ROS_Kinetic_29 kamtoa simulation学习与示例分析(一)
致谢源代码网址:https://github.com/Tutorgaming/kamtoa-simulation
kamtoa simulation学习与示例分析(一)
源码学习与分析是学习ROS,包括RVIZ和Gazebo等必须的过程,大量代码的阅读能够提高加快理解熟练使用ROS Kinetic。
首先,先看文件组织:
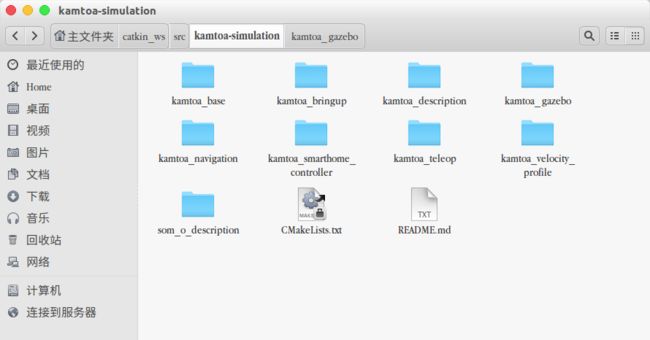
一般README中有详细的使用说明,包括安装,使用和示例教程。
CMakeLists.txt:
# toplevel CMakeLists.txt for a catkin workspace
# catkin/cmake/toplevel.cmake
cmake_minimum_required(VERSION 2.8.3)
set(CATKIN_TOPLEVEL TRUE)
# search for catkin within the workspace
set(_cmd "catkin_find_pkg" "catkin" "${CMAKE_SOURCE_DIR}")
execute_process(COMMAND ${_cmd}
RESULT_VARIABLE _res
OUTPUT_VARIABLE _out
ERROR_VARIABLE _err
OUTPUT_STRIP_TRAILING_WHITESPACE
ERROR_STRIP_TRAILING_WHITESPACE
)
if(NOT _res EQUAL 0 AND NOT _res EQUAL 2)
# searching fot catkin resulted in an error
string(REPLACE ";" " " _cmd_str "${_cmd}")
message(FATAL_ERROR "Search for 'catkin' in workspace failed (${_cmd_str}): ${_err}")
endif()
# include catkin from workspace or via find_package()
if(_res EQUAL 0)
set(catkin_EXTRAS_DIR "${CMAKE_SOURCE_DIR}/${_out}/cmake")
# include all.cmake without add_subdirectory to let it operate in same scope
include(${catkin_EXTRAS_DIR}/all.cmake NO_POLICY_SCOPE)
add_subdirectory("${_out}")
else()
# use either CMAKE_PREFIX_PATH explicitly passed to CMake as a command line argument
# or CMAKE_PREFIX_PATH from the environment
if(NOT DEFINED CMAKE_PREFIX_PATH)
if(NOT "$ENV{CMAKE_PREFIX_PATH}" STREQUAL "")
string(REPLACE ":" ";" CMAKE_PREFIX_PATH $ENV{CMAKE_PREFIX_PATH})
endif()
endif()
# list of catkin workspaces
set(catkin_search_path "")
foreach(path ${CMAKE_PREFIX_PATH})
if(EXISTS "${path}/.catkin")
list(FIND catkin_search_path ${path} _index)
if(_index EQUAL -1)
list(APPEND catkin_search_path ${path})
endif()
endif()
endforeach()
# search for catkin in all workspaces
set(CATKIN_TOPLEVEL_FIND_PACKAGE TRUE)
find_package(catkin QUIET
NO_POLICY_SCOPE
PATHS ${catkin_search_path}
NO_DEFAULT_PATH NO_CMAKE_FIND_ROOT_PATH)
unset(CATKIN_TOPLEVEL_FIND_PACKAGE)
if(NOT catkin_FOUND)
message(FATAL_ERROR "find_package(catkin) failed. catkin was neither found in the workspace nor in the CMAKE_PREFIX_PATH. One reason may be that no ROS setup.sh was sourced before.")
