《白话强化学习与PyTorch》学习笔记---第八章
第八章---DQN算法族
- 1. 概述
- 2. Pong环境选择及处理
- 3. 图片处理
- 4. 网络架构
- 5. DQN算法族
- nips-dqn
- nature-dqn
- double-dqn
- dueling-dqn
- 6. 仿真分析
该部分完整代码在此:https://github.com/catziyan/DRLPytorch-/tree/master/08
1. 概述
第八章用了nips-DQN、nature-DQN、double-DQN、dueling DQN四种算法来训练Gym中的atari游戏—pong,就是控制球拍与电脑玩乒乓球,电脑丢球,reward为1;(自己)丢球,reward为-1;其余reward为0。某一方获得21分后游戏结束,done为True。游戏很简单,单作为小白初学就上手atari游戏,还是很折腾。先说说这本书在这一章中的一些坑,希望能给正在或则将要学习这本书的小伙伴一点帮助,其余朋友可以跳过这一部分。
- 书中提供的这一章的代码可以说是一个都不能用,主要原因是对环境没有任何处理且输入神经网络的图片为单帧图片,这样无法判断乒乓球的运动方向,其次对图片的处理有问题,因threshold中的阈值选择的不对而导致处理后的图片为全白(值全都为255,这怎么可能训练出来呢…),最后探索率每次更新下降太慢,书中代码要1000000个回合探索率才能从1.0降到0.1,而我国庆运行七天才训练了3000个回合,并且综上可想而知训练结果很糟糕。
- 书中202页中Double DQN 的伪代码及讲解错误,要学习的朋友注意不要被误导,具体可以参考刘建平老师的文章或则原论文(Deep Reinforcement Learning with Double Q-learning)
PS:因为本书是今天9月份才出版…一些印刷错误和不足在所难免,书还是很有学习价值的…
2. Pong环境选择及处理
在gym的官方网站中能够找到两款关于pong的游戏介绍,一个是Pong-ram-v0(观察到的是Atari机器的RAM,包含128个字节)另一个是Pong-v0(观察结果为RGB图像,大小为(210,160,3)),一般选择以图像作为神经网络的输入,下图为官方介绍:
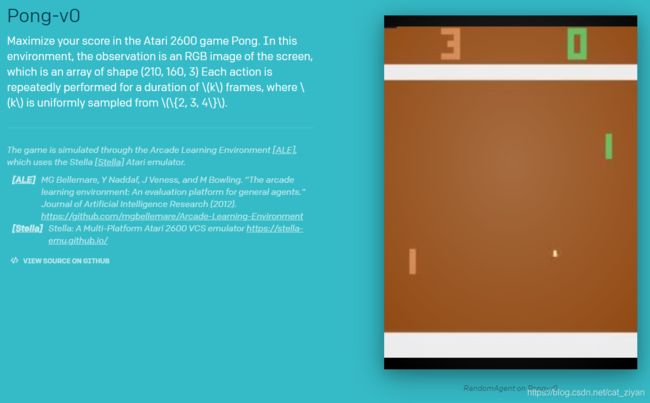
翻译过来为:训练目的是使得分最大化。在这个环境中的观察结果(observation)是RGB图像,大小为(210,160,3),在2~4(随机采样)帧内重复同一个动作。
最开始看环境介绍并没有发现问题,直接用该环境进行训练,结果训练结果并不理想,后面参考这篇博客发现了问题所在:
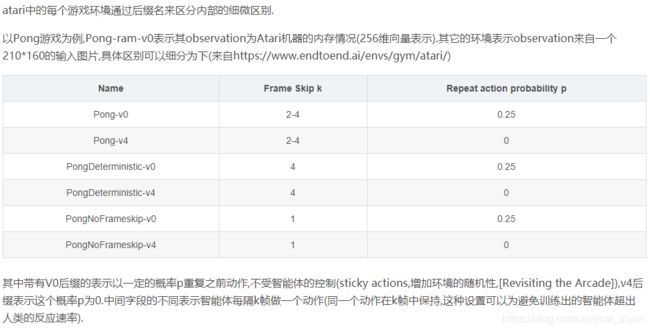
可以看出若使用Pong-v0进行训练将存在两个不确定性:
- Frame Skip k是随机的(这样会使得状态空间增加,增加了训练难度)
- 会有0.25的概率不执行智能体这次输出的动作,保持上一回的动作(训练时已经设置了探索率,所以并不希望有这个概率存在…)
所以要么需要对Pong-v0环境重新经行更改封装(网上很多都是写一个wrappers),要么选择一个合适的环境,对于小白的我来说,还要研究环境封装也太难了(┭┮﹏┭┮),故我分别用了PongDeterministic-v4和PongNoFrameskip-v4进行训练,都可。其中PongDeterministic-v4在博客所提到的网站(https://www.endtoend.ai/envs/gym/atari/)写到:Deterministic-v4 is the configuration used to assess Deep Q-Networks.所以该环境为首选,其次PongNoFrameskip-v4可以手动写代码进行跳帧处理,同样简单可行。
ps:我们认为这个游戏只能有向上或者向下两个动作,但在研究过程中,打印env.action_space.n的结果为6,这是由于这款atari游戏环境中设定当action为0和1的时候球拍不动,为2和4的时候球拍向上运动,为3和5的时候向下运动。
