人脸3D重建ECCV2018PRNet论文解读
人脸3D重建ECCV2018PRNet论文解读
github地址:https://github.com/leoluopy/paper_discussing/blob/master/body/PRNet/PRNet.md
Overview
- 端到端的人脸3D重建模型,同时直接预测人脸的【实际上就是UV空间预测并直接解码,UV空间后面叙述】
以前的模型或者需要首先回归3DMM参数来计算3D空间,或者需要回归特征3D点随后进行非线性优化获取3DMM参数,随后使用3DMM参数来得到稠密的人脸模型,这些方法都是基于3DMM模型的。 当然也有2D的方法,先回归得到2D的不少坐标点,并预测深度图,根据深度度和2D点重建稠密3D人脸
- 这个模型做到了在1080的显卡上仅仅需要 9ms的速率,相对于之前的各种方法有了很明显的提升,同时在评判指标CED,NME上也有显著的提升
NME : normalised mean error : 归一化的,参考长度的坐标偏差衡量指标,用来评判人脸关键点回归质量的重要指数
CED : NME和数据集比例曲线,衡量在NME达到一定错误率时,已经覆盖的数据集比例,模型的鲁棒性指标
效果概览

- 人脸关键点和3D重建结构效果

- PRNet 根据人脸关键3D位置及其相应纹理,进行的换脸术。

- PRNet重建的稠密3D人脸
UV 空间

- 左图是二维人脸图片以及对应的稠密3D点云。
- 右图是UV空间表示。
第一排第一张是原始图片,第一排第二张是将人脸RGB通道映射到UV空间的对应位置【UV空间纹理图】,第一排第三张是UV空间位置图,每个通道表示对应纹理的xyz。
第二排是 UV空间的位置图三个通道的展开。 GT 就是UV位置空间,在代码中维度是(256,256,3)
网络结构

def resBlock(x, num_outputs, kernel_size = 4, stride=1, activation_fn=tf.nn.relu, normalizer_fn=tcl.batch_norm, scope=None):
assert num_outputs%2==0 #num_outputs must be divided by channel_factor(2 here)
with tf.variable_scope(scope, 'resBlock'):
shortcut = x
if stride != 1 or x.get_shape()[3] != num_outputs:
shortcut = tcl.conv2d(shortcut, num_outputs, kernel_size=1, stride=stride,
activation_fn=None, normalizer_fn=None, scope='shortcut')
x = tcl.conv2d(x, num_outputs/2, kernel_size=1, stride=1, padding='SAME')
x = tcl.conv2d(x, num_outputs/2, kernel_size=kernel_size, stride=stride, padding='SAME')
x = tcl.conv2d(x, num_outputs, kernel_size=1, stride=1, activation_fn=None, padding='SAME', normalizer_fn=None)
x += shortcut
x = normalizer_fn(x)
x = activation_fn(x)
return x
残差结构实现,如上激活是relu,归一化是BN,shortcut对应三次卷积,随后通道合并,最后归一化和激活。
size = 16
# x: s x s x 3
se = tcl.conv2d(x, num_outputs=size, kernel_size=4, stride=1) # 256 x 256 x 16
se = resBlock(se, num_outputs=size * 2, kernel_size=4, stride=2) # 128 x 128 x 32
se = resBlock(se, num_outputs=size * 2, kernel_size=4, stride=1) # 128 x 128 x 32
se = resBlock(se, num_outputs=size * 4, kernel_size=4, stride=2) # 64 x 64 x 64
se = resBlock(se, num_outputs=size * 4, kernel_size=4, stride=1) # 64 x 64 x 64
se = resBlock(se, num_outputs=size * 8, kernel_size=4, stride=2) # 32 x 32 x 128
se = resBlock(se, num_outputs=size * 8, kernel_size=4, stride=1) # 32 x 32 x 128
se = resBlock(se, num_outputs=size * 16, kernel_size=4, stride=2) # 16 x 16 x 256
se = resBlock(se, num_outputs=size * 16, kernel_size=4, stride=1) # 16 x 16 x 256
se = resBlock(se, num_outputs=size * 32, kernel_size=4, stride=2) # 8 x 8 x 512
se = resBlock(se, num_outputs=size * 32, kernel_size=4, stride=1) # 8 x 8 x 512
pd = tcl.conv2d_transpose(se, size * 32, 4, stride=1) # 8 x 8 x 512
pd = tcl.conv2d_transpose(pd, size * 16, 4, stride=2) # 16 x 16 x 256
pd = tcl.conv2d_transpose(pd, size * 16, 4, stride=1) # 16 x 16 x 256
pd = tcl.conv2d_transpose(pd, size * 16, 4, stride=1) # 16 x 16 x 256
pd = tcl.conv2d_transpose(pd, size * 8, 4, stride=2) # 32 x 32 x 128
pd = tcl.conv2d_transpose(pd, size * 8, 4, stride=1) # 32 x 32 x 128
pd = tcl.conv2d_transpose(pd, size * 8, 4, stride=1) # 32 x 32 x 128
pd = tcl.conv2d_transpose(pd, size * 4, 4, stride=2) # 64 x 64 x 64
pd = tcl.conv2d_transpose(pd, size * 4, 4, stride=1) # 64 x 64 x 64
pd = tcl.conv2d_transpose(pd, size * 4, 4, stride=1) # 64 x 64 x 64
pd = tcl.conv2d_transpose(pd, size * 2, 4, stride=2) # 128 x 128 x 32
pd = tcl.conv2d_transpose(pd, size * 2, 4, stride=1) # 128 x 128 x 32
pd = tcl.conv2d_transpose(pd, size, 4, stride=2) # 256 x 256 x 16
pd = tcl.conv2d_transpose(pd, size, 4, stride=1) # 256 x 256 x 16
pd = tcl.conv2d_transpose(pd, 3, 4, stride=1) # 256 x 256 x 3
pd = tcl.conv2d_transpose(pd, 3, 4, stride=1) # 256 x 256 x 3
pos = tcl.conv2d_transpose(pd, 3, 4, stride=1, activation_fn = tf.nn.sigmoid)
网络结构如上图所示,有两部分组成,网络残差和反卷积。最后激活使用sigmoid得到输出UV空间。
Loss设计


