO0消息挂号中断
}此段代码为CAN的初始化设置。一般在网络上都可以找到的。接下来呢就是需要通过CAN给电机发送指令使电机转起来啊,这部分呢是根据厂家的具体CAN协议配置的发送指令的。 例如像如下情况,可以对ID位和数据进行设置。根据厂家手册进行设置即可,这里不一一说明了。

接下来就是CAN得发送指令部分,如下代码,这里使用的是标准标识。
/* 发送数据*/
u8 CAN_SendMsg(uint32_t ID, u8* data)
{
u8 mbox;
u16 i=0;
CanTxMsg TxMessage;
TxMessage.StdId=ID; //标准标识符为ID
TxMessage.ExtId=0x0000; //扩展标识符0x0000
TxMessage.IDE=CAN_ID_STD; //使用扩展标识符
TxMessage.RTR=CAN_RTR_DATA; //为数据帧
TxMessage.DLC=8; //消息的数据长度为2个字节
for(i=0;i<8;i++)
TxMessage.Data[i] = data[i];
//发送数据
mbox= CAN_Transmit(CAN1, &TxMessage);
while((CAN_TransmitStatus(CAN1, mbox)==CAN_TxStatus_Failed)&&(i<0XFFF))
i++; //等待发送结束
if(i>=0XFFF)
return 0;//发送失败
return 1;//发送成功
}这个函数是为发送速度指令所服务的,以上的代码是在can.c文件中的,还需要设置控制电机转速的函数即需要在motor.c函数中设置转速,代码如下
void Motor_Init(void)
{
//使用速度模式
CommandData[0]=0x00;
CommandData[1]=FCW_One2One;
CommandData[2]=Register_Mode;
CommandData[3]=0x00;
CommandData[4]=0xc4;
CommandData[5]=Register_Mode;
CommandData[6]=0x00;
CommandData[7]=0xc4;
CAN_SendMsg(ID_RightMotor, CommandData);//右侧轮子
CAN_SendMsg(ID_LeftMotor, CommandData);//左侧轮子
// //设置电机的加减速参数,软件上设置
// CommandData[0]=0x00;
// CommandData[1]=FCW_One2Many; //点对点模式
// CommandData[2]=Resister_AccTimeInSpeed;
// CommandData[3]=0x03;
// CommandData[4]=0x03;
// CommandData[5]=Resister_AccTimeInSpeed;
// CommandData[6]=0x03;
// CommandData[7]=0x03;
//// CAN_SendMsg(ID_LeftMotor, CommandData);
//// CAN_SendMsg(ID_RightMotor, CommandData);
//设置电机启动使能,两个轮子共同使用
CommandData[0]=0x00;
CommandData[1]=FCW_One2One;
CommandData[2]=Register_SpeedSet;
CommandData[3]=0x01;
CommandData[4]=0xff;
CommandData[5]=Register_Moter;
CommandData[6]=0x00;
CommandData[7]=0x00;
// CAN_SendMsg(ID_Master, CommandData);
CAN_SendMsg(ID_RightMotor, CommandData);
CAN_SendMsg(ID_LeftMotor, CommandData);
}
//设置目标转速,直接输入的是转速值
void Set_SpeedTarget(uint32_t ID, float target_speed)
{
// int speed = Speed2RPM((target_speed/8192.0)*3000);//????这么计算不知道有没有问题
int speed = (target_speed/3000)*8192;
CommandData[0]=0x00;
CommandData[1]=FCW_One2One;
CommandData[2]=Register_SpeedSet;
CommandData[3]=(speed >> 8) & 0XFF; //将speed左移8个单位在和0xff与,取speed的前8位
CommandData[4]=speed & 0XFF; //将speed和0xff与,取speed的后8位
CommandData[5]=Register_Moter;
CommandData[6]=0x00;
CommandData[7]=0x01;
CAN_SendMsg(ID, CommandData);先进行初始化,设置电机的工作模式,使能等(这些根据厂家资料进行配置),主要的函数在Set_SpeedTarget函数上。此时就可以启动电机给其发送相关的速度了。 这里需要注意的是在CAN得工作模式是可以根据协议进行选择的,分为一对一和一对多的模式,根据实际情况进行分析。
最后就是关于CAN的中断函数了,我在CAN得中断函数中,实现的功能是读取电机的电流和脉冲等信息,此处判断的协议是根据驱动器给定的参数地址而定的;如何使STM32之间的通讯则需要设置主从机以及相关的地址。这里应该用到的CAN的扩展帧。可以参考这个STM32之间的CAN通讯。结合上述的代码,我的can.c文件余下部分如下:
CanRxMsg RxMessage;
u8 CAN_RX_BUF[CAN_RX_LEN]={0}; //接收缓冲,最大USART_REC_LEN个字节.