3. 图片处理
图片处理主要分为两个部分—压缩为灰度图和将连续四帧堆叠在一起,在util.py文件中
def preprocess(observation):
img = np.reshape(observation,[210,160,3]).astype(np.float32)
# RGB转换成灰度图像的一个常用公式是:ray = R*0.299 + G*0.587 + B*0.114
img = img[:, :, 0] * 0.299 + img[:, :, 1] * 0.587 + img[:, :, 2] * 0.114 #shape (210,160)
resized_screen = cv2.resize(img, (84, 110), interpolation=cv2.INTER_AREA) # shape(110,84)
x_t = resized_screen[18:102,:]
x_t = np.reshape(x_t,[84,84,1])
x_t.astype((np.uint8))
x_t = np.moveaxis(x_t, 2, 0) #shape(1,84,84)
return np.array(x_t).astype(np.float32) / 255.0
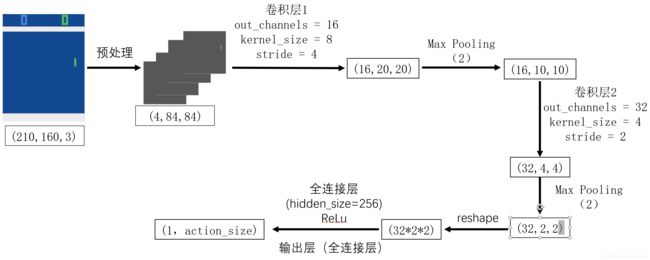
采用论文Playing Atari with Deep Reinforcement Learning所提到的卷积神经网络架构
需要注意几点:
- cv2.resize(image, (width(列), height(行))) 是将图片进行压缩操作,第一个参数为列,第二个参数为行,所以压缩完后为(110,84)
- 还可以用cv2.cvtColor(image, cv2.COLOR_BGR2GRAY) 将图片转换成灰度图(值会有所不同),此时已将图片的大小从三维转换成二维。
- x_t = resized_screen[18:102,:]为截取压缩后的图片,去掉图片上方比分信息及上边界和下边界这些无用信息
最初的图片和处理后的图片对比如下


叠加操作:将连续的进过处理后的四帧图片叠在一起作为神经网络的输入,(不要与跳帧搞混了,这里是连续的四个observation),大小为(4,84,84)
-
先将初始化后状态重复4下存入state_shadow里
state = env.reset() state = preprocess(state) state = np.reshape(state, (84, 84)) state_shadow = np.stack((state,state,state,state),axis=0) -
每次得到一个新的next_state,再和原state_shadow里的后3个状态一起组成一个新的next_state_shadow
next_state, reward, done, info = env.step(action) reward_real = reward next_state = preprocess(next_state) next_state_shadow = np.append( next_state, state_shadow[:3,:,:],axis=0)
4. 网络架构
参考论文Playing Atari with Deep Reinforcement Learning中的架构,两个卷积层加一个全连接层,如下图所示。神经网络的学习可以参考我的上一篇读书笔记,《白话强化学习与PyTorch》学习笔记—第六章
所对应的代码部分在net.py文件里,如下:
class CnnDQN(nn.Module):
def __init__(self, inputs_shape, num_actions):
super(CnnDQN, self).__init__()
self.inut_shape = inputs_shape
self.num_actions = num_actions
