使用python3+opencv3实现的识别答题卡的例子(01)
answer_sheet_scan
使用python3+opencv3实现的一些识别答题卡的例子
由于工作需要,最近在研究关于如何通过程序识别答题卡的客观题的答案,之前虽然接触过python,但对于计算机视觉这一块却完全是一个陌生的领域,经过各种调研,发现网上大多数的例子都是采用的OpenCV这个开源库来做的,OpenCV是计算机视觉领域的处理的一个非常优秀的开源库,原生由C++编写,也提供了各个主流编程语言的接口支持,这里选择python完全是因为python在计算机科学领域有着压倒性的优势和生态系统,所以使用它毫无疑问,最快上手的方式莫过于直接阅读网上已有的例子或者轮子了,通过阅读源码以问题驱动的方式来学习和研究某一项技术是比较高效的一种方式。
识别例子01
例子01是参考:pyimagesearch网站上一个识别例子,参考作者的源码,先在本地运行成功之后,然后加上自己的理解,给大多数核心代码加上了详细的中文注释,并在每一个关键阶段都会弹出具体的窗体展示识别流程,这样便于大家更能详细的看到核心部分的细节,感兴趣的同学,可以自己在再尝试加一些更细部分的debug弹窗。
例子01的在我本地PyCharm运行后一些截图:
(1)原图

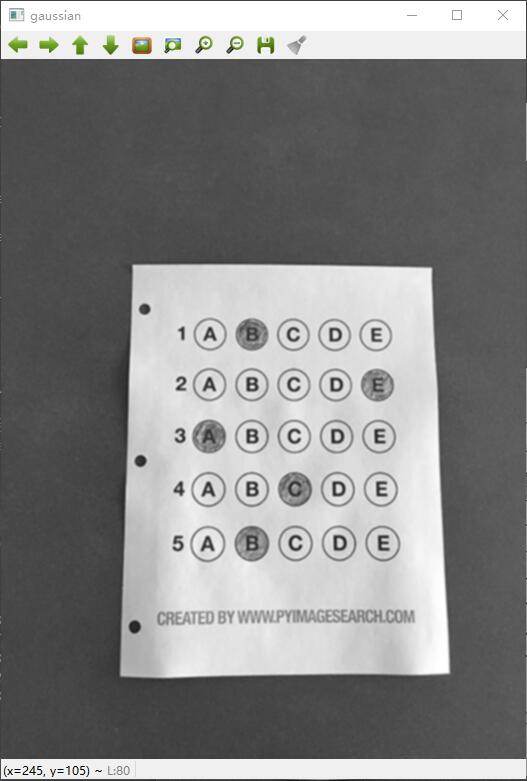
(2)灰度+高斯模糊后的图
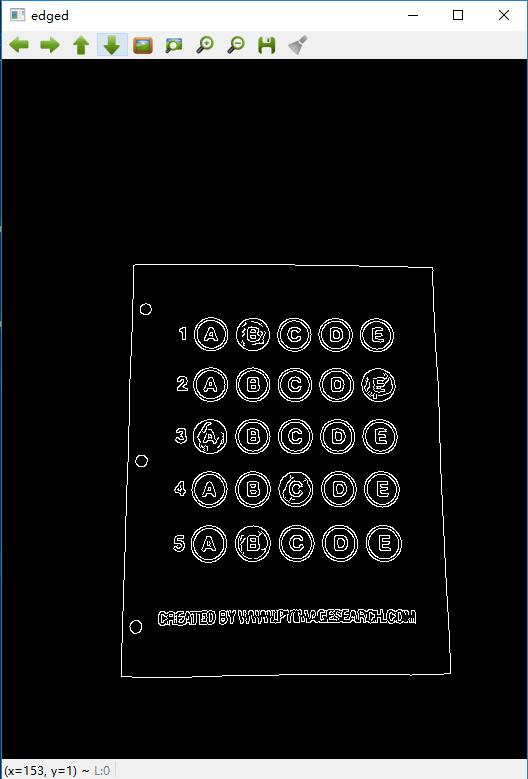
(3)使用边缘检测后的图
(4)透视变换后提取指定答题区域的灰度图