endif()
endif()
catkin_workspace()这里,先看kamtoa_gazebo文件夹下:
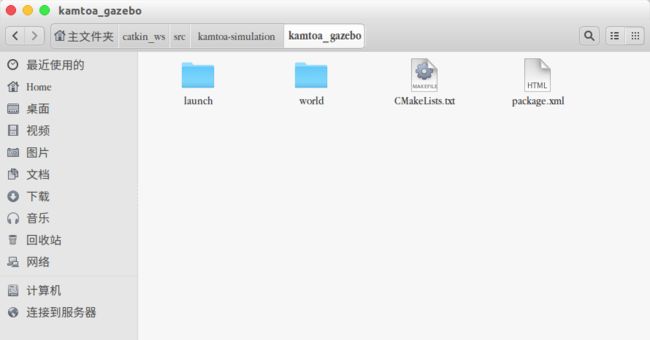
CMakeLists.txt中包含需要的功能包,如下截取部分代码片段:
cmake_minimum_required(VERSION 2.8.3)
project(kamtoa_gazebo)
## Find catkin macros and libraries
## if COMPONENTS list like find_package(catkin REQUIRED COMPONENTS xyz)
## is used, also find other catkin packages
find_package(catkin REQUIRED COMPONENTS
gazebo_msgs
gazebo_plugins
gazebo_ros
gazebo_ros_control
kamtoa_description
)
## System dependencies are found with CMake's conventions
# find_package(Boost REQUIRED COMPONENTS system)
kamtoa_gazebo
0.0.0
The kamtoa_gazebo package
c3mx
TODO
catkin
gazebo_msgs
gazebo_plugins
gazebo_ros
gazebo_ros_control
kamtoa_description
gazebo_msgs
gazebo_plugins
gazebo_ros
gazebo_ros_control
kamtoa_description
注意这里的
world文件夹下存放gazebo模型,打开可以看到:

building1.world和whiz_ex.world,具体解析可以参考博客中GazeboSim中内容,具体的模型文件为sdf 1.6对应Gazebo7,以whiz_ex_window为例,分为model.config和model.sdf如下:
model.sdf:
0.232213 1.38881 0 0 -0 0
0.9 0.17 2
0 0 1 0 -0 0
0 0 1 0 -0 0
0.9 0.17 2
0.29567 1.0429 0 0 0 -3.12055
0.949838 0.2 2
0 0 1 0 -0 0
0 0 1 0 -0 0
0.949838 0.2 2
-0.776238 1.0429 0 0 -0 3.14159
0.9 0.17 2
0 0 1 0 -0 0
0 0 1 0 -0 0
0.9 0.17 2
-4.14363 1.09228 0 0 -0 0
0.9 0.17 2
0 0 1 0 -0 0
0 0 1 0 -0 0
0.9 0.17 2
-1.75347 -0.819856 0 0 0 -3.12358
-1.6817 -3.67821 0 0 -0 0
-1.17971 0 1.25 0 -0 0
5.89059 0.15 2.5
1 1 1 1
5.89059 0.15 2.5
-1.17971 0 1.25 0 -0 0
3.9453 0 1.25 0 -0 0
0.35941 0.15 2.5
1 1 1 1
0.35941 0.15 2.5
3.9453 0 1.25 0 -0 0
2.76559 0 0 0 -0 0
2 0.15 0
1 1 1 1
2 0.15 0
2.76559 0 0 0 -0 0
2.76559 0 2.45 0 -0 0
2 0.15 0.1
1 1 1 1
2 0.15 0.1
2.76559 0 2.45 0 -0 0
3.75 0.15 2.5
0 0 1.25 0 -0 0
0 0 1.25 0 -0 0
3.75 0.15 2.5
1 1 1 1
2.3683 -1.87821 0 0 -0 1.5708
9.25 0.15 2.5
0 0 1.25 0 -0 0
0 0 1.25 0 -0 0
9.25 0.15 2.5
1 1 1 1
-1.19255 3.74668 0 0 -0 3.14159
-4.65794 2.07148 0 0 0 -1.5708
-1.67569 0 1.25 0 -0 0
0.148611 0.15 2.5
1 1 1 1
0.148611 0.15 2.5
-1.67569 0 1.25 0 -0 0
1.07431 0 1.25 0 -0 0
1.35139 0.15 2.5
1 1 1 1
1.35139 0.15 2.5
1.07431 0 1.25 0 -0 0
-0.601389 0 2.4 0 -0 0
2 0.15 0.2
1 1 1 1
2 0.15 0.2
-0.601389 0 2.4 0 -0 0
1.25 0.15 2.5
0 0 1.25 0 -0 0