self.features = nn.Sequential(
nn.Conv2d(inputs_shape[0], 16, kernel_size=8, stride=4),
nn.MaxPool2d(2),
nn.Conv2d(16, 32, kernel_size=4, stride=2),
nn.MaxPool2d(2),
)
self.fc = nn.Sequential(
nn.Linear(self.features_size(), 256),
nn.ReLU(),
nn.Linear(256, self.num_actions)
)
def forward(self, x):
x = self.features(x)
x = x.view(x.size(0), -1)
x = self.fc(x)
return x
def features_size(self):
return self.features(torch.zeros(1, *self.inut_shape)).view(1, -1).size(1)
5. DQN算法族
关于DQN算法原理介绍的有很,详细可以看刘建平老师的博客,写的非常好!(感觉我已经变成了他的小迷妹)这里我只是简单介绍一下算法流程,因为我提供的代码是将这几种算法写在了一个.py文件中(略微有点混乱),所以简单介绍一下程序里对应的代码实现。
nips-dqn
nips-dqn是在2013年出现的最早的dqn算法,它将传统的强化学习算法q-learning与神经网络相结合,将状态向量作为神经网络的输入,输出得到相应状态每一个动作的价值,DQN解决了高维训练的问题,算法实现流程如下:
初始化经验回放集合 D D D及容量 N N N
初始化 Q Q Q网络
for e p i s o d e = 1 , M episode = 1 ,M episode=1,M do (一个 e p i s o d e episode episode就代表该游戏中有一方得了21分)
初始化环境状态,得到环境的第一个状态 s 1 s_1 s1,将其处理为状态向量 ϕ 1 \phi_1 ϕ1(即图像处理过程,处理为神经网络的输入);
for t = 1 , T t=1,T t=1,T do
以 ϵ \epsilon ϵ的概率选择一个随机动作 a t a_t at,否则选择 a t = m a x a Q ∗ ( ϕ ( s t ) , a ; θ ) a_t=max_aQ^*(\phi(s_t),a;\theta) at=maxaQ∗(ϕ(st),a;θ)
在环境中执行动作 a t a_t at并且得到奖励值 r t r_t rt和下一时刻的状态 s t + 1 s_{t+1} st+1,以及是否为终止状态 d o n e done done
将状态 s t + 1 s_{t+1} st+1处理为状态向量 ϕ t + 1 \phi_{t+1} ϕt+1
将( ϕ t , a t , r t , ϕ t + 1 , d o n e \phi_t,a_t,r_t,\phi_{t+1},done ϕt,at,rt,ϕt+1,done)这五个元素存入经验回访集合 D D D
从 D D D中随机采样 m i n i b a t c h ( m ) minibatch(m) minibatch(m)个样本,用来计算目标 Q Q Q值 y j y_j yj
y j = { R j done=True R j + γ m a x a ′ Q ( ϕ j + 1 , a ′ ; θ ) done=False y_j= \begin{cases} R_j & \text{done=True}\\ R_j+\gamma max_{a'}Q(\phi_{j+1},a';\theta) &\text{done=False} \end{cases} yj={RjRj+γmaxa′Q(ϕj+1,a′;θ)done=Truedone=False
使用均方差损失函数 1 m ∑ j = 1 m ( y j − Q ( ϕ j , a j ; θ ) ) \frac{1}{m}\sum_{j=1}^m (y_j-Q(\phi_j,a_j;\theta)) m1∑j=1m(yj−Q(ϕj,aj;θ))更新神经网络参数
