Ros—四轮小车UDRF模型优化xacro
由于 ROS 对 *.urdf 文件的支持不是很好,因此使用宏定义的,拓展性、兼容性较好 *.xacro 文件替换 *.urdf 进行优化。
1、创建功能包并编译,创建相关文件夹
功能包mecanum_robot_description

2、udrf文件夹

“mecanum_robot_body.urdf.xacro”文件
"mecanum_robot.urdf.xacro"文件
“gazebo.urdf.xacro”文件
Gazebo/Blue
false
Gazebo/FlatBlack
Gazebo/FlatBlack
Gazebo/FlatBlack
Gazebo/FlatBlack
Gazebo/White
3、rviz
为了能使用指令控制 小车 在 rviz 中的运动,我们可能还需要更改调用的 *.rviz 文件,使调用的 rviz 支持指令操作。
因此使用cp指令将 /opt/ros/kinetic/share/urdf_tutorial 目录下的 urdf.rviz拷贝到项目目录 ~/catkin_ws/src/mecanum——robot_description 下,然后参照 Git 提供的Demo rbx1 的sim.rviz(在 rviz 下的 TurtleBot 的仿真时使用过,文件位置在 rbx1/rbx1_nav 目录下),主要更改部分是将 Fixed Frame 的对象改为 odom。更改部分Visualization Manager到Tools之间.
mecanum_robot.rviz代码如下:
Panels:
- Class: rviz/Displays
Help Height: 78
Name: Displays
Property Tree Widget:
Expanded:
- /Global Options1
- /Status1
Splitter Ratio: 0.5
Tree Height: 565
- Class: rviz/Selection
Name: Selection
- Class: rviz/Tool Properties
Expanded:
- /2D Pose Estimate1
- /2D Nav Goal1
- /Publish Point1
Name: Tool Properties
Splitter Ratio: 0.588679
- Class: rviz/Views
Expanded:
- /Current View1
Name: Views
Splitter Ratio: 0.5
- Class: rviz/Time
Experimental: false
Name: Time
SyncMode: 0
SyncSource: ""
Visualization Manager:
Class: ""
Displays:
- Alpha: 0.5
Cell Size: 0.5
Class: rviz/Grid
Color: 160; 160; 164
Enabled: true
Line Style:
Line Width: 0.03
Value: Lines
Name: Grid
Normal Cell Count: 0
Offset:
X: 0
Y: 0
Z: 0
Plane: XY
Plane Cell Count: 20
Reference Frame: odom
Value: true
- Angle Tolerance: 0.05
Class: rviz/Odometry
Color: 221; 200; 14
Enabled: true
Keep: 100
Length: 0.6
Name: Odometry
Position Tolerance: 0.1
Topic: /odom
Value: true
- Angle Tolerance: 0.1
Class: rviz/Odometry
Color: 253; 124; 0
Enabled: false
Keep: 100
Length: 0.6
Name: Odometry EKF
Position Tolerance: 0.1
Topic: /odom
Value: false
- Alpha: 1
Class: rviz/RobotModel
Collision Enabled: false
Enabled: true
Links:
All Links Enabled: true
Expand Joint Details: false
Expand Link Details: false
Expand Tree: false
Link Tree Style: Links in Alphabetic Order
base_link:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
left_front_wheel:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
right_front_wheel:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
left_back_wheel:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
right_back_wheel:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
Name: RobotModel
Robot Description: robot_description
TF Prefix: ""
Update Interval: 0
Value: true
Visual Enabled: true
Enabled: true
Global Options:
Background Color: 31; 31; 31
Fixed Frame: odom
Frame Rate: 30
Name: root
Tools:
- Class: rviz/Interact
Hide Inactive Objects: true
- Class: rviz/MoveCamera
- Class: rviz/Select
- Class: rviz/FocusCamera
- Class: rviz/Measure
- Class: rviz/SetInitialPose
Topic: /initialpose
- Class: rviz/SetGoal
Topic: /move_base_simple/goal
- Class: rviz/PublishPoint
Single click: true
Topic: /clicked_point
Value: true
Views:
Current:
Class: rviz/Orbit
Distance: 10
Focal Point:
X: 0
Y: 0
Z: 0
Name: Current View
Near Clip Distance: 0.01
Pitch: 0.465398
Target Frame:
Value: Orbit (rviz)
Yaw: 0.885398
Saved: ~
Window Geometry:
Displays:
collapsed: false
Height: 882
Hide Left Dock: false
Hide Right Dock: false
QMainWindow State: 000000ff00000000fd00000004000000000000013c000002c4fc0200000008fb0000001200530065006c0065006300740069006f006e00000001e10000009b0000006400fffffffb0000001e0054006f006f006c002000500072006f007000650072007400690065007302000001ed000001df00000185000000a3fb000000120056006900650077007300200054006f006f02000001df000002110000018500000122fb000000200054006f006f006c002000500072006f0070006500720074006900650073003203000002880000011d000002210000017afb000000100044006900730070006c0061007900730100000028000002c4000000dd00fffffffb0000002000730065006c0065006300740069006f006e00200062007500660066006500720200000138000000aa0000023a00000294fb00000014005700690064006500530074006500720065006f02000000e6000000d2000003ee0000030bfb0000000c004b0069006e0065006300740200000186000001060000030c00000261000000010000010f000002c4fc0200000003fb0000001e0054006f006f006c002000500072006f00700065007200740069006500730100000041000000780000000000000000fb0000000a005600690065007700730100000028000002c4000000b000fffffffb0000001200530065006c0065006300740069006f006e010000025a000000b200000000000000000000000200000490000000a9fc0100000001fb0000000a00560069006500770073030000004e00000080000002e10000019700000003000004b00000003efc0100000002fb0000000800540069006d00650100000000000004b0000002f600fffffffb0000000800540069006d0065010000000000000450000000000000000000000259000002c400000004000000040000000800000008fc0000000100000002000000010000000a0054006f006f006c00730100000000ffffffff0000000000000000
Selection:
collapsed: false
Time:
collapsed: false
Tool Properties:
collapsed: false
Views:
collapsed: false
Width: 1216
X: 53
Y: 60 4、launch文件