/* USB中断和CAN接收中断服务程序,USB跟CAN公用I/O,这里只用到CAN的中断。 */
void USB_LP_CAN1_RX0_IRQHandler(void)
{
u16 i =0,j=0;//u8不能显示全,
float k = 0 ;//反应电流的值
// GPIO_WriteBit(GPIOB,GPIO_Pin_13,1-(GPIO_ReadOutputDataBit(GPIOB,GPIO_Pin_13)));//检测是否进入CAN的中断,D2
LED1 = !LED1;//检测是否进入CAN的中断,D2
Can_data_init(); //清除CAN中断数据
CAN_Receive(CAN1,CAN_FIFO0, &RxMessage);
//返回里程计信息
//OLED显示电机转速和电流
//电机5
if(RxMessage.StdId == ID_LeftMotor)
{
OLED_ShowString(12, 10,"ID5s:",16);
//显示转速
if(RxMessage.Data[5] == Resister_RSpeed)
{
i = RxMessage.Data[6] << 8 | RxMessage.Data[7];
//判断正反转
if(i>8192)
{
i = -(RxMessage.Data[6] << 8 | RxMessage.Data[7]);//取反进行操作,取出负的转速
i = (i/8192.0)*3000;//转速为负
OLED_ShowString(6,12,"-",16);
OLED_ShowNum(14,12,i,5,16);
}
else
{
i = (i/8192.0)*3000;
OLED_ShowNum(12,12,i,5,16);
}
}
//显示电流
if(RxMessage.Data[2]==Resister_Current)
{
Rx_flag = 1;
k = RxMessage.Data[3] << 8 | RxMessage.Data[4];
k = k/100;
OLED_ShowNumber(12,14,k);
}
//显示脉冲个数
if((RxMessage.Data[2]==Resister_ROdomH)&&(RxMessage.Data[1]==FCR_One2One_Ri))
{
//求解里程信息
now_L = (RxMessage.Data[3] << 32 | RxMessage.Data[4]<< 16|RxMessage.Data[6] << 8 | RxMessage.Data[7]);//????注意反馈的位置由脉冲数表示???转换成里程m
// *odom = (now - past) / ((double)PlusePerRound*90) * (PI*Diameter);//里程计信息,采样时间内轮子行走的距离
left_odom = (now_L - past_L);//发送脉冲个数
past_L = now_L;//时间更新
flagcan1 =1;
}
}
//电机6
else if(RxMessage.StdId == ID_RightMotor)
{
OLED_ShowString(80, 10,"ID6s:",16);
//显示转速
if(RxMessage.Data[5] == Resister_RSpeed)
{
j = RxMessage.Data[6] << 8 | RxMessage.Data[7];
//判断正反转,最大设置为3000转
if(j>8192)
{
j = -((RxMessage.Data[6]) << 8 | RxMessage.Data[7]);//取反进行操作,取出负的转速
j = (j/8192.0)*3000;
OLED_ShowString(70,12,"-",16);
OLED_ShowNum(80,12,j,5,16);
}
else
{
j = (j/8192.0)*3000;
OLED_ShowNum(80,12,j,5,16);