如果 d o n e = T r u e done =True done=True,跳出本循环,进行下一个 e p i s o d e episode episode
在DQN.py文件中,在Class agent中的learn函数中:
# dqn
next_q = self.tar_net(next_state).detach()
target_q = reward + GAMMA * next_q.max(1)[0].view(BATCH_SIZE, 1) * done
这里就是对目标 Q Q Q值的计算,其中当算法中的 d o n e = T r u e done=True done=True时,此时程序中的 d o n e = 0 done=0 done=0
在class agent中定义了两个网络,一个是self.network,一个是self.tar_net,可以发现2013版算法只有一个 Q Q Q网络,所以需要将超参数UPDATA_FREQUENCY设置为1,这样self.network=self.tar_net(具体会在nature-dqn部分讲到)
以上就是nips-DQN的整个算法流程,下面的都是在该DQN算法上的变型
nature-dqn
2015年出现的nature-dqn相比于2013版的dqn有一次重大的改造,就是将一个网络变成了二个网络,出现了主网络和目标网络的概念,可以先看一下算法流程,与2013版不一样的地方下面将标记成红色
初始化经验回放集合 D D D及容量 N N N
初始化当前 Q Q Q网络参数 w w w,目标 Q Q Q网络参数 w ′ w' w′,网络参数 w = w ′ w=w' w=w′,目标网络更新频率 C C C
for e p i s o d e = 1 , M episode = 1 ,M episode=1,M do (一个 e p i s o d e episode episode就代表该游戏中有一方得了21分)
初始化环境状态,得到环境的第一个状态 s 1 s_1 s1,将其处理为状态向量 ϕ 1 \phi_1 ϕ1(即图像处理过程,处理为神经网络的输入);
for t = 1 , T t=1,T t=1,T do
以 ϵ \epsilon ϵ的概率选择一个随机动作 a t a_t at,否则选择 a t = m a x a Q ∗ ( ϕ ( s t ) , a ; θ ) a_t=max_aQ^*(\phi(s_t),a;\theta) at=maxaQ∗(ϕ(st),a;θ)
在环境中执行动作 a t a_t at并且得到奖励值 r t r_t rt和下一时刻的状态 s t + 1 s_{t+1} st+1,以及是否为终止状态 d o n e done done
将状态 s t + 1 s_{t+1} st+1处理为状态向量 ϕ t + 1 \phi_{t+1} ϕt+1
将( ϕ t , a t , r t , ϕ t + 1 , d o n e \phi_t,a_t,r_t,\phi_{t+1},done ϕt,at,rt,ϕt+1,done)这五个元素存入经验回访集合 D D D
从 D D D中随机采样 m i n i b a t c h ( m ) minibatch(m) minibatch(m)个样本,用来计算目标 Q Q Q值 y j y_j yj
y j = { R j done=True R j + γ m a x a ′ Q ( ϕ j + 1 , a ′ , θ ′ ) done=False y_j= \begin{cases} R_j & \text{done=True}\\ R_j+\gamma max_{a'}Q(\phi_{j+1},a', \theta') &\text{done=False} \end{cases} yj={RjRj+γmaxa′Q(ϕj+1,a′,θ′)done=Truedone=False
(注意:计算 y i y_i yi的网络参数为 θ ′ \theta' θ′,即使用的是目标 Q Q Q网络)