(5)使用ostu的二值化后的图

(6)识别答案成功后的图

(7)标记出做对和做错的图并计算得分

代码如下:
# -*- coding:utf-8 -*-
from imutils.perspective import four_point_transform
from imutils import contours
import numpy as np
import imutils
import cv2 as cv
ANSWER_KEY_SCORE = {0: 1, 1: 4, 2: 0, 3: 3, 4: 1}
ANSWER_KEY = {0: "A", 1: "B", 2: "C", 3: "D", 4: "E"}
# 加载一个图片到opencv中
img = cv.imread('E:\\tmp\\t1.png')
cv.imshow("orgin",img)
#转化成灰度图片
gray=cv.cvtColor(img,cv.COLOR_BGR2GRAY)
cv.imshow("gray",gray)
gaussian_bulr = cv.GaussianBlur(gray, (5, 5), 0) # 高斯模糊
cv.imshow("gaussian",gaussian_bulr)
edged=cv.Canny(gaussian_bulr,75,200) # 边缘检测,灰度值小于2参这个值的会被丢弃,大于3参这个值会被当成边缘,在中间的部分,自动检测
cv.imshow("edged",edged)
# 寻找轮廓
image, cts, hierarchy = cv.findContours( edged.copy(), cv.RETR_EXTERNAL, cv.CHAIN_APPROX_SIMPLE)
# 给轮廓加标记,便于我们在原图里面观察,注意必须是原图才能画出红色,灰度图是没有颜色的
# cv.drawContours(img, cts, -1, (0,0,255), 3)
# 按面积大小对所有的轮廓排序
list=sorted(cts,key=cv.contourArea,reverse=True)
print("寻找轮廓的个数:",len(cts))
cv.imshow("draw_contours",img)
# 正确题的个数
correct_count=0
for c in list:
# 周长,第1个参数是轮廓,第二个参数代表是否是闭环的图形
peri=0.01*cv.arcLength(c,True)
# 获取多边形的所有定点,如果是四个定点,就代表是矩形
approx=cv.approxPolyDP(c,peri,True)
# 打印定点个数
print("顶点个数:",len(approx))
if len(approx)==4: #矩形
# 透视变换提取原图内容部分
ox_sheet = four_point_transform(img, approx.reshape(4, 2))
# 透视变换提取灰度图内容部分
tx_sheet = four_point_transform(gray, approx.reshape(4, 2))
cv.imshow("ox", ox_sheet)
cv.imshow("tx", tx_sheet)
# 使用ostu二值化算法对灰度图做一个二值化处理
ret,thresh2 = cv.threshold(tx_sheet, 0, 255,cv.THRESH_BINARY_INV | cv.THRESH_OTSU)
cv.imshow("ostu", thresh2)
# 继续寻找轮廓
r_image, r_cnt, r_hierarchy = cv.findContours(thresh2.copy(), cv.RETR_EXTERNAL, cv.CHAIN_APPROX_SIMPLE)
print("找到轮廓个数:",len(r_cnt))
# 使用红色标记所有的轮廓
# cv.drawContours(ox_sheet,r_cnt,-1,(0,0,255),2)
# 把所有找到的轮廓,给标记出来
questionCnts = []
for cxx in r_cnt:
# 通过矩形,标记每一个指定的轮廓
x, y, w, h = cv.boundingRect(cxx)
ar = w / float(h)
if w >= 20 and h >= 20 and ar >= 0.9 and ar <= 1.1:
# 使用红色标记,满足指定条件的图形
# cv.rectangle(ox_sheet, (x, y), (x + w, y + h), (0, 0, 255), 2)
# 把每个选项,保存下来
questionCnts.append(cxx)
cv.imshow("ox_1", ox_sheet)
# 按坐标从上到下排序
questionCnts = contours.sort_contours(questionCnts, method="top-to-bottom")[0]
# 使用np函数,按5个元素,生成一个集合
for (q, i) in enumerate(np.arange(0, len(questionCnts), 5)):
# 获取按从左到右的排序后的5个元素
cnts = contours.sort_contours(questionCnts[i:i + 5])[0]
bubble_rows=[]
# 遍历每一个选项
for (j, c) in enumerate(cnts):
# 生成一个大小与透视图一样的全黑背景图布
mask = np.zeros(tx_sheet.shape, dtype="uint8")
# 将指定的轮廓+白色的填充写到画板上,255代表亮度值,亮度=255的时候,颜色是白色,等于0的时候是黑色
cv.drawContours(mask, [c], -1, 255, -1)
# 做两个图片做位运算,把每个选项独自显示到画布上,为了统计非0像素值使用,这部分像素最大的其实就是答案
mask = cv.bitwise_and(thresh2, thresh2, mask=mask)
# cv.imshow("c" + str(i), mask)
# 获取每个答案的像素值
total = cv.countNonZero(mask)
# 存到一个数组里面,tuple里面的参数分别是,像素大小和答案的序号值
# print(total,j)
bubble_rows.append((total,j))
bubble_rows=sorted(bubble_rows,key=lambda x: x[0],reverse=True)
# 选择的答案序号
choice_num=bubble_rows[0][1]
print("答案:{} 数据: {}".format(ANSWER_KEY.get(choice_num),bubble_rows))
fill_color=None
# 如果做对就加1
if ANSWER_KEY_SCORE.get(q) == choice_num:
fill_color = (0, 255, 0) #正确 绿色
correct_count = correct_count+1
else:
fill_color = (0, 0, 255) #错误 红色
cv.drawContours(ox_sheet, cnts[choice_num], -1, fill_color, 2)
cv.imshow("answer_flagged", ox_sheet)
text1 = "total: " + str(len(ANSWER_KEY)) + ""
text2 = "right: " + str(correct_count)
text3 = "score: " + str(correct_count*1.0/len(ANSWER_KEY)*100)+""
font = cv.FONT_HERSHEY_SIMPLEX
cv.putText(ox_sheet, text1 + " " + text2+" "+text3, (10, 30), font, 0.5, (0, 0, 255), 2)
cv.imshow("score", ox_sheet)
break
cv.waitKey(0)源码已经上传我的github上,欢迎大家fork学习.
https://github.com/qindongliang/answer_sheet_scan