ubuntu16.04下配置clion,pycharm的ROS开发环境
ubuntu16.04下配置clion,pycharm的ROS开发环境
每次需要重装系统,都要把环境配置一遍,然后打开好几个博客看,真是麻烦,还是自己做个总结吧。
clion安装
1.在官网https://www.jetbrains.com/直接下载,也可以到我网盘下载:网盘链接 提取码:t2s8
2.进入下载目录(我的是在Downloads文件夹),解压文件,拷贝到home文件夹,然后安装:
cd ~/Downloads
tar -zxvf CLion-2019.2.4.tar.gz
cp -Rf ./clion-2019.2.4/ ~/
cd ~/clion-2019.2.4/bin
./clion.sh
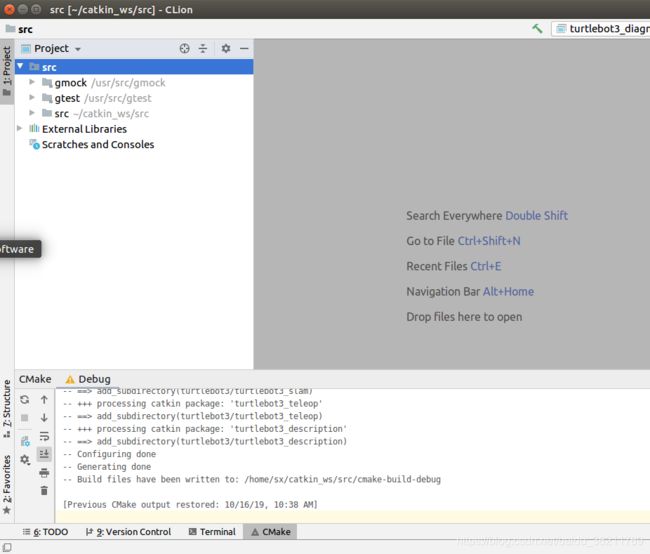
网上找个最新的注册码填入弹出的注册界面中,然后选择打开工程,选择ROS的工程文件夹,如:~/catkin_ws/src,一定要选到src文件夹(因为src下有CMakeLists.txt文件,如果不在src中,没有CMakeLists.txt文件,clion会自己建一个CMakeLIsts文件,这样就跟ROS的catkin工程文件目录就不匹配了),目标是在不影响正常catkin工作空间的情况下使用Clion。结果如下:
防止注册码失效,请进行如下操作:
sudo vim /etc/hosts
加入
0.0.0.0 account.jetbrains.com
0.0.0.0 www.jetbrains.com
结果如下图:

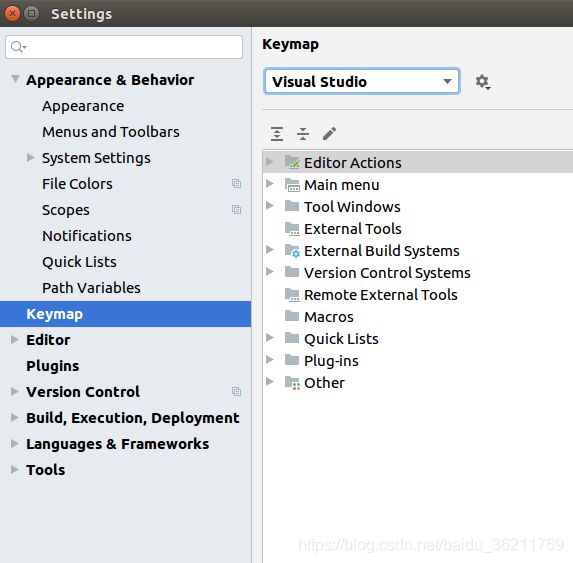
3.设置clion快捷键:
File->Setting->Keymap->Keymaps 选择Visual Studio风格
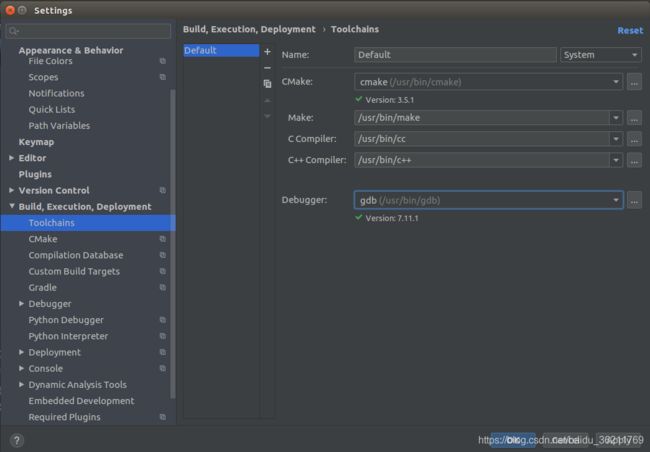
4.设置编译工具:
File->Setting->Build,Execution,Deployment->Toolchains
CMake设置:
/usr/bin/cmake
Make设置:
/usr/bin/make
C Compiler设置:
/usr/bin/cc
C++ Compiler设置:
/usr/bin/c++
Debugger设置:
/usr/bin/gdb
效果如下:
5.设置CMake:
File->Setting->Build,Execution,Deployment->CMake
首先是Debug模式:
name设置:
Debug
Build type设置:
Debug
CMake options设置(设置成自己的catkin空间名称,我自己编译包的catkin空间是catkin_ws):
-DCMAKE_BUILD_TYPE=Debug -DCATKIN_DEVEL_PREFIX:PATH=~/catkin_ws/devel
Generation path设置(同样设置成自己的catkin空间名称,我自己编译包的catkin空间是catkin_ws):
~/catkin_ws/build
Build options设置(这个可以不设置的):
-j 4
最后如下图:

接下来是Release模式:
