ROS学习第三节20181228
ROS学习第三节
- URDF机器人建模
- launch文件书写
- 必备知识:
- 建模launch
- urdf文件
- urdf文件简述
- 使用urdf_to_graphiz生成urdf的link和joint关系位置图
- urdf文件的缺陷:
- xacro文件(对urdf文件缺陷进行改进)
- 常量与数学运算
- 宏定义
- 具体使用如下:
- 调用宏(新建mbot.xacro文件,内容如下)
- xacro文件显示
- 方法一:将xacro文件转化为urdf文件后显示
- 方法二(常用方法):直接调用xacro解析器
- ArbotiX+rviz功能仿真
- 创建launch文件
- 创建yaml文件
- 启动该launch文件
- 启动键盘控制
- Gazebo物理仿真环境搭建
- 配置物理仿真模型
- 创建仿真环境
- 传感器仿真
- 摄像头仿真
https://www.ncnynl.com/archives/201610/1033.html
URDF机器人建模
$ catkin_create_pkg mbot_description urdf xacro
#(后面两个是创建该功能包所要依赖的功能包)
mbot_description下的文件夹
| 文件夹 | 作用 |
|---|---|
| ufdf | 存放机器人模型的URDF或xacro文件 |
| meshes | 放置UFDF中引用的模型渲染文件(可通过三维软件导出三维纹理信息) |
| launch | 存放启动文件 |
| config | 保存rviz配置文件 |
launch文件书写
必备知识:
1.ROS 中的param和rosparam标签:设置ROS系统运行中的参数,存储在参数服务器中(在ROS系统中建立全局变量)
2.param用于设置单独比较少的全局变量
param标签介绍
<param name="robot_description" value="$(find mbot_description)/urdf/mbot_base.urdf" />
3.rosparam用于设置多个全局变量时,把所有变量存放在params.yaml文件中
<rosparam file="params.yaml" command="load" ns="params" />#ns是设置命名空间,避免同其他参数有冲突
4.arg是launch文件内部的局部变量,仅限launch文件使用
定义
<arg name="foo" default="arg-value">
使用
<node name="node" pkg="package" type="type" args="$(arg foo)">
建模launch
<launch>
<!-- 通过定义全局变量,告知launch文件启动时把全局变量robot_description中存储的模型文件加载到rviz中 -->
<param name="robot_description" textfile="$(find mbot_description)/urdf/mbot_base.urdf" />
<!-- 设置GUI参数,显示关节控制插件(可以把这个插件同下面节点看成一个整体,用于控制关节运动) -->
<param name="use_gui" value="true"/>
<!-- 运行joint_state_publisher节点,发布机器人的关节状态(显示关节旋转了多少度等等) -->
<node name="joint_state_publisher" pkg="joint_state_publisher" type="joint_state_publisher" />
<!-- 运行robot_state_publisher节点,发布tf(根据上面的关节状态,创建整个机器人的tf关系,并发布到系统中)-->
<node name="robot_state_publisher" pkg="robot_state_publisher" type="state_publisher" />
<!-- 运行rviz可视化界面(args的参数作用类似于自定义rviz中的显示设置) -->
<node name="rviz" pkg="rviz" type="rviz" args="-d $(find mbot_description)/config/mbot_urdf.rviz" required="true" />
</launch>
urdf文件
urdf文件简述
| 关节类型 | 描述 |
|---|---|
| continuous | 无限旋转关节 |
| revolute | 有角度极限的旋转关节 |
| prismatic | 沿某一轴线滑动,带位置极限的滑动关节 |
| planar | 平面关节,可以在平面正交方向上平移或旋转 |
| floating | 浮动关节,允许平移、旋转运动的关节 |
| fixed | 固定关节,不允许运动的特殊关节 |
<?xml version="1.0" ?>
<robot name="mbot">
<link name="base_link">
<visual>
<origin xyz=" 0 0 0" rpy="0 0 0" />
<geometry>
<cylinder length="0.16" radius="0.20"/>
</geometry>
<material name="yellow">
<color rgba="1 0.4 0 1"/>
</material>
</visual>
</link>
<joint name="left_wheel_joint" type="continuous">
<origin xyz="0 0.19 -0.05" rpy="0 0 0"/>
<parent link="base_link"/>
<child link="left_wheel_link"/>
<axis xyz="0 1 0"/>#定义(0 0.19 -0.05)位置上绕y轴旋转的joint
</joint>
<link name="left_wheel_link">
<visual>
<origin xyz="0 0 0" rpy="1.5707 0 0" />#以上面joint的坐标系为参照
<geometry>
<cylinder radius="0.06" length = "0.025"/>
</geometry>
<material name="white">
<color rgba="1 1 1 0.9"/>
</material>
</visual>
</link>
、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、#省略
<link name="kinect_link">
<visual>
<origin xyz="0 0 0" rpy="0 0 1.5708"/>
<geometry>
<mesh filename="package://mbot_description/meshes/kinect.dae" />#dae文件是kinect的描述文件(删掉)
</geometry>
</visual>
</link>
<joint name="kinect_joint" type="fixed">
<origin xyz="0.15 0 0.11" rpy="0 0 0"/>
<parent link="base_link"/>
<child link="kinect_link"/>
</joint>
</robot>
....