}
}
//显示电流
if(RxMessage.Data[2]==Resister_Current)
{
Rx_flag = 1;
k = RxMessage.Data[3] << 8 | RxMessage.Data[4];
k = k/100;
OLED_ShowNumber(80,14,k);
}
//显示里程计
if((RxMessage.Data[2]==Resister_ROdomH)&&(RxMessage.Data[1]==FCR_One2One_Ri))
{
//求解里程信息
now_R = (RxMessage.Data[3] << 32 | RxMessage.Data[4]<< 16|RxMessage.Data[6] << 8 | RxMessage.Data[7]);//????注意反馈的位置由脉冲数表示???转换成里程m
// *odom = (now - past) / ((double)PlusePerRound*90) * (PI*Diameter);//里程计信息,采样时间内轮子行走的距离
right_odom = (now_R - past_R);//发送脉冲个数
past_R = now_R;//时间更新
flagcan2 = 2;
}
}
}
//CAN清除处理
void Can_data_init(void)
{
RxMessage.StdId=0x00;
RxMessage.ExtId=0x00;
RxMessage.IDE=0;
RxMessage.DLC=0;
RxMessage.FMI=0;
RxMessage.Data[0]=0x00;
RxMessage.Data[1]=0x00;
RxMessage.Data[2]=0x00;
RxMessage.Data[3]=0x00;
RxMessage.Data[4]=0x00;
RxMessage.Data[5]=0x00;
RxMessage.Data[6]=0x00;
RxMessage.Data[7]=0x00;
}上述电机设置的ID号为5和6,这里需要根据自己的实际情况更改即可
3串口的使用
串口这一部分是和上位机进行通讯的部分,可以分为两个部分进行,一部分为串口接收数据,一部分为串口读取数据。首先需要说的是串口接收数据,这部分的调试是依靠上位机的串口助手进行,上位机助手通过发送一系列的指令给STM32,然后STM32通过这些指令分析出两个轮子的速度并通过CAN给其发送转速命令。需要的工具贴张图,比较常见的设备。

接下来就是串口的代码部分,其中包含初始化,接收中断,和发送。
#include "usart.h"
#include "contact.h"
//#include "oled.h"
#if SYSTEM_SUPPORT_UCOS
#include "includes.h" //ucos 使用
#endif
//////////////////////////////////////////////////////////////////
//加入以下代码,支持printf函数,而不需要选择use MicroLIB
#if 1
#pragma import(__use_no_semihosting)
//标准库需要的支持函数
struct __FILE
{
int handle;
};
FILE __stdout;
//定义_sys_exit()以避免使用半主机模式
void _sys_exit(int x)
{
x = x;
}
//重定义fputc函数
int fputc(int ch, FILE *f)
{
while((USART1->SR&0X40)==0)
;//循环发送,直到发送完毕
USART1->DR = (u8) ch;
return ch;
}
#endif
//串口1中断服务程序
//注意,读取USARTx->SR能避免莫名其妙的错误
u8 USART_RX_BUF[USART_REC_MAXLEN]={0}; //接收缓冲,最大USART_REC_LEN个字节.