name设置:
Release
Build type设置:
Release
CMake options设置(设置成自己的catkin空间名称,我自己编译包的catkin空间是catkin_ws,如果只想编译一个包,那可以在这个地方再加-DCATKIN_WHITELIST_PACKAGES=’’,引号里面写只编译的包名):
-DCMAKE_BUILD_TYPE=Release -DCATKIN_DEVEL_PREFIX:PATH=~/catkin_ws/devel
Generation path设置(同样设置成自己的catkin空间名称,我自己编译包的catkin空间是catkin_ws):
~/catkin_ws/build
Build options设置(这个可以不设置的):
-j 4
最后如下图:

6.安装ROS插件(据说该插件能自动帮忙解决ROS环境问题,但对于多工作空间,估计也不好用,没兴趣的可以不装,后面会讲自动加载ROS开发环境,小伙伴们,不用担心):
File->Setting->Plugins
搜索:ROS,选择ROS-Robot Operating System插件,点击“install”按钮,结果如下:

安装完后,File->Import ROS workspace,加载ROS开发环境。
7.配置clion桌面图标,下次直接点击桌面图标就可以直接进行ROS开发,不用再手动加载ROS环境:
gedit ~/clion-2019.2.4/bin/ros_clion.sh
输入(注意第一行是source你的catkin总空间,各人空间名称不一样,我的总空间是catkin_overlay_ws,至于ROS有多个catkin空间,如何只需要source一个空间,这个下次再写):
source ~/catkin_overlay_ws/devel/setup.bash
bash ~/clion-2019.2.4/bin/clion.sh
保存,然后在终端里面给予权限:
sudo chmod a+x ros_clion.sh
再创建桌面快捷方式:
sudo touch /usr/share/applications/clion.desktop
sudo vim /usr/share/applications/clion.desktop
输入:
[Desktop Entry]
Encoding=UTF-8
Name=CLion
Comment=clion-2019.2.4
Exec=bash -i -c "~/clion-2019.2.4/bin/ros_clion.sh" %f
Icon=~/clion-2019.2.4/bin/clion.svg
Categories=Application;Development;Java;IDE
Version=2019.2.4
Type=Application
Terminal=false
StartupWMClass=jetbrains-clion
8.接下来配置一下系统变量:
sudo vim ~/.bashrc
.bashrc中插入一行(已经有PATH变量的,就增加clion路径):
export PATH=~/clion-2019.2.4/bin/:$PATH
OK,此时,全部配置完了。
pycharm安装