使用均方差损失函数 1 m ∑ j = 1 m ( y j − Q ( ϕ j , a j ; θ ) ) \frac{1}{m}\sum_{j=1}^m (y_j-Q(\phi_j,a_j;\theta)) m1∑j=1m(yj−Q(ϕj,aj;θ))更新当前神经网络参数 w w w
如果 T / C = 1 T/C=1 T/C=1,更新目标网络参数 w ′ w' w′
如果 d o n e = T r u e done =True done=True,跳出本循环,进行下一个 e p i s o d e episode episode
可以看出,nature-dqn就是新增加一个目标网络来计算目标 Q Q Q值 y i y_i yi,若 C = 1 C=1 C=1,则就变为2013版dqn。可以看出,nature-dqn减少了目标 Q Q Q值计算和主网络之间的依赖关系,可以使主网络收敛平稳一些。
看到这儿大家应该就会恍然大悟,上面提到的超参数UPDATA_FREQUENCY就是算法中的 C C C,因此程序中要实现nips-dqn和nature-dqn的切换只需要改变UPDATA_FREQUENCY,我设置的为1000
double-dqn
double-dqn是在nature-dqn的基础上做了进一步改变,它同样有两个 Q Q Q网络,但计算目标 Q Q Q值 y i y_i yi有所不同(当 d o n e = F a l s e done=False done=False不同)。
nature-dqn计算 Q Q Q值的式子为:
R j + γ m a x a ′ Q ( ϕ j + 1 , a ′ , θ ′ ) R_j+\gamma max_{a'}Q(\phi_{j+1},a', \theta') Rj+γmaxa′Q(ϕj+1,a′,θ′)
即当前时刻的奖励 R j R_j Rj加上 γ \gamma γ乘以 在目标 Q Q Q网络( θ ′ \theta' θ′)中 的下一时刻的状态 所对应的所有动作 Q Q Q值中的最大值。
而double-dqn计算 Q Q Q值的式子为:
R j + γ Q ′ ( ϕ j + 1 , a r g m a x a ′ Q ( ϕ j + 1 , a ′ , θ ) , θ ′ ) R_j+\gamma Q'(\phi_{j+1},arg max_{a'}Q(\phi_{j+1},a', \theta),\theta') Rj+γQ′(ϕj+1,argmaxa′Q(ϕj+1,a′,θ),θ′)
看着是要复杂了一些,可以分为两步来看, a r g m a x a ′ Q ( ϕ j + 1 , a ′ , θ ) arg max_{a'}Q(\phi_{j+1},a', \theta) argmaxa′Q(ϕj+1,a′,θ)为在当前网络( θ \theta θ)中找到下一时刻最大 Q Q Q值所对应的动作( a ′ a' a′),然后在目标网络( θ ′ \theta' θ′)中计算下一时刻,动作( a ′ a' a′)所对应的目标 Q Q Q值。
除了上述计算 y i y_i yi与nature-dqn有所不同,其余都一样,故就不在写算法流程了,直接看代码:
# dqn
# next_q = self.tar_net(next_state).detach()
# target_q = reward + GAMMA * next_q.max(1)[0].view(BATCH_SIZE, 1) * done
## double-dqn
actions_value = self.network.forward(next_state)
next_action = torch.unsqueeze(torch.max(actions_value, 1)[1], 1)
next_q = self.tar_net.forward(next_state).gather(1, next_action)
target_q = reward + GAMMA * next_q * done
