卡尔曼滤波的C++实现
作者:博客如
来源:CSDN
原文:https://blog.csdn.net/m0_38089090/article/details/79523784
版权声明:本文为博主原创文章,转载请附上博文链接!
转载只为日后好用,原创在上方.
写博客记录下做过的工作,毕竟好记性不如烂笔头。
卡尔曼滤波算法的博客很多,白巧克力亦唯心http://blog.csdn.net/heyijia0327的阐述应该是较为通俗易懂的,他的理论部分是参考Greg Welch & Gary Bishop. << An Introduction to the Kalman Filter >>,实例小车部分类似文章Ramsey Faragher. << Understanding the Basis of the Kalman Filter Via a Simple and Intuitive Derivation >>,网上都可以找到。
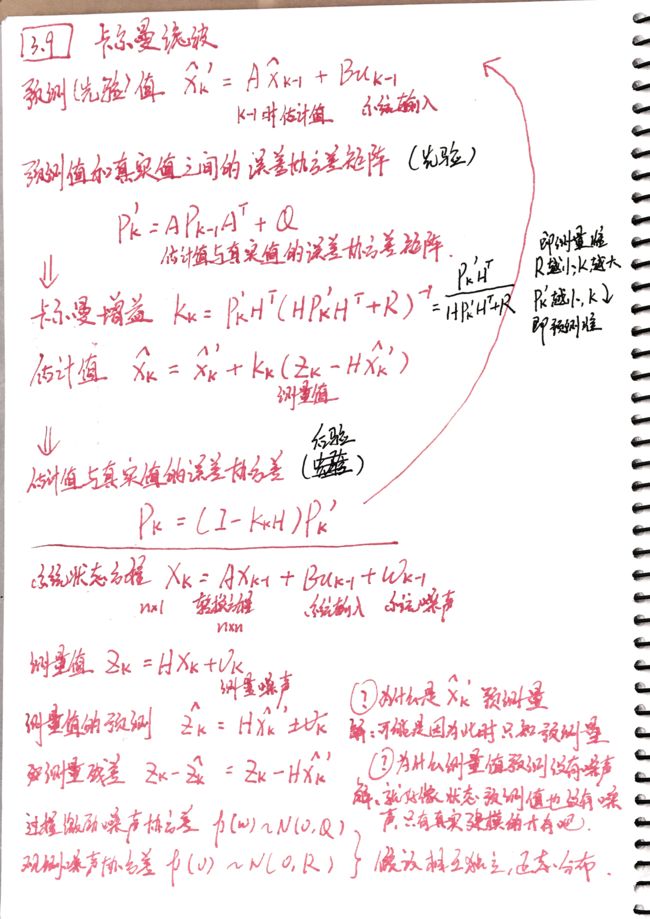
以下是学习过程中的笔记,略潦草,省略了具体的公式推导,呈现了卡尔曼滤波的基本算法流程(需要事先了解相关概念)。
matlab仿真可以看http://blog.csdn.net/heyijia0327/article/details/17667341,因为最近在复习C++,所以用C++写了一个,简陋之处望指正。
应用背景是匀加速小车,该线性系统的状态差分方程为
对小车进行建模,ft为合力,小车的状态方程表示为
矩阵形式表示为
具体程序如下,某些参数定义见注释。
// Kalme.cpp : 定义控制台应用程序的入口点。
//
#include "stdafx.h"
#include
#include
#include
#include
#include
#include
#include
using namespace std;
using Eigen::MatrixXd;
int _tmain(int argc, _TCHAR* argv[])
{
//""中是txt文件路径,注意:路径要用//隔开
ofstream fout("..//result.txt");
double generateGaussianNoise(double mu, double sigma);//随机高斯分布数列生成器函数
const double delta_t = 0.1;//控制周期,100ms
const int num = 100;//迭代次数
const double acc = 10;//加速度,ft/m
MatrixXd A(2,2);
A(0,0) = 1;
A(1,0) = 0;
A(0,1) = delta_t;
A(1,1) = 1;
MatrixXd B(2,1);
B(0,0) = pow(delta_t,2)/2;
B(1,0) = delta_t;
MatrixXd H(1,2);//测量的是小车的位移,速度为0
H(0,0) = 1;
H(0,1) = 0;
MatrixXd Q(2,2);//过程激励噪声协方差,假设系统的噪声向量只存在速度分量上,且速度噪声的方差是一个常量0.01,位移分量上的系统噪声为0
Q(0,0) = 0;
Q(1,0) = 0;
Q(0,1) = 0;
Q(1,1) = 0.01;
MatrixXd R(1,1);//观测噪声协方差,测量值只有位移,它的协方差矩阵大小是1*1,就是测量噪声的方差本身。
R(0,0) = 10;
//time初始化,产生时间序列
vector
for(decltype(time.size()) i = 0; i != num; ++i){
time[i] = i * delta_t;
//cout<
MatrixXd X_real(2,1);
vector
//生成高斯分布的随机数
for(int i = 0; i<100;++i){
MatrixXd a(1,1);
a(0,0) = generateGaussianNoise(0,sqrt(10));
rand.push_back(a);
}
//生成真实的位移值
for(int i = 0; i < num; ++i){