//u16 USART_RX_STA=0; //接收状态标记
u8 len=0;
u8 j=0;
u8 m;
//初始化IO 串口1
//bound:波特率
void USART1_Init(u32 bound)
{
//GPIO端口设置
GPIO_InitTypeDef GPIO_InitStructure; //串口端口配置结构体变量
USART_InitTypeDef USART_InitStructure; //串口参数配置结构体变量
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA | RCC_APB2Periph_AFIO, ENABLE); //打开GPIOA时钟和GPIOA复用时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1, ENABLE); //打开串口复用时钟
USART_DeInit(USART1); //复位串口1
//USART1_TX PA.9
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9; //PA.9
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_Init(GPIOA, &GPIO_InitStructure); //初始化PA9
//USART1_RX PA.10
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;//浮空输入
GPIO_Init(GPIOA, &GPIO_InitStructure); //初始化PA10
//Usart1 NVIC 配置
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=0;//抢占优先级3
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1; //子优先级3
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道使能
NVIC_Init(&NVIC_InitStructure); //根据指定的参数初始化VIC寄存器
//USART 初始化设置
USART_InitStructure.USART_BaudRate = bound;//一般设置为9600;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;//字长为8位数据格式
USART_InitStructure.USART_StopBits = USART_StopBits_1;//一个停止位
USART_InitStructure.USART_Parity = USART_Parity_No;//无奇偶校验位
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//无硬件数据流控制
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //收发模式
USART_Init(USART1, &USART_InitStructure); //初始化串口
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);//开启中断
USART_Cmd(USART1, ENABLE); //使能串口
USART_ClearFlag(USART1, USART_FLAG_TC); //清串口1发送标志
}
union float2uchar LeftMotor_TargetVel, RightMotor_TargetVel;
union int2uchar LeftMotor, RightMotor;
void USART1_IRQHandler(void)
{
OLED_ShowNumber(80, 12, len);
if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET) //接收中断(接收到的数据必须是0x0d 0x0a结尾)
{
// USART_ClearITPendingBit(USART1,USART_IT_RXNE);
USART_RX_BUF[len] = USART_ReceiveData(USART1);//(USART1->DR); //读取接收到的数据
len++;
// Set_SpeedTarget(ID_RightMotor, (float)USART_ReceiveData(USART1));
if(USART_RX_BUF[0]== 0x44)//判断包头
{
if(USART_RX_BUF[9] == 0x0a)//接收完毕标志
{
// OLED_ShowNumber(119, 0, 5);
OLED_clearRow(119,0,130);
OLED_ShowNumber(119, 0, 4);
for(m = 0 ; m < 4 ; m++)
{
LeftMotor_TargetVel.data[m] = USART_RX_BUF[m+1];