“mecanum_robot_display.rviz.launch”
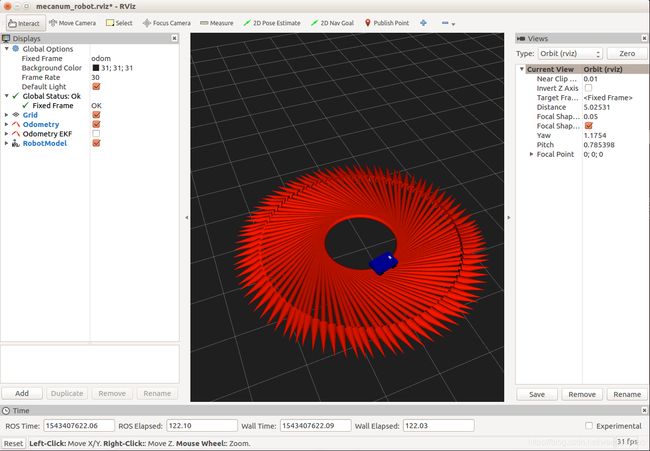
5、测试
本人主机为树莓派,所以rosmaster在主机运行,从机执行如下:
$ roslaunch mecanum_robot_description mecanum_robot_display.rviz.launch另一终端:
$ rostopic pub -r 10 /cmd_vel geometry_msgs/Twist '{linear: {x: 0.4, y: 0, z: 0}, angular: {x: 0, y: 0, z: 0.4}}'
结果如下:
补充:
config文件夹文件参考:
mecanum_robot_arbotix.yaml
port: /dev/ttyUSB0
baud: 115200
rate: 20
sync_write: True
sync_read: True
read_rate: 20
write_rate: 20
controllers: {
# Pololu motors: 1856 cpr = 0.3888105m travel = 4773 ticks per meter (empirical: 4100)
base_controller: {type: diff_controller, base_frame_id: base_link, base_width: 0.26, ticks_meter: 4100, Kp: 12, Kd: 12, Ki: 0, Ko: 50, accel_limit: 1.0 }
}