0 0 1.25 0 -0 0
1.25 0.15 2.5
1 1 1 1
-5.20794 0.396477 0 0 -0 3.14159
-5.75794 -1.65352 0 0 0 -1.5708
-1.07794 0 1.25 0 -0 0
2.09412 0.15 2.5
1 1 1 1
2.09412 0.15 2.5
-1.07794 0 1.25 0 -0 0
1.04706 0 0.25 0 -0 0
2.15588 0.15 0.5
1 1 1 1
2.15588 0.15 0.5
1.04706 0 0.25 0 -0 0
2.01762 0 1.5 0 -0 0
0.214766 0.15 2
1 1 1 1
0.214766 0.15 2
2.01762 0 1.5 0 -0 0
0.939679 0 1.9 0 -0 0
1.94111 0.15 1.2
1 1 1 1
1.94111 0.15 1.2
0.939679 0 1.9 0 -0 0
2.5 0.15 2.5
0 0 1.25 0 -0 0
0 0 1.25 0 -0 0
2.5 0.15 2.5
1 1 1 1
-2.53404 1.06604 0 0 -0 0
2 0.15 2.5
0 0 1.25 0 -0 0
0 0 1.25 0 -0 0
2 0.15 2.5
1 1 1 1
-1.35904 0.141035 0 0 0 -1.5708
0.25 0.15 2.5
0 0 1.25 0 -0 0
0 0 1.25 0 -0 0
0.25 0.15 2.5
1 1 1 1
-1.40904 -0.783965 0 0 -0 3.14159
3.5 0.15 2.5
0 0 1.25 0 -0 0
0 0 1.25 0 -0 0
3.5 0.15 2.5
1 1 1 1
-3.91607 -0.818528 0 0 -0 3.14159
0.25 0.15 2.5
0 0 1.25 0 -0 0
0 0 1.25 0 -0 0
0.25 0.15 2.5
1 1 1 1
-5.64107 -0.818528 0 0 -0 3.14159
2 0.15 2.5
0 0 1.25 0 -0 0
0 0 1.25 0 -0 0
2 0.15 2.5
1 1 1 1
-3.31229 0.121197 0 0 0 -1.5708
1.75 0.15 2.5
0 0 1.25 0 -0 0
0 0 1.25 0 -0 0
1.75 0.15 2.5
1 1 1 1
-1.86043 2.95447 0 0 0 -1.5708
0.75 0.15 2.5
0 0 1.25 0 -0 0
0 0 1.25 0 -0 0
0.75 0.15 2.5
1 1 1 1
-1.56043 2.15447 0 0 -0 0
2.75 0.15 2.5
0 0 1.25 0 -0 0
0 0 1.25 0 -0 0
2.75 0.15 2.5
1 1 1 1
-0.228595 2.39065 0 0 0 -1.5708
2.75 0.15 2.5
0 0 1.25 0 -0 0
0 0 1.25 0 -0 0
2.75 0.15 2.5
1 1 1 1
1.29304 2.34692 0 0 0 -1.5708
1.5 0.15 2.5
0 0 1.25 0 -0 0
0 0 1.25 0 -0 0
1.5 0.15 2.5
1 1 1 1
1.36463 1.03216 0 0 -0 0
4.05869 -2.66379 0 0 -0 0
-1.38368 0 1.25 0 -0 0
0.732645 0.15 2.5
1 1 1 1
0.732645 0.15 2.5
-1.38368 0 1.25 0 -0 0
1.61632 0 1.25 0 -0 0
0.267355 0.15 2.5
1 1 1 1
0.267355 0.15 2.5
1.61632 0 1.25 0 -0 0
0.232645 0 2.45 0 -0 0
2.5 0.15 0.1
1 1 1 1
2.5 0.15 0.1
0.232645 0 2.45 0 -0 0
0.25 0.15 2.5
0 0 1.25 0 -0 0
0 0 1.25 0 -0 0
0.25 0.15 2.5
1 1 1 1
-0.228595 1.04065 0 0 0 -1.5708
3.75 0.15 2.5
0 0 1.25 0 -0 0
0 0 1.25 0 -0 0
3.75 0.15 2.5
1 1 1 1
-0.233629 -1.95772 0 0 0 -1.5708
5.74567 0.386841 0 0 0 -1.57472
-2.83254 0 1.25 0 -0 0
0.586231 0.15 2.5
1 1 1 1
0.586231 0.15 2.5
-2.83254 0 1.25 0 -0 0
1.30211 0 1.25 0 -0 0
3.64708 0.15 2.5