上面注释的部分是刚才的nature-dqn,下面是double-dqn,是不是double-dqn也没有多几行代码咧。代码就是上述公式的实现,就不再赘述了,double-dqn的优势为在一定程度上降低了发生过估计的可能性。
dueling-dqn
前面两种都是对算法的优化,dueling-dqn是对神经网络的优化,之前的神经网络都是输入当前的状态,就直接得到当前状态所有动作所对应的 Q Q Q值,而dueling-dqn将网络分为了两个部分,先看一下论文中的网络结构对比图:
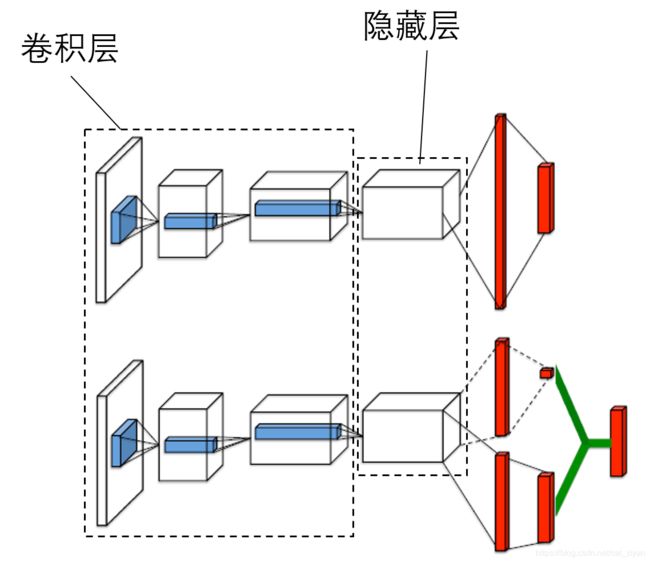
可以看出,dueling-dqn在隐藏层之后将网络分为了两个部分,前面的网络是共享的(网络参数为 w w w),后面的网络则各有各的待定系数,其中一个是价值函数 V ( S ; w , α ) V(S;w,\alpha) V(S;w,α),它只与当前时刻的状态有关,故输出大小为1,网络系数为( α \alpha α);另一个是优势函数 A ( S , a ; w , β ) A(S,a;w,\beta) A(S,a;w,β),它不仅与当前时刻的状态有关,还与动作有关,故输出大小为动作个数(action_size),其网络系数为( β ) \beta) β)。最后为了辨识最终输出里面价值函数和优势函数各自所起的作用,对优势函数部分做了中心化处理,有两种处理形式,最终 Q Q Q网络的输出为下式:
Q ( S , a ; w , α , β ) = V ( S ; w , α ) + ( A ( S , a ; w , β ) − 1 ∣ A ∣ ∑ a ′ A ( S , a ′ ; w , β ) ) Q(S,a;w,\alpha,\beta)=V(S;w,\alpha)+(A(S,a;w,\beta)-\frac{1}{|A|}\sum_{a'}A(S,a';w,\beta)) Q(S,a;w,α,β)=V(S;w,α)+(A(S,a;w,β)−∣A∣1a′∑A(S,a′;w,β))
Q ( S , a ; w , α , β ) = V ( S ; w , α ) + ( A ( S , a ; w , β ) − m a x a ′ ∈ ∣ A ∣ A ( S , a ′ ; w , β ) ) Q(S,a;w,\alpha,\beta)=V(S;w,\alpha)+(A(S,a;w,\beta)-max_{a'\in|A|} A(S,a';w,\beta)) Q(S,a;w,α,β)=V(S;w,α)+(A(S,a;w,β)−maxa′∈∣A∣A(S,a′;w,β))
因为dueling-dqn是对网络结构的优化,故现有的DQN算法可以在使用Duel DQN网络结构的基础上继续使用现有的算法。由于算法主流程和其他算法没有差异,这里就不讲算法流程了,直接看代码:
class DuelingNet(nn.Module):
def __init__(self, inputs_shape, num_actions):
super(DuelingNet, self).__init__()
self.input_shape = inputs_shape
self.num_actions = num_actions
self.features = nn.Sequential(
nn.Conv2d(inputs_shape[0], 16, kernel_size=8, stride=4),
nn.MaxPool2d(2),
nn.Conv2d(16,32,kernel_size=4, stride=2),
nn.MaxPool2d(2)
)
self.hidden = nn.Sequential(
nn.Linear(self.features_size(), 256, bias=True),
nn.ReLU()
)
self.adv = nn.Linear(256, num_actions, bias=True)
self.val = nn.Linear(256, 1, bias=True)
def forward(self, x):