需要是什么模型,找到该dae文件

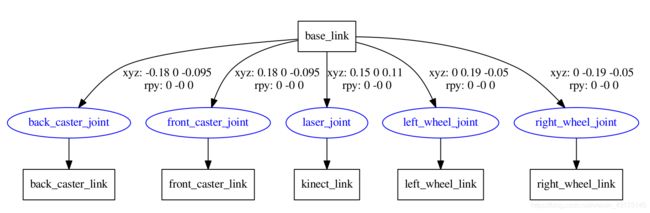
使用urdf_to_graphiz生成urdf的link和joint关系位置图
➜ ~ cd My_First_catkin_ws/src/mbot_description/urdf
➜ urdf urdf_to_graphiz mbot_base.urdf
Created file mbot.gv
Created file mbot.pdf
➜ urdf
mbot.pdf内容如下
urdf文件的缺陷:
1.模型冗长,重复内容过多
2.参数修改麻烦,不便于二次开发;
3.没有参数计算功能
xacro文件(对urdf文件缺陷进行改进)
常量与数学运算
常量定义
<xacro:property name="M_PI" value="3.1415"/>
常量使用
#花括号里面可以进行数学运算,所有数学运算都会被转换浮点数进行,以保证进度
<origin xyz="0 0 0" rpy="${M_PI/2} 0 0">
宏定义
宏定义
<xacro:macro name="name" params="A B C">
....
</xacro:macro>
宏使用
<name A="A_value" B="B_value" C="value"/>
具体使用如下:
<?xml version="1.0"?>
<robot name="mbot" xmlns:xacro="http://www.ros.org/wiki/xacro">
<!-- PROPERTY LIST -->
<xacro:property name="M_PI" value="3.141592653"/>
<xacro:property name="base_radius" value="0.2"/>
<xacro:property name="base_length" value="0.16"/>
<xacro:property name="wheel_radius" value="0.06"/>
<xacro:property name="wheel_length" value="0.025"/>
<xacro:property name="wheel_joint_y" value="0.19"/>
<xacro:property name="wheel_joint_z" value="0.05"/>
<xacro:property name="caster_radius" value="0.015"/>
<xacro:property name="caster_joint_x" value="0.18"/>
<!-- Defining the colors used in this robot -->
<material name="yellow">
<color rgba="1 0.4 0 1"/>
</material>
<material name="black">
<color rgba="0 0 0 0.95"/>
</material>
<material name="grey">
<color rgba="0.75 0.75 0.75 1"/>
</material>
<!-- Macro for robot wheel -->
<xacro:macro name="wheel" params="prefix reflect">
<joint name="${prefix}_wheel_joint" type="continuous">
<origin xyz="0 ${reflect*wheel_joint_y} ${-wheel_joint_z}" rpy="0 0 0"/>
<parent link="base_link"/>
<child link="${prefix}_wheel_link"/>
<axis xyz="0 1 0"/>
</joint>
<link name="${prefix}_wheel_link">
<visual>
<origin xyz="0 0 0" rpy="${M_PI/2} 0 0" />
<geometry>
<cylinder radius="${wheel_radius}" length = "${wheel_length}"/>
</geometry>
<material name="grey"/>
</visual>
</link>
</xacro:macro>
<!-- Macro for robot caster -->
<xacro:macro name="caster" params="prefix reflect">
<joint name="${prefix}_caster_joint" type="continuous">
<origin xyz="${reflect*caster_joint_x} 0 -0.095" rpy="0 0 0"/>
<parent link="base_link"/>
<child link="${prefix}_caster_link"/>
<axis xyz="0 1 0"/>
</joint>
<link name="${prefix}_caster_link">
<visual>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<sphere radius="${caster_radius}" />
</geometry>
<material name="black"/>
</visual>
</link>
</xacro:macro>