1 1 1 1
3.64708 0.15 2.5
1.30211 0 1.25 0 -0 0
-1.53042 0 2.4 0 -0 0
2.018 0.15 0.2
1 1 1 1
2.018 0.15 0.2
-1.53042 0 2.4 0 -0 0
4.58265 3.43747 0 0 -0 3.14159
-0.530284 0 1.25 0 -0 0
1.43943 0.15 2.5
1 1 1 1
1.43943 0.15 2.5
-0.530284 0 1.25 0 -0 0
1.16972 0 1.25 0 -0 0
0.160568 0.15 2.5
1 1 1 1
0.160568 0.15 2.5
1.16972 0 1.25 0 -0 0
0.639432 0 2.25 0 -0 0
0.9 0.15 0.5
1 1 1 1
0.9 0.15 0.5
0.639432 0 2.25 0 -0 0
0.463251 0.15 2.5
0 0 1.25 0 -0 0
0 0 1.25 0 -0 0
0.463251 0.15 2.5
1 1 1 1
3.38255 3.59207 0 0 -0 1.73174
1.06733 -0.11797 0 0 -0 0.030549
-1.28558 0 1.25 0 -0 0
0.181978 0.15 2.5
1 1 1 1
0.181978 0.15 2.5
-1.28558 0 1.25 0 -0 0
0.540989 0 1.25 0 -0 0
1.67116 0.15 2.5
1 1 1 1
1.67116 0.15 2.5
0.540989 0 1.25 0 -0 0
-0.744593 0 2.25 0 -0 0
0.9 0.15 0.5
1 1 1 1
0.9 0.15 0.5
-0.744593 0 2.25 0 -0 0
-0.766361 -0.161298 0 0 -0 0.006708
-0.534301 0 1.25 0 -0 0
0.146885 0.15 2.5
1 1 1 1
0.146885 0.15 2.5
-0.534301 0 1.25 0 -0 0
0.511599 0 1.25 0 -0 0
0.19229 0.15 2.5
1 1 1 1
0.19229 0.15 2.5
0.511599 0 1.25 0 -0 0
-0.022702 0 2.25 0 -0 0
0.876312 0.15 0.5
1 1 1 1
0.876312 0.15 0.5
-0.022702 0 2.25 0 -0 0
1
主要是Gazebo仿真场景中各类物体的具体属性参数。
model.config:
whiz_ex_window
1.0
model.sdf
可以做一些署名,邮箱,说明等。
launch:
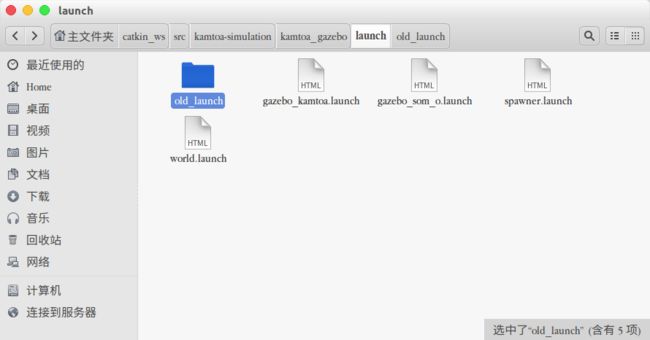
以gazebo_kamtoa.launch为例,具体说明:
分为基本参数,机器人描述(RVIZ和Gazebo),RVIZ初始化,Gazebo初始化等。这时,如果在终端运行:
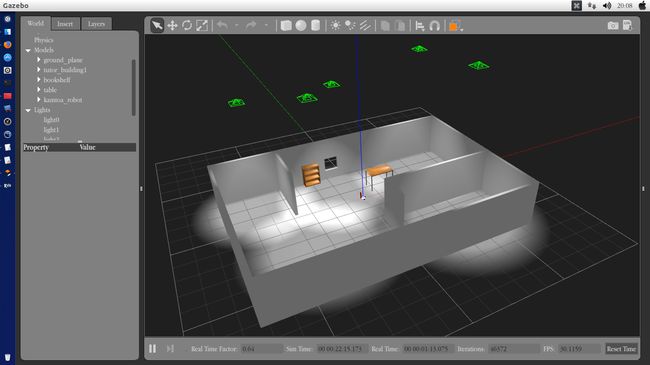
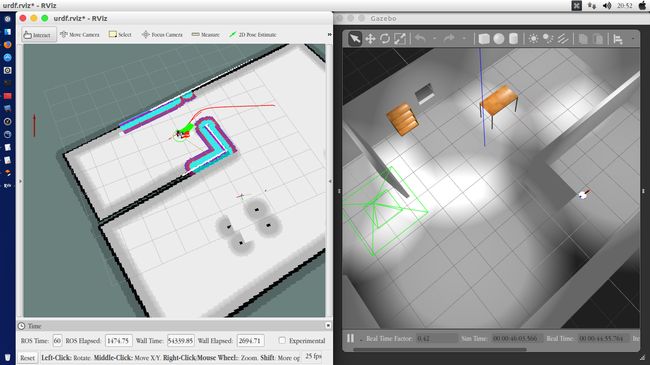
~$ roslaunch kamtoa_gazebo gazebo_kamtoa.launch可以启动roscore,rviz和gazebo如下:
relaybotbox@relaybotbox-desktop:~$ roslaunch kamtoa_gazebo gazebo_kamtoa.launch ... logging to /home/relaybotbox/.ros/log/e9deba26-9786-11e6-be4d-00e0b4159b08/roslaunch-relaybotbox-desktop-5005.log
Checking log directory for disk usage. This may take awhile.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
started roslaunch server http://relaybotbox-desktop:41694/
SUMMARY
========
PARAMETERS
* /robot_description: , set to ""
[ INFO] [1477051645.459096731, 1288.802000000]: Laser Plugin (robotNamespace = /), Info: Using the 'robotNamespace' param: '/'
[ INFO] [1477051645.459748522, 1288.802000000]: Starting Laser Plugin (ns = /)!