RightMotor_TargetVel.data[m] = USART_RX_BUF[m+4+1];
}
// Set_SpeedTarget(ID_LeftMotor, LeftMotor_TargetVel.value);//int型的试探
// Set_SpeedTarget(ID_RightMotor, RightMotor_TargetVel.value);
Set_SpeedTarget(ID_LeftMotor, LeftMotor_TargetVel.value);
Set_SpeedTarget(ID_RightMotor, RightMotor_TargetVel.value);
// OLED_clearRow(60,14,130);
OLED_ShowNumber(70,14, LeftMotor_TargetVel.value);
OLED_ShowNumber(100,14, RightMotor_TargetVel.value);
}
}
else
{
len = 0;
}
}
if((len>=10)||(len>USART_REC_MAXLEN))
{
// OLED_ShowNumber(30, 14, USART_RX_BUF[0]);
// OLED_ShowNumber(50, 14, USART_RX_BUF[9]);
Clear_serialBuffer();
}
//如果发生溢出先读SR,在读DR寄存器则可清除出不断如中断的问题
if(USART_GetFlagStatus(USART1,USART_FLAG_ORE) == SET)
{
USART_ReceiveData(USART1);
USART_ClearFlag(USART1,USART_FLAG_ORE);
}
}
//发送数据
void UART1SendByte(char SendData)
{
USART_SendData(USART1,SendData);
while(USART_GetFlagStatus(USART1, USART_FLAG_TXE) == RESET);
}
void Clear_serialBuffer(void)
{
USART_RX_STA=0;//清楚接收标志位
len =0;
memset(USART_RX_BUF, 0, sizeof(u8)*USART_REC_MAXLEN);//清空缓冲区
}
这个和创客智造的有些区别,我做了一些修改,效果还可以,不过还需要再进一步的验证了,主要在中断函数那,串口接收数据是按照一个字节进行接收,这里我设定了发送的串口数据包头和包尾,以字符‘D’为头,‘\n’为尾,以16进制发送,就是0x44和0x0a了然后中间的8位是两个轮子的转速数据,这里涉及到一个Union共同体的知识,这个需要加深一下理解。大家可以参考Unino共同体 ,主要在内存分配的空间上,以及数据怎么转换上,最好用编译软件敲下代码这样很容易理解。
union float2uchar //接收到的数据
{
float value; //轮速度
unsigned char data[4];
};上面贴的代码就是一个Union共同体了,其中float型数据占用四个字节,unsignedchar型占用一个字节,其实value的地址和data[4]的首地址是相同的,当然值也是可以共同使用的。不过在调试过程中需要注意的是,在flaot和char数组转换的过程中不是和正常思维一样的,具体怎么转换我也不是很明白,但是如果数组的元素值设置不正确会使转换的值为0,这样下发的速度值为零,为调试带来很多不便。所以在利用串口调试助手调试的过程中最好用代码实现下,还是很简单的。如果STM32直接和Linux系统的上位连接,使用ROS发布串口信息可能此处不需要串口助手,视情况而定了。
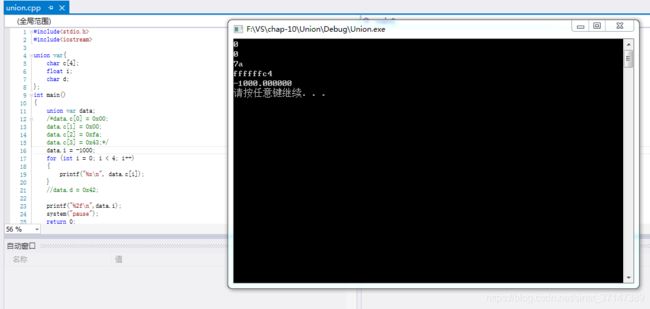
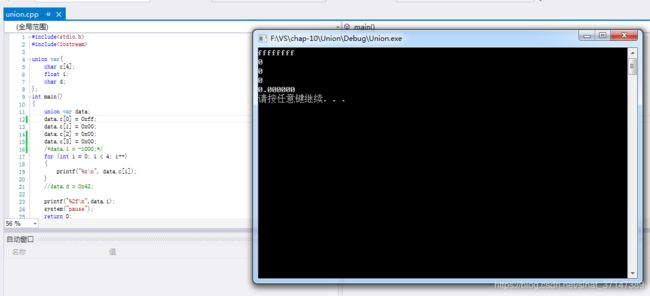
上述的结果请可以忽略很多ff情况,取后两位即可,具体原因我也不是很明白,谁知道请在评论告诉我,谢谢了!还有就是数组元素代表的地位和高位,我这个是c[0]是最低位,c[3]是最高位,一次增高,这个根据不同的操作系统可能不同,这个需要考证一下。Union共同体部分使用完毕了。 这里串口接收到数据直接利用CAN发送给电机,实时性更好一些。
下一个部分是串口发送部分,这个部分的主要功能是把里程计信息发送给上位机,直接上代码。
extern float left_odom, right_odom;
char DF2ROS[22]={0}; //数据帧,发送给上位机的里程计数据
u8 send_odoemtry(void)
{
u8 i=0;
double angle_vel,angle_yaw;
union float2uchar position_x,position_y,oriention,velocity_linear,velocity_angular; //里程计值
DF2ROS[0] = 'D';
//if(Get_Odometry(ID_LeftMotor, &left_odom) && Get_Odometry(ID_RightMotor, &right_odom))
//if(Check_canRX())
//获取里程计和转速电流信?