x = self.features(x)
x = x.view(x.size(0), -1)
x = self.hidden(x)
adv = self.adv(x)
val = self.val(x).expand(x.size(0),self.num_actions) #扩展某个size为1的维度,值一样 (1,6)
x = val + adv -adv.mean(1).unsqueeze(1).expand(x.size(0),self.num_actions)
return x
def features_size(self):
return self.features(torch.zeros(1, *self.input_shape)).view(1, -1).size(1)
可以看出它与上面网络结构的代码部分不同点在于多了两个self.adv和self.val线性输出层,最后的输出x为adv和val的线性组合。
dueling-dqn使用了一种比较巧妙的方式将动作本身和状态本身的价值解耦。书里有段话对dueling-dqn的理解特别生动形象:在评估下棋的策略时——有的盘面本身价值很高,也就是说,眼看就要赢了,走哪一步都差不多;有的盘面一般,状态胶着,局势不明朗,但是一些步子走出来价值就很高,步子与步子之间的估值差异比较大。这种解耦的假设,也会帮助网络学到更为准确的状态价值估值,从而更有效的找到好的策略。
6. 仿真分析
后面的仿真分析主要是为了解决我一个疑惑。
前面讲到该游戏当某一方得分21分时,环境输出的done才为True,即改状态的Q值计算采用 y j = R j y_j=R_j yj=Rj:
程序中体现在将那五个元素存入经验回放集合 D D D中时的操作:
if done:
self.memory.append((state, action, reward, next_state, 0))
else:
self.memory.append((state, action, reward, next_state, 1))
即若done=True,则存入0,待会儿计算的时候乘以0,就只剩下 y j = R j y_j=R_j yj=Rj了。
但是是否可以将某一方丢球后,done就等于True呢?因为此刻该状态理论上也可以看做是中止状态(因为新的一次发球将开始) ,即当|reward|=1时,就存入0:
if reward==0:
self.memory.append((state, action, reward, next_state, 1))
else:
self.memory.append((state, action, reward, next_state, 0))
后面进行了一下验证:
使用的算法为nature-dqn,先看一下其余参数设置:
epsilon 经过10万帧后从1下降到0.02
batch_size = 32
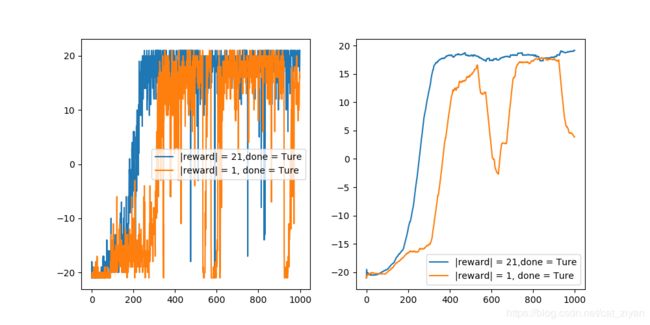
左图为每一回合的得分,右图为100个回合的平均值,可以看出,当 |reward| = 1时,收敛性特别差!
但这是否意味着以丢球作为结束判断不可行呢?我思考了一下会不会是学习率的原因。下图当|reward| = 1,done=True时,改变学习率后的对比图
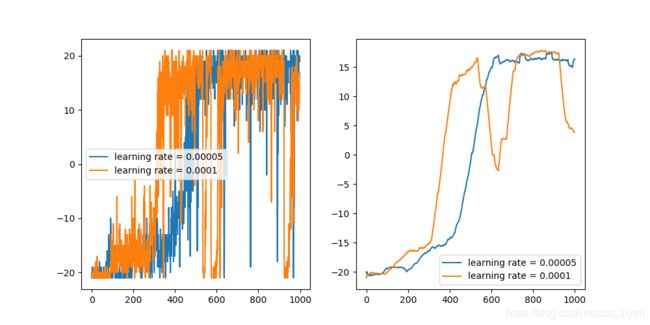
可以看出当学习率为0.00005时,虽然学习的比较慢,但是确实更稳定了,也就是说还是可以收敛的,除此之外,因为探索率 ϵ \epsilon ϵ为0.02,非常小,所有还有可能很多随机情况出现的时候,一些策略并没有学习到,所以导致会连续丢球。
下面我使用double-dqn结合dueling-dqn的算法, ϵ = 0.05 , l r = 0.0001 \epsilon=0.05,lr=0.0001 ϵ=0.05,lr=0.0001,|reward| = 1,done=True结果如下所示:
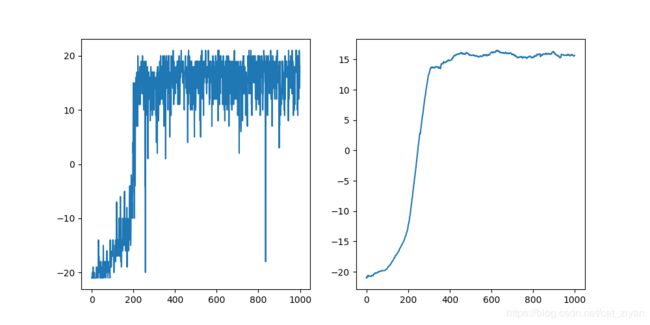
可以看出结果也可以收敛。所以改变结束判断依据时,需要相应的适当调整参数。