<xacro:macro name="mbot_base">
<link name="base_footprint">
<visual>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<box size="0.001 0.001 0.001"/>
</geometry>
</visual>
</link>
<joint name="base_footprint_joint" type="fixed">
<origin xyz="0 0 ${base_length/2+caster_radius*2}" rpy="0 0 0"/>
<parent link="base_footprint"/>
<child link="base_link"/>
<axis xyz="0 1 0"/>
</joint>
<link name="base_link">
<visual>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<cylinder length="${base_length}" radius="${base_radius}"/>
</geometry>
<material name="yellow"/>
</visual>
</link>
<wheel prefix="left" reflect="1"/>
<wheel prefix="right" reflect="-1"/>
<caster prefix="front" reflect="1"/>
<caster prefix="back" reflect="-1"/>
</xacro:macro>
</robot>
由上可知,这个文件全部是属于宏定义,并没有调用宏(这么做的原因:把这个车体整体当成一个部件,同其它部件一块被调用)
调用宏(新建mbot.xacro文件,内容如下)
<?xml version="1.0"?>
<robot name="arm" xmlns:xacro="http://www.ros.org/wiki/xacro">
<xacro:include filename="$(find mbot_description)/urdf/xacro/mbot_base.xacro"/>
<mbot_base/>
<link name="kinect_link">
<visual>
<origin xyz="0 0 0" rpy="0 0 1.5708"/>
<geometry>
<mesh filename="package://mbot_description/meshes/kinect.dae" />
</geometry>
</visual>
</link>
<joint name="laser_joint" type="fixed">
<origin xyz="0.15 0 0.11" rpy="0 0 0"/>
<parent link="base_link"/>
<child link="kinect_link"/>
</joint>
</robot>
将kinect文件放在mbot_description/meshes里
xacro文件显示
方法一:将xacro文件转化为urdf文件后显示
➜ ~ cd My_First_catkin_ws/src/mbot_description/urdf/xacro
➜ xacro rosrun xacro xacro.py mbot.xacro > mbot.urdf
方法二(常用方法):直接调用xacro解析器
在launch文件中使用xacro解析器
<launch>
<!-- 添加xacro功能包下的xacro解析器来解析.xacro文件 -->
<arg name="model" default="$(find xacro)/xacro --inorder '$(find mbot_description)/urdf/xacro/mbot.xacro'"/>
<arg name="gui" default="true"/>
<param name="robot_description" command="$(arg model)"/>
<!-- 设置GUI参数,显示关节控制插件 -->
<param name="use_gui" value="$(arg gui)"/>
<!-- 运行joint_state_publisher节点,发布机器人的关节状态 -->
<node name="joint_state_publisher" pkg="joint_state_publisher" type="joint_state_publisher"/>
<!-- 运行robot_state_publisher节点,发布tf -->
<node name="robot_state_publisher" pkg="robot_state_publisher" type="robot_state_publisher"/>
<!-- 运行rviz可视化界面 -->
<node name="rviz" pkg="rviz" type="rviz" args="-d $(find mbot_description)/config/mbot_urdf.rviz" required="true" />
</launch>
ArbotiX+rviz功能仿真
安装ArbotiX(给予kinetic)
➜ ~ cd My_First_catkin_ws/src
➜ src git clone https://github.com/vanadiumlabs/arbotix_ros.git
➜ src cd ..