Get_Odometry(ID_LeftMotor);
Get_Odometry(ID_RightMotor);
OLED_clearRow(12,12,90);
OLED_ShowNumber(12,12,left_odom/((double)PlusePerRound*90) * (PI*Diameter));
OLED_clearRow(12,14,90 );
OLED_ShowNumber(12,14,right_odom/((double)PlusePerRound*90) * (PI*Diameter));
compute_odometry(left_odom,right_odom);
get_odometry(&(position_x.value), &(position_y.value), &(oriention.value), &(velocity_linear.value), &(velocity_angular.value));
//将所有里程计数据存到要发送的数组
for(i=0;i<4;i++)
{
DF2ROS[i+1]=position_x.data[i];
DF2ROS[i+5]=position_y.data[i];
DF2ROS[i+9]=oriention.data[i];
DF2ROS[i+13]=velocity_linear.data[i];
DF2ROS[i+17]=velocity_angular.data[i];
}
DF2ROS[21]='\n';
//发送数据到串口
for(i=0;i<22;i++)
{
USART_ClearFlag(USART1,USART_FLAG_TC); //在发送第一个数据前加此句,解决第一个数据不能正常发送的问题
UART1SendByte(DF2ROS[i]);//发送到传口
}
return serial_flag;
}声明的 left_odom, right_odom在主函数中定义了,目的是获取里程计信息,还有比较重要的部分是里程计的获取和计算,其中获取部分在CAN中断函数中有说明了,我这里理解的是获取的是脉冲数,这里需要了解一下编码器的相关知识,我们用的是增量式编码器,包括一些码盘线数和倍频数需要根据自己实际情况而定。下面的代码是motor.c文件中的获取里程计命令,由CAN发送。
int Get_Odometry(uint32_t ID)
{
CommandData[0]=0x00;
CommandData[1]=FCR_One2One;
CommandData[2]=Resister_ROdomH;
CommandData[3]=0;
CommandData[4]=0;
CommandData[5]=Resister_ROdomL;
CommandData[6]=0;
CommandData[7]=0;
CAN_SendMsg(ID, CommandData);
return 0;
}下面代码是odometry.c文件,主要参考的创客智造智造的原理,这里需要了解一下差速小车的运动模型了,航迹推算这部分由比较有名的博主白巧克亦唯心写的,大家可以关注下,挺厉害的以为帅哥。还有对SLAM感兴趣的也可以看一看他的博客,里面有一些底层和上层技术的博文,个人感觉很好。下面就是代码了
#include "odometry.h"
#include "math.h"
/*********************************************** 输出 *****************************************************************/
float position_x=0,position_y=0,oriention=0,velocity_linear=0,velocity_angular=0;
/*********************************************** 输入 *****************************************************************/
//extern float odometry_right,odometry_left;//串口得到的左右轮速度
/*********************************************** 变量 *****************************************************************/
//float wheel_interval= 268.0859f;// 272.0f; // 1.0146
//float wheel_interval=276.089f; //轴距校正值=原轴距/0.987
float wheel_interval= 620.0f;
float multiplier=4.0f; //倍频数
float deceleration_ratio=90.0f; //减速比
//float wheel_diameter=100.0f; //轮子直径,单位mm
float wheel_diameter=200.0f; //轮子直径,单位mm 新
float pi_1_2=1.570796f; //π/2
float pi=3.141593f; //π
float pi_3_2=4.712389f; //π*3/2
float pi_2_1=6.283186f; //π*2
float dt=0.005f; //采样时间间隔5ms
//float line_number=4096.0f; //码盘线数
float line_number=2500; //码盘线数,新
float oriention_interval=0; //dt时间内方向变化值
float sin_=0; //角度计算值
float cos_=0;
float delta_distance=0,delta_oriention=0; //采样时间间隔内运动的距离
float const_frame=0,const_angle=0,distance_sum=0,distance_diff=0;
float oriention_1=0;
//union float2uchar left_current,left_speed,right_current,right_speed;