X_real(0,0) = 0.5 * acc * pow(time[i],2);
X_real(1,0) = 0;
x_real.push_back(X_real);
}
//变量定义,包括状态预测值,状态估计值,测量值,预测状态与真实状态的协方差矩阵,估计状态和真实状态的协方差矩阵,初始值均为零
MatrixXd X_evlt = MatrixXd::Constant(2,1,0), X_pdct = MatrixXd::Constant(2,1,0), Z_meas = MatrixXd::Constant(1,1,0),
Pk = MatrixXd::Constant(2,2,0), Pk_p = MatrixXd::Constant(2,2,0), K = MatrixXd::Constant(2,1,0);
vector
x_evlt.push_back(X_evlt);
x_pdct.push_back(X_pdct);
z_meas.push_back(Z_meas);
pk.push_back(Pk);
pk_p.push_back(Pk_p);
k.push_back(K);
//开始迭代
for(int i = 1; i < num; ++i){
//预测值
X_pdct = A * x_evlt[i-1] + B * acc;
x_pdct.push_back(X_pdct);
//预测状态与真实状态的协方差矩阵,Pk'
Pk_p = A * pk[i-1] * A.transpose() + Q;
pk_p.push_back(Pk_p);
//K:2x1
MatrixXd tmp(1,1);
tmp = H * pk_p[i] * H.transpose() + R;
K = pk_p[i] * H.transpose() * tmp.inverse();
k.push_back(K);
//测量值z
Z_meas = H * x_real[i] + rand[i];
z_meas.push_back(Z_meas);
//估计值
X_evlt = x_pdct[i] + k[i] * (z_meas[i] - H * x_pdct[i]);
x_evlt.push_back(X_evlt);
//估计状态和真实状态的协方差矩阵,Pk
Pk = (MatrixXd::Identity(2,2) - k[i] * H) * pk_p[i];
pk.push_back(Pk);
}
cout<<"含噪声测量"<<" "<<"后验估计"<<" "<<"真值"<<" "<
//cout<
fout.close();
return 0;
}
//生成高斯分布随机数的函数,网上找的
double generateGaussianNoise(double mu, double sigma)
{
const double epsilon = std::numeric_limits
const double two_pi = 2.0*3.14159265358979323846;
static double z0, z1;
static bool generate;
generate = !generate;
if (!generate)
return z1 * sigma + mu;
double u1, u2;
do
{
u1 = rand() * (1.0 / RAND_MAX);
u2 = rand() * (1.0 / RAND_MAX);
}
while ( u1 <= epsilon );
z0 = sqrt(-2.0 * log(u1)) * cos(two_pi * u2);
z1 = sqrt(-2.0 * log(u1)) * sin(two_pi * u2);
return z0 * sigma + mu;
}
将数据结果加载到matlab,绘图如下所示,可以看到红色的估计值和黑色的真实值基本吻合,蓝色的为含噪声测量值。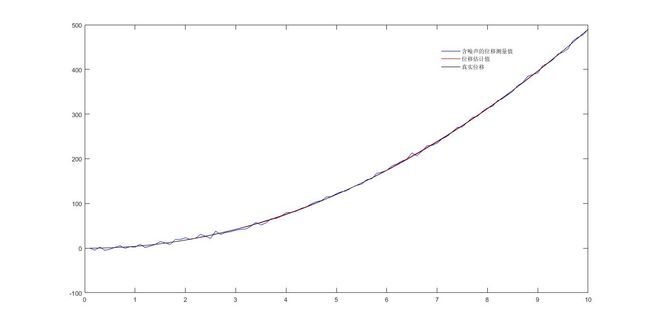
注:Eigen矩阵运算库的使用,从官网下载zip压缩包,解压,在工程项目,VC++目录,包含目录中添加解压的文件夹所在目录即可