➜ My_First_catkin_ws catkin_make
注意:arbotix_ros中的python文件需要添加可执行文件权限
➜ My_First_catkin_ws cd src/arbotix_ros
➜ arbotix_ros git:(indigo-devel) cd arbotix_python/bin
➜ bin git:(indigo-devel) ls
arbotix_driver arbotix_gui arbotix_terminal
➜ bin git:(indigo-devel) sudo chmod +x arbotix_driver
创建launch文件
名为arbotix_mbot_base_xacro.launch,内容如下
<launch>
<arg name="model" default="$(find xacro)/xacro --inorder '$(find mbot_description)/urdf/xacro/mbot.xacro'"/>
<arg name="gui" default="true"/>
<param name="robot_description" command="$(arg model)"/>
<!-- 设置GUI参数,显示关节控制插件 -->
<param name="use_gui" value="$(arg gui)"/>
<node name="arbotix" pkg="arbotix_python" type="arbotix_driver" output="screen">
<rosparam file="$(find mbot_description)/config/fake_mbot_arbotix.yaml" command="load"/>
<param name="sim" value="true"/>
</node>
<!-- 运行joint_state_publisher节点,发布机器人的关节状态 -->
<node name="joint_state_publisher" pkg="joint_state_publisher" type="joint_state_publisher"/>
<!-- 运行robot_state_publisher节点,发布tf -->
<node name="robot_state_publisher" pkg="robot_state_publisher" type="robot_state_publisher"/>
<!-- 运行rviz可视化界面 -->
<node name="rviz" pkg="rviz" type="rviz" args="-d $(find mbot_description)/config/mbot_arbotix.rviz.rviz" required="true" />
</launch>
创建yaml文件
在config中创建fake_mbot_arbotix.yaml(格式一定是这样)
controllers: {
base_controller: {
type: diff_controller,
base_frame_id: base_footprint,
base_width: 0.26,
ticks_meter: 4100,
Kp: 12,
Kd: 12,
Ki: 0,
Ko: 50,
accel_limit: 1.0
}
}
启动该launch文件
➜ launch roslaunch arbotix_mbot_base_xacro.launch
启动键盘控制
➜ launch roslaunch arbotix_mbot_base_xacro.launch
Gazebo物理仿真环境搭建
配置物理仿真模型
1.为link添加惯性参数
2.为link添加gazebo标签,之前设置的颜色是在rviz中显示,但是无法在gazebo中显示
建立xacro文件如下
3.为joint添加传动装置
4.添加gazebo控制器插件(相当于驱动板1)
<?xml version="1.0"?>
<robot name="mbot" xmlns:xacro="http://www.ros.org/wiki/xacro">
<!-- PROPERTY LIST -->
<xacro:property name="M_PI" value="3.1415926"/>
<xacro:property name="base_mass" value="20" />
<xacro:property name="base_radius" value="0.20"/>
<xacro:property name="base_length" value="0.16"/>
<xacro:property name="wheel_mass" value="2" />
<xacro:property name="wheel_radius" value="0.06"/>
<xacro:property name="wheel_length" value="0.025"/>
<xacro:property name="wheel_joint_y" value="0.19"/>
<xacro:property name="wheel_joint_z" value="0.05"/>
<xacro:property name="caster_mass" value="0.5" />
<xacro:property name="caster_radius" value="0.015"/> <!-- wheel_radius - ( base_length/2 - wheel_joint_z) -->
<xacro:property name="caster_joint_x" value="0.18"/>
<!-- Defining the colors used in this robot -->
<material name="yellow">
<color rgba="1 0.4 0 1"/>
</material>
<material name="black">
<color rgba="0 0 0 0.95"/>
</material>
<material name="gray">
<color rgba="0.75 0.75 0.75 1"/>
</material>
<!-- Macro for inertia matrix -->
<xacro:macro name="sphere_inertial_matrix" params="m r">
<inertial>
<mass value="${m}" />
<inertia ixx="${2*m*r*r/5}" ixy="0" ixz="0"
iyy="${2*m*r*r/5}" iyz="0"
izz="${2*m*r*r/5}" />
</inertial>
</xacro:macro>
<xacro:macro name="cylinder_inertial_matrix" params="m r h">
<inertial>
<mass value="${m}" />