[ INFO] [1477051645.476788533, 1288.802000000]: Laser Plugin (ns = /) , set to ""
[ INFO] [1477051645.565133751, 1288.802000000]: Starting plugin DiffDrive(ns = //)!
[ INFO] [1477051645.565451828, 1288.802000000]: DiffDrive(ns = //): = Debug
[ INFO] [1477051645.568106826, 1288.802000000]: DiffDrive(ns = //): =
[DEBUG] [1477051645.568619326, 1288.802000000]: DiffDrive(ns = //): = cmd_vel
[DEBUG] [1477051645.568724979, 1288.802000000]: DiffDrive(ns = //): = odom
[DEBUG] [1477051645.568867307, 1288.802000000]: DiffDrive(ns = //): = odom
[DEBUG] [1477051645.568927646, 1288.802000000]: DiffDrive(ns = //): = base_footprint
[DEBUG] [1477051645.569256884, 1288.802000000]: DiffDrive(ns = //): = false
[DEBUG] [1477051645.569338164, 1288.802000000]: DiffDrive(ns = //): = false
[DEBUG] [1477051645.569393655, 1288.802000000]: DiffDrive(ns = //): = ture
[DEBUG] [1477051645.569843607, 1288.802000000]: DiffDrive(ns = //): = 0.29999999999999999
[DEBUG] [1477051645.569951337, 1288.802000000]: DiffDrive(ns = //): = 0.082000000000000003
[DEBUG] [1477051645.570012696, 1288.802000000]: DiffDrive(ns = //): = 1.8
[DEBUG] [1477051645.570077175, 1288.802000000]: DiffDrive(ns = //): = 30
[DEBUG] [1477051645.570139351, 1288.802000000]: DiffDrive(ns = //): = 100
[ WARN] [1477051645.570811579, 1288.802000000]: DiffDrive(ns = //): no matching key to 1
[DEBUG] [1477051645.571414503, 1288.802000000]: DiffDrive(ns = //): = default := 1
[DEBUG] [1477051645.572053861, 1288.802000000]: DiffDrive(ns = //): = front_left_wheel_joint
