RealSense D435 输出世界坐标系的csv文件
第一篇博客,最近在实习,一直在做机器视觉的研究。今天简单的介绍一个RealsenseD435的应用。
RealsenseD435是一款深度摄像头,可以快读的输出深度图像。首先了解一下什么事世界坐标系,相机坐标系,和图像坐标系,这里给大家推荐一篇博客。https://blog.csdn.net/waeceo/article/details/50580607
在Viewer里我们可以很轻松地得到相机坐标系下的深度图。但是在应用中我们有时候会需要世界坐标系下的深度图,这种时候就需要进行坐标系转换。

而且Realsense只能输出.ply的深度图,我(其实是boss)更想得到csv结果,以方便后续利用点云进行数据处理。
那么不多废话,如何得到世界坐标系下的csv三维坐标图呢?
std::ofstream outFile_original;
std::stringstream csv_file_original;
csv_file_original << "Original rs-save-to-disk-output-" << count_image << "-metadata.csv";
outFile_original.open(csv_file_original.str(), std::ios::app);
outFile_original << "X" << ';' << "Y" << ';' << "Z" << ';' << "scalar_X" << ';' << "scalar_Y" << ';' << "scalar_Z" << std::endl;这是csv文件的表头,方便我们用pointcloud读取文件进行操作。
然后遍历深度图每一个pixel,根据公式求出该点的三维世界坐标系。

这是我的读取深度图,然后利用深度值得到点的三维坐标(相机坐标系)转换得到世界坐标系
static void Hauteur_Y(const rs2_intrinsics& intr, const rs2::depth_frame& frame, pixel u, std::ofstream *outFile, double H, double D, double angle, float wpoint[3],double dis_max,double dis_min)
{
float upixel[2]; // From pixel
float upoint[3]; // From point (in 3D)
float xpoint[3];
float extrin[4][4] = { { 1,0,0,0 },{ 0,cos(angle),sin(angle),H },{ 0,-sin(angle),cos(angle),0 },{ 0,0,0,1 } };
upixel[0] = u.first;
upixel[1] = u.second;
auto udist = frame.get_distance(upixel[0], upixel[1]);
rs2_deproject_pixel_to_point(upoint, &intr, upixel, udist);
float b[4] = { upoint[0],upoint[1],upoint[2],1 };
float out[4];
for (int i = 0; i < 4; i++)
{
float s = 0;
for (int k = 0; k < 4; k++)
s += extrin[i][k] * b[k];
out[i] = s;
};
if (udist < dis_max && udist > dis_min)
{
*outFile << out[0] << ';' << out[2] << ';' << -out[1] << ';' << out[0] << ';' << out[2] << ';' << -out[1] << ';' << "\n";
wpoint[0] = out[0];
wpoint[1] = out[2];
wpoint[2] = -out[1];
}
}
输入相机参数,根据相机位置进行坐标变换。

获得的深度图
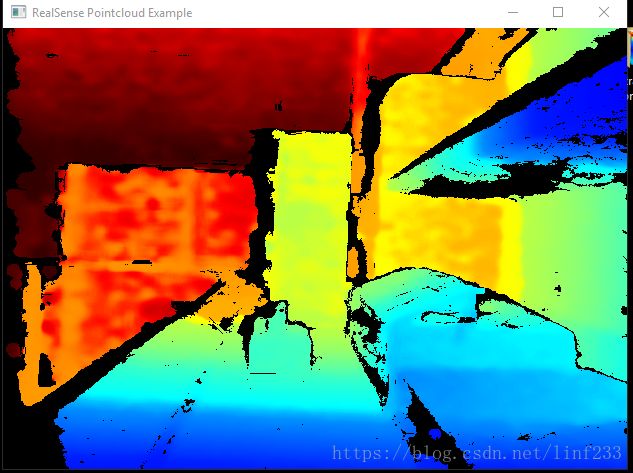
根据深度图生成的世界坐标系下的三维点云。

完成!
本小白做的六个月机器视觉的实习,第一次写博客有很多不到位的地方请大家谅解,有什么疑问可以留言私信给我,之后还会继续写Realsense的一些总结(才不是为了写报告!)
xD