- P(x,y) 是UV位置空间的预测结果,表征了UV图上对应像素的xyz位置
- W(x,y) 是UV位置空间的权重,对UV空间进行权重控制,关键点:眼鼻嘴:脸部其他:其他 = 16:4:3:0
训练细节
- 训练数据来源: 使用了300W-LP数据集,
- 拥有各个角度的人脸数据,使用时scale到256x256
- 3DMM系数的标注
- 使用3DMM 生成3D点云,并转换3D点云至UV空间
注: 虽然生成GT使用了3DMM的标注系数,但是模型本身不包含3DMM模型的任何线性约束.
- 数据增广包含了所有的困难场景:
- 角度变换 -45 ~ 45 度
- 平移系数 0.9 ~ 1.2 (原图大小为基数)
- 颜色通道变换 0.6 ~ 1.4
- 添加噪音纹理遮挡,模拟真实情况遮挡.
- adam优化器,初始学习率0.0001,每5个epoch,衰减1半,batch size:16
测试结果


- 上面两图记录了68个关键点和所有点的CED曲线走向情况,总的来说都有不少提升.

- 角度变化情况下的,3D人脸关键点的NME效果对比

- 上图使用了瞳间距作为归一化分母,这样更加形象的表达了算法效果.

- 推理时间[1080显卡]
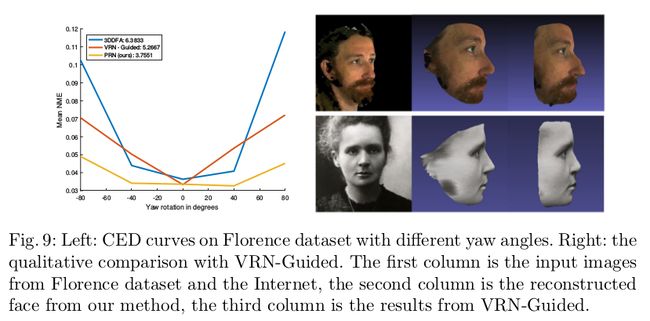
- 与各种方法比如VRN在不同角度下,和3d稠密重建效果的对比.

- 部分推理结果超过GT,训练过程忽略掉的GT噪声