[DEBUG] [1477051645.572185748, 1288.802000000]: DiffDrive(ns = //): = front_right_wheel_joint
[ INFO] [1477051645.576771098, 1288.802000000]: DiffDrive(ns = //): Try to subscribe to cmd_vel!
[ INFO] [1477051645.593900394, 1288.802000000]: DiffDrive(ns = //): Subscribe to cmd_vel!
[ INFO] [1477051645.597711053, 1288.802000000]: DiffDrive(ns = //): Advertise odom on odom !
[ INFO] [1477051645.648506913, 1288.825000000]: waitForService: Service [/gazebo/set_physics_properties] is now available.
[ INFO] [1477051645.836105586, 1288.862000000]: Physics dynamic reconfigure ready. 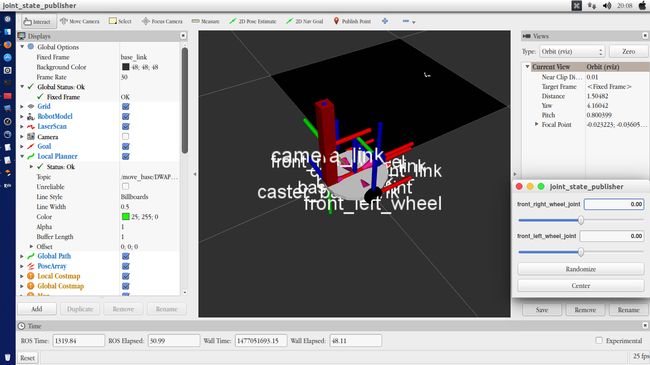
可以用如下工具进行分析:
rqt_action rqt_logger_level rqt_robot_monitor
rqt_bag rqt_moveit rqt_robot_steering
rqt_bag_plugins rqt_msg rqt_runtime_monitor
rqt_console rqt_nav_view rqt_rviz
rqt_dep rqt_plot rqt_service_caller
rqt_graph rqt_pose_view rqt_shell
rqt_gui rqt_publisher rqt_srv
rqt_gui_cpp rqt_py_common rqt_tf_tree
rqt_gui_py rqt_py_console rqt_top
rqt_image_view rqt_reconfigure rqt_topic
rqt_launch rqt_robot_dashboard rqt_web以rqt_topic为例,可以参看全部主题:
~$ rosrun rqt_topic rqt_topic
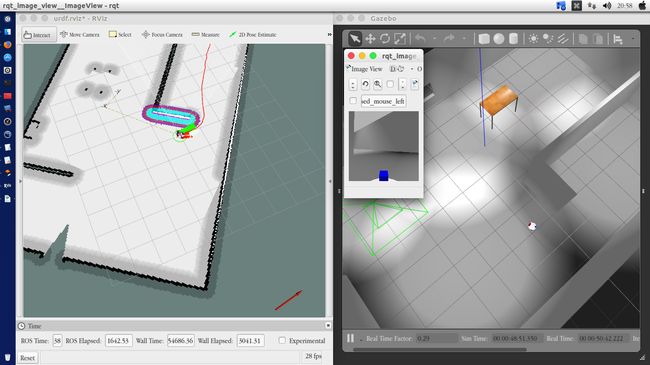
如果需要查看camera_rgb,可以运行如下命令:
~$ rosrun rqt_image_view rqt_image_view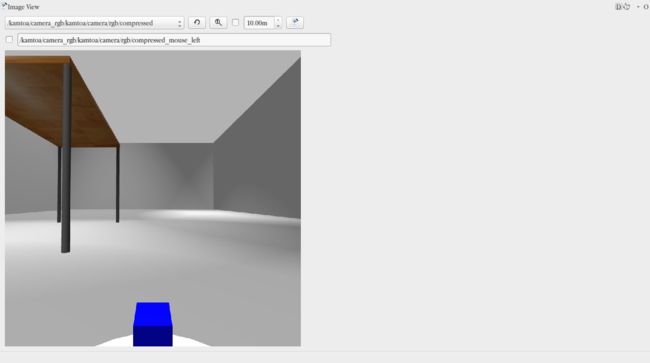
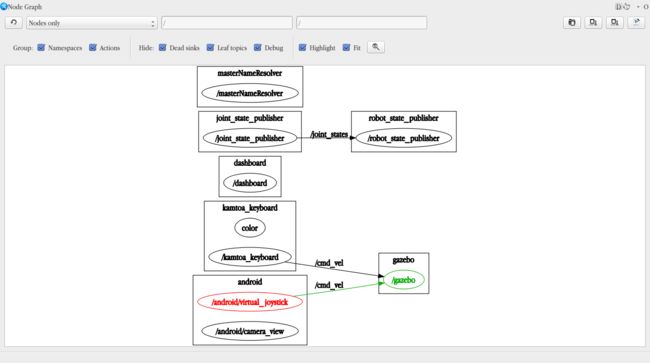
运行rosrun rqt_graph rqt_graph:
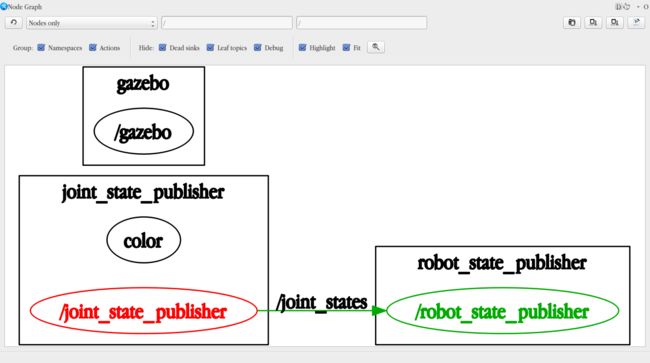
此时,gazebo与其他节点并无通信,然后启动如下命令:
~$ roslaunch kamtoa_teleop teleop_keyboard.launch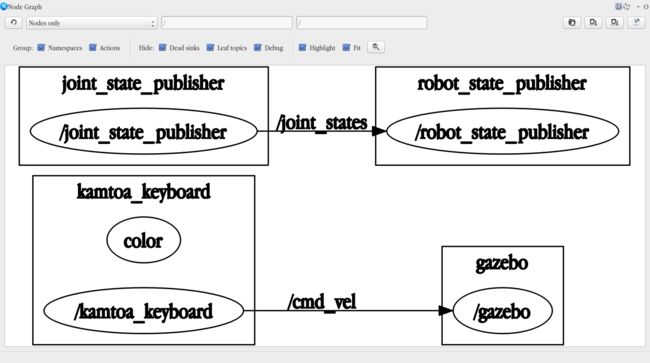
