用Verilog代码实现一个简易的SPI从机接口
SPI可以作为FPGA与其它芯片之间一种简单有效的通信方式。
SPI 1 - 什么是 SPI?
SPI是一个简单的接口,允许一个芯片与一个或多个其他芯片通信。
看上去怎么样?
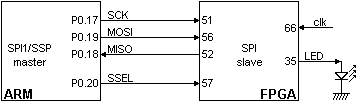
让我们从一个简单的例子开始,其中只有两个芯片必须通信在一起。
SPI需要在两片芯片之间使用4根线。
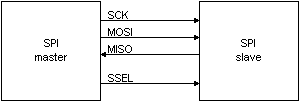
正如您所看到的,这些线被称为SCK、MOSI、MISO和SSEL,其中一个芯片被称为SPI MASTER主芯片,而另一个芯片称为SPI SLAVE。
SPI基础
基本上:
- 它是同步的。
- 是全双工系列。
- 这不是即插即用。
- 有一个(而且只有一个)master和一个(或更多)slave。
详情如下:
- 同步:时钟由主控制器产生。
- 全双工串行:数据被串行化,在每个时钟周期内每个方向传输一位数据,因此使用两条数据线(MOSI和MISO)。
- 不是即插即用:主从双方事先知道通信的细节(位顺序、交换数据的长度等)。
- 一个主从:从不能发起通信,只有主可以。从接收并回应。
简单传输
让我们假设主从期望传输8位数据,首先传输MSB。
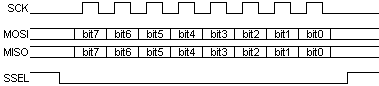
MOSI行是“主输出”,MISO是“从输出”。由于SPI是全双工,两行同时切换,不同的数
据从主从和从到主。
详情如下:
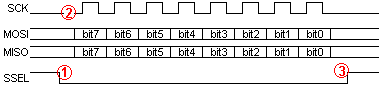
- 主从将SSEL拉低,以指示通信正在启动(SSEL处于低活动状态)。
- 主切换时钟8次,在其MOSI线路上发送8位数据。同时,它从MISO线路上的从站接收8个数据位。
- 主拉起SSEL表示转移已经结束。
如果主机有多个8位数据要发送/接收,则只有在一次传输完成后才能继续发送/接收。
多个从设备
SPI主机可以通过两种方式与多路从设备进行通信:通过并联连接添加更多SSEL线,或者通过将从设备链接起来的方式。
使用多条SSEL的方式,一次只能激活一条SSEL,而未被选择的从设备不能驱动MISO线。
有多快?
SPI可以轻松地实现几Mbps(兆位每秒)。这意味着它可以用于未压缩音频或压缩视频。
SPI 2 - 一个简单的实现
SPI从HDL FPGA码
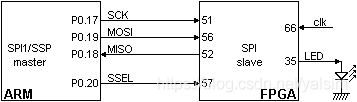
现在用于FPGA中的SPI从站。
由于SPI总线通常比FPGA工作时钟慢得多,所以我们选择使用FPGA时钟对SPI总线进行过采样。这使得从代码稍微复杂一些,但它的优点是在FPGA时钟域中运行SPI逻辑,这
将使以后的工作变得更容易。
首先是模块声明。
module SPI_slave(clk, SCK, MOSI, MISO, SSEL, LED);
input clk;
input SCK, SSEL, MOSI;
output MISO;
output LED;
请注意,我们有“CLK”(FPGA时钟)和一个LED输出。一个不错的调试工具。“CLK”需要
比SPI总线更快。
我们使用FPGA时钟和移位寄存器对SPI信号(SCK、SSEL和MOSI)进行采样/同步。
// sync SCK to the FPGA clock using a 3-bits shift register
reg [2:0] SCKr; always @(posedge clk) SCKr <= {SCKr[1:0], SCK};
wire SCK_risingedge = (SCKr[2:1]==2'b01); // now we can detect SCK rising edges
wire SCK_fallingedge = (SCKr[2:1]==2'b10); // and falling edges
// same thing for SSEL
reg [2:0] SSELr; always @(posedge clk) SSELr <= {SSELr[1:0], SSEL};
wire SSEL_active = ~SSELr[1]; // SSEL is active low
wire SSEL_startmessage = (SSELr[2:1]==2'b10); // message starts at falling edge
wire SSEL_endmessage = (SSELr[2:1]==2'b01); // message stops at rising edge
// and for MOSI
reg [1:0] MOSIr; always @(posedge clk) MOSIr <= {MOSIr[0], MOSI};
wire MOSI_data = MOSIr[1];
现在从SPI总线接收数据很容易。
// we handle SPI in 8-bits format, so we need a 3 bits counter to count the bits as they come in
reg [2:0] bitcnt;
reg byte_received; // high when a byte has been received
reg [7:0] byte_data_received;
always @(posedge clk)
begin
if(~SSEL_active)
bitcnt <= 3'b000;
else
if(SCK_risingedge)
begin
bitcnt <= bitcnt + 3'b001;
// implement a shift-left register (since we receive the data MSB first)
byte_data_received <= {byte_data_received[6:0], MOSI_data};
end
end
always @(posedge clk) byte_received <= SSEL_active && SCK_risingedge && (bitcnt==3'b111);
// we use the LSB of the data received to control an LED
reg LED;
always @(posedge clk) if(byte_received) LED <= byte_data_received[0];
最后是传输部分。
reg [7:0] byte_data_sent;
reg [7:0] cnt;
always @(posedge clk) if(SSEL_startmessage) cnt<=cnt+8'h1; // count the messages
always @(posedge clk)
if(SSEL_active)
begin
if(SSEL_startmessage)
byte_data_sent <= cnt; // first byte sent in a message is the message count
else
if(SCK_fallingedge)
begin
if(bitcnt==3'b000)
byte_data_sent <= 8'h00; // after that, we send 0s
else
byte_data_sent <= {byte_data_sent[6:0], 1'b0};
end
end
assign MISO = byte_data_sent[7]; // send MSB first
// we assume that there is only one slave on the SPI bus
// so we don't bother with a tri-state buffer for MISO
// otherwise we would need to tri-state MISO when SSEL is inactive
endmodule
当我们通过调试时,我们可以看到LED的变化状态,以及FPGA返回的数据。
现在让我们看看我们是否可以用SPI做一些有用的事情。
SPI 3 - 应用
代码