u8 once=1;
/****************************************************************************************************************/
//里程计计算函
void compute_odometry(float odom_right,float odom_left)
{ if(once) //常数仅计算一次
{
const_frame=wheel_diameter*pi/(line_number*multiplier*deceleration_ratio);
const_angle=const_frame/wheel_interval;
once=0;
}
distance_sum = 0.5f*(abs(odom_right)+abs(odom_left));//在很短的时间内,小车行驶的路程为两轮速度和
distance_diff = abs(odom_right)-abs(odom_left);//在很短的时间内,小车行驶的角度为两轮速度差
//根据左右轮的方向,纠正短时间内,小车行驶的路程和角度量的正负
if((odom_left>0)&&(odom_right<0)) //左右均正?/,新:前进,左正右负
{
delta_distance = distance_sum;
delta_oriention = distance_diff;
// OLED_ShowNumber(119, 0, 0);
}
else if((odom_left<0)&&(odom_right>0)) //左右均负//,新:后退,左负右正
{
delta_distance = -distance_sum;
delta_oriention = -distance_diff;
// OLED_ShowNumber(119, 0, 1);
}
else if((odom_left<0)&&(odom_right<0)) //左正右负//,新:逆时针左右均负
{
delta_distance = -distance_diff;
delta_oriention = -2.0f*distance_sum;
// OLED_ShowNumber(119, 0, 2);
}
else if((odom_left>0)&&(odom_right>0)) //左负右zheng//新:顺时针,左右均正
{
delta_distance = distance_diff;
delta_oriention = 2.0f*distance_sum;
// OLED_ShowNumber(119, 0, 3);
}
else
{
delta_distance=0;
delta_oriention=0;
// OLED_ShowNumber(119, 0, 4);
}
oriention_interval = delta_oriention * const_angle;//采样时间内走的角度
oriention = oriention + oriention_interval;//计算出里程计方向角
oriention_1 = oriention + 0.5f * oriention_interval;//里程计方向角数据位数变化,用于三角函数计算
sin_ = sin(oriention_1);//计算出采样时间内y坐标
cos_ = cos(oriention_1);//计算出采样时间内x坐标
// OLED_ShowNumber(70,12,cos_);
// OLED_ShowNumber(70,14,sin_);
position_x = position_x + delta_distance * cos_ * const_frame;//计算出里程计x坐标
position_y = position_y + delta_distance * sin_ * const_frame;//计算出里程计y坐标
velocity_linear = delta_distance*const_frame / dt;//计算出里程计线速度
velocity_angular = oriention_interval / dt;//计算出里程计角速度
// OLED_ShowNumber(70,14, velocity_angular);
/*
// //采样时间内走的角度
// oriention_interval = delta_oriention / wheel_interval;
// oriention = oriention + oriention_interval;//计算出里程计方向角
//
// //计算出里程计线速度
// velocity_linear = distance_sum / dt;
// velocity_angular = oriention_interval / dt;//计算出里程计角速度
// //
//
*/
//方向角角度纠正
if(oriention > pi)
{
oriention -= pi_2_1;
}
else
{
if(oriention < -pi)
{
oriention += pi_2_1;
}
}
}
void get_odometry(float *x, float *y, float *ori, float *vel_linear, float *vel_angular)
{
*x = position_x;
*y = position_y;
*ori = oriention;
*vel_linear = velocity_linear;
*vel_angular = velocity_angular;
}
这个代码没怎么修改了。
最后贴出个效果图,当然只是利用串口助手调试的图了,串口给发送速度指令,并接收回来里程计信息。对了,这里波特率以及一些奇偶校验位,停止位,数据位要和STM32串口设置的一样。还有就是这里是多条发送,否则的话接收会出现错误,这里需要注意一下。
我认为整体上比较重要的点就是上面所说的这些了,有些代码不是原创,但是在修改上也花了很大一部分时间,我这也算是初学,有错误的地方希望大家指正!在ROS小车底层部分说完了,可能也不是很详细,自己遇到的一些小问题和大家分享下。下一步打算在Linux下使用ROS让这个小车动起来!!