这时,就可以使用键盘通过/cmd_vel控制gazebo中的机器人在环境中运动,当然键盘控制还有其他一些功能,请看如下源码。
#!/usr/bin/env python
# Copyright (c) 2011, Willow Garage, Inc.
# All rights reserved.
#
# Redistribution and use in source and binary forms, with or without
# modification, are permitted provided that the following conditions are met:
#
# * Redistributions of source code must retain the above copyright
# notice, this list of conditions and the following disclaimer.
# * Redistributions in binary form must reproduce the above copyright
# notice, this list of conditions and the following disclaimer in the
# documentation and/or other materials provided with the distribution.
# * Neither the name of the Willow Garage, Inc. nor the names of its
# contributors may be used to endorse or promote products derived from
# this software without specific prior written permission.
#
# THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS "AS IS"
# AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO, THE
# IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE
# ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT OWNER OR CONTRIBUTORS BE
# LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL, EXEMPLARY, OR
# CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT LIMITED TO, PROCUREMENT OF
# SUBSTITUTE GOODS OR SERVICES; LOSS OF USE, DATA, OR PROFITS; OR BUSINESS
# INTERRUPTION) HOWEVER CAUSED AND ON ANY THEORY OF LIABILITY, WHETHER IN
# CONTRACT, STRICT LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE)
# ARISING IN ANY WAY OUT OF THE USE OF THIS SOFTWARE, EVEN IF ADVISED OF THE
# POSSIBILITY OF SUCH DAMAGE.
import rospy
from geometry_msgs.msg import Twist
import sys, select, termios, tty
msg = """
Control Your Turtlebot!
---------------------------
Moving around:
u i o
j k l
m , .
q/z : increase/decrease max speeds by 10%
w/x : increase/decrease only linear speed by 10%
e/c : increase/decrease only angular speed by 10%
space key, k : force stop
anything else : stop smoothly
CTRL-C to quit
"""
lightSwitches = {
'1':'light0',
'2':'light1',
'3':'light2',
'4':'light3',
'5':'light4'
}
moveBindings = {
'i':(1,0),
'o':(1,-1),
'j':(0,1),
'l':(0,-1),
'u':(1,1),
',':(-1,0),
'.':(-1,1),
'm':(-1,-1),
}
speedBindings={
'q':(1.1,1.1),
'z':(.9,.9),
'w':(1.1,1),
'x':(.9,1),
'e':(1,1.1),
'c':(1,.9),
}
def getKey():
tty.setraw(sys.stdin.fileno())
rlist, _, _ = select.select([sys.stdin], [], [], 0.1)
if rlist:
key = sys.stdin.read(1)
else:
key = ''
termios.tcsetattr(sys.stdin, termios.TCSADRAIN, settings)
return key
speed = .2
turn = 1
def vels(speed,turn):
return "currently:\tspeed %s\tturn %s " % (speed,turn)
if __name__=="__main__":
settings = termios.tcgetattr(sys.stdin)
rospy.init_node('Kamtoa_teleop_keyboard')
pub = rospy.Publisher('cmd_vel', Twist, queue_size=5)
light_select = ''
x = 0
th = 0
status = 0
count = 0
acc = 0.1
target_speed = 0
target_turn = 0
control_speed = 0
control_turn = 0
try:
print msg
print vels(speed,turn)
while(1):
key = getKey()
if key in moveBindings.keys():
x = moveBindings[key][0]
th = moveBindings[key][1]
count = 0
elif key in speedBindings.keys():
speed = speed * speedBindings[key][0]