1.在官网https://www.jetbrains.com/直接下载,也可以到我网盘下载:网盘链接
提取码:zuxy
2.进入下载目录(我的是在Downloads文件夹),解压文件,拷贝到home文件夹,然后安装:
cd ~/Downloads
tar -zxvf pycharm-professional-2019.2.3.tar.gz
cp -Rf ./pycharm-2019.2.3/ ~/
cd ~/pycharm-2019.2.3/bin
./pycharm.sh
拿上面的clion的注册码输入进去,就行了,不行的话,在网上继续找一个。
同时,防止注册码失效的方法上面clion那边也做过了,然后选择“open”,选择ROS的工程文件夹,如:~/catkin_ws/src
3.同样是设置pycharm快捷键:
File->Settings->Keymap 选择Visual Studio风格,此处不上图了,跟clion差不多。
4.配置工程编译环境:
File->Settings->Project:src->Project Interpreter
点击按钮,选择“add”,如下:
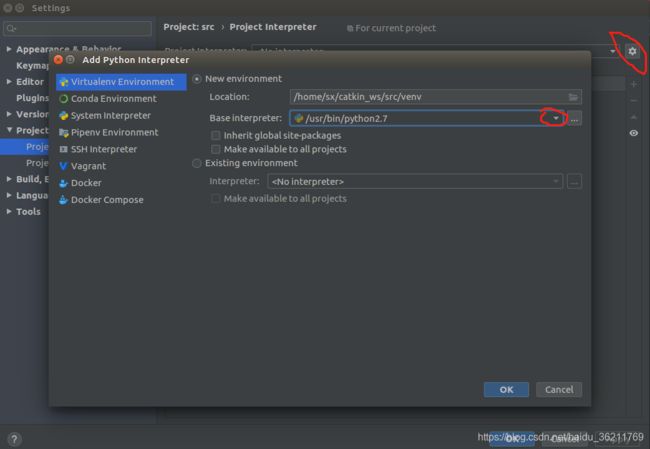
python的环境很多,有python2的,有python3的,也有跟深度学习想对应配置环境的python,自己根据自己的情况选择开发方式就行了。
5.配置pycharm桌面图标,下次直接点击桌面图标就可以直接进行ROS开发,不用再手动加载ROS环境:
gedit ~/pycharm-2019.2.3/bin/ros_pycharm.sh
输入(注意第一行是source你的catkin总空间):
source ~/catkin_overlay_ws/devel/setup.bash
bash ~/pycharm-2019.2.3/bin/pycharm.sh
保存,然后在终端里面给予权限:
sudo chmod a+x ros_pycharm.sh
再创建桌面快捷方式:
sudo touch /usr/share/applications/pycharm.desktop
sudo vim /usr/share/applications/pycharm.desktop
输入:
[Desktop Entry]
Encoding=UTF-8
Name=PyCharm
Comment=pycharm-2019.2.3
Exec=bash -i -c "~/pycharm-2019.2.3/bin/ros_pycharm.sh" %f
Icon=~/pycharm-2019.2.3/bin/pycharm.svg
Categories=Application;Development;Python;IDE
Version=2019.2.3
Type=Application
Terminal=false
StartupWMClass=jetbrains-pycharm
6.接下来配置一下系统变量:
sudo vim ~/.bashrc
.bashrc中修改PATH配置:
export PATH=~/clion-2019.2.4/bin/:~/pycharm-2019.2.3/bin:$PATH
OK,此时,全部配置完了。