turn = turn * speedBindings[key][1]
count = 0
print vels(speed,turn)
if (status == 14):
print msg
status = (status + 1) % 15
elif key == ' ' or key == 'k' :
x = 0
th = 0
control_speed = 0
control_turn = 0
elif key in lightSwitches.keys():
print "lightSwitch pressed!"
else:
count = count + 1
if count > 4:
x = 0
th = 0
if (key == '\x03'):
break
target_speed = speed * x
target_turn = turn * th
if target_speed > control_speed:
control_speed = min( target_speed, control_speed + 0.02 )
elif target_speed < control_speed:
control_speed = max( target_speed, control_speed - 0.02 )
else:
control_speed = target_speed
if target_turn > control_turn:
control_turn = min( target_turn, control_turn + 0.1 )
elif target_turn < control_turn:
control_turn = max( target_turn, control_turn - 0.1 )
else:
control_turn = target_turn
twist = Twist()
twist.linear.x = control_speed; twist.linear.y = 0; twist.linear.z = 0
twist.angular.x = 0; twist.angular.y = 0; twist.angular.z = control_turn
pub.publish(twist)
except:
print e
finally:
twist = Twist()
twist.linear.x = 0; twist.linear.y = 0; twist.linear.z = 0
twist.angular.x = 0; twist.angular.y = 0; twist.angular.z = 0
pub.publish(twist)
termios.tcsetattr(sys.stdin, termios.TCSADRAIN, settings)使用手机控制机器人运动也很方便,先查询一下地址:
relaybotbox@relaybotbox-desktop:~$ ifconfig -a
enp3s0 Link encap:以太网 硬件地址 00:e0:b4:15:9b:08
inet 地址:192.168.3.23 广播:192.168.3.255 掩码:255.255.255.0
inet6 地址: fe80::3805:e5fe:19f0:19e2/64 Scope:Link
UP BROADCAST RUNNING MULTICAST MTU:1500 跃点数:1
接收数据包:32257 错误:0 丢弃:0 过载:0 帧数:0
发送数据包:41654 错误:0 丢弃:0 过载:0 载波:0
碰撞:0 发送队列长度:1000
接收字节:23057526 (23.0 MB) 发送字节:17828352 (17.8 MB)
enp4s0 Link encap:以太网 硬件地址 00:e0:b4:15:9b:09
UP BROADCAST MULTICAST MTU:1500 跃点数:1
接收数据包:0 错误:0 丢弃:0 过载:0 帧数:0
发送数据包:0 错误:0 丢弃:0 过载:0 载波:0
碰撞:0 发送队列长度:1000
接收字节:0 (0.0 B) 发送字节:0 (0.0 B)
lo Link encap:本地环回
inet 地址:127.0.0.1 掩码:255.0.0.0
inet6 地址: ::1/128 Scope:Host
UP LOOPBACK RUNNING MTU:65536 跃点数:1
接收数据包:8314866 错误:0 丢弃:0 过载:0 帧数:0
发送数据包:8314866 错误:0 丢弃:0 过载:0 载波:0
碰撞:0 发送队列长度:1
接收字节:671600054 (671.6 MB) 发送字节:671600054 (671.6 MB)
在手机设置IP:192.168.3.23。连接成功后可以看到:
如何让机器人在环境中进行导航呢?运行下面命令:
~$ roslaunch kamtoa_navigation kamtoa_navigation.launch其中代码如下:
是不是有很多眼熟的内容,导入Map,机器人位置初值,AMCL,速度平滑,导航等。
这是再看下rqt_graph:
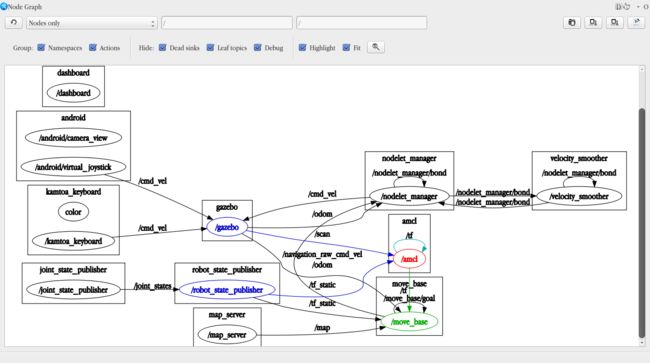
各个节点之间联系清晰可见。
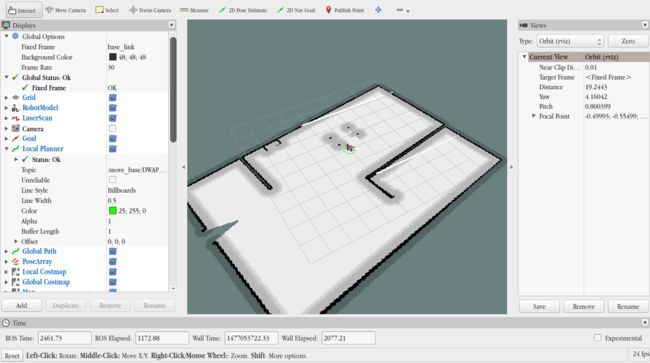
路径规划效果如下:
其他内容后续补充。
附加内容:
http://rosclub.cn/post-569.html
参考如下:
ROS与Android的窃窃私语
# 简介ROS (Robot Operating System, 机器人操作系统) 提供一系列程序库和工具以帮助软件开发者创建机器人应用软件。它提供了硬件抽象、设备驱动、函数库、可视化工具、消息传递和软件包管理等诸多功能。ROS遵循BSD开源许可协议 Android是一种基于Linux的自由及开放源代码的操作系统,主要使用于移动设备,如智能手机和平板电脑,由Google公司和开放手机联盟领导及开发 ROS严格来说并不算OS,而是一套运行于linux之上,连接机器人软硬件的软件包,而Android是针对于移动端的定制Linux.我们主要来聊聊ROS与Android之间的通信 # 通信方式目前,ROS与Android主要的通信方式有两种:
接下来我们主要讨论第二种方式的实现过程 # 具体实现1、了解通信协议 rosbridge protocol2、ROS端安装对应版本rosbridge-suite
3、ROS端启动launch,你也可以include到自己的launch文件
4、Android端需要一个websocket的java实现,然后就是按协议解析json,这好像也挺麻烦的嘛,不过好在找到一个开源项目ROSBridgeClient,貌似是一个netbeans project,我是直接把源码Copy到自己项目中来,该库依赖于java_websocket 和 json_simple两个library,这样就可以开始写你自己的逻辑代码了# APK Demo目前APK已实现功能有:
理论上来说,应该能在Android端实现rviz类似的功能,大家可以体验一下我实现的Demo (下载地址点我) ,最后放几张截图 |