<inertia ixx="${m*(3*r*r+h*h)/12}" ixy = "0" ixz = "0"
iyy="${m*(3*r*r+h*h)/12}" iyz = "0"
izz="${m*r*r/2}" />
</inertial>
</xacro:macro>
<!-- Macro for robot wheel -->
<xacro:macro name="wheel" params="prefix reflect">
<joint name="${prefix}_wheel_joint" type="continuous">
<origin xyz="0 ${reflect*wheel_joint_y} ${-wheel_joint_z}" rpy="0 0 0"/>
<parent link="base_link"/>
<child link="${prefix}_wheel_link"/>
<axis xyz="0 1 0"/>
</joint>
<link name="${prefix}_wheel_link">
<visual>
<origin xyz="0 0 0" rpy="${M_PI/2} 0 0" />
<geometry>
<cylinder radius="${wheel_radius}" length = "${wheel_length}"/>
</geometry>
<material name="gray" />
</visual>
<collision>
<origin xyz="0 0 0" rpy="${M_PI/2} 0 0" />
<geometry>
<cylinder radius="${wheel_radius}" length = "${wheel_length}"/>
</geometry>
</collision>
<cylinder_inertial_matrix m="${wheel_mass}" r="${wheel_radius}" h="${wheel_length}" />
</link>
<gazebo reference="${prefix}_wheel_link">
<material>Gazebo/Gray</material>
</gazebo>
<!-- Transmission is important to link the joints and the controller -->
<transmission name="${prefix}_wheel_joint_trans">
<type>transmission_interface/SimpleTransmission</type>
<joint name="${prefix}_wheel_joint" >
<hardwareInterface>hardware_interface/VelocityJointInterface</hardwareInterface>
</joint>
<actuator name="${prefix}_wheel_joint_motor">
<hardwareInterface>hardware_interface/VelocityJointInterface</hardwareInterface>
<mechanicalReduction>1</mechanicalReduction>
</actuator>
</transmission>
</xacro:macro>
<!-- Macro for robot caster -->
<xacro:macro name="caster" params="prefix reflect">
<joint name="${prefix}_caster_joint" type="continuous">
<origin xyz="${reflect*caster_joint_x} 0 ${-(base_length/2 + caster_radius)}" rpy="0 0 0"/>
<parent link="base_link"/>
<child link="${prefix}_caster_link"/>
<axis xyz="0 1 0"/>
</joint>
<link name="${prefix}_caster_link">
<visual>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<sphere radius="${caster_radius}" />
</geometry>
<material name="black" />
</visual>
<collision>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<sphere radius="${caster_radius}" />
</geometry>
</collision>
<sphere_inertial_matrix m="${caster_mass}" r="${caster_radius}" />
</link>
<gazebo reference="${prefix}_caster_link">
<material>Gazebo/Black</material>
</gazebo>
</xacro:macro>
<xacro:macro name="mbot_base_gazebo">
<link name="base_footprint">
<visual>
<origin xyz="0 0 0" rpy="0 0 0" />
<geometry>
<box size="0.001 0.001 0.001" />
</geometry>
</visual>
</link>
<gazebo reference="base_footprint">
<turnGravityOff>false</turnGravityOff>
</gazebo>
<joint name="base_footprint_joint" type="fixed">
<origin xyz="0 0 ${base_length/2 + caster_radius*2}" rpy="0 0 0" />
<parent link="base_footprint"/>
<child link="base_link" />
</joint>
<link name="base_link">
<visual>
<origin xyz=" 0 0 0" rpy="0 0 0" />
<geometry>
<cylinder length="${base_length}" radius="${base_radius}"/>
</geometry>
<material name="yellow" />
</visual>
<collision>
<origin xyz=" 0 0 0" rpy="0 0 0" />
<geometry>
<cylinder length="${base_length}" radius="${base_radius}"/>
</geometry>
</collision>
<cylinder_inertial_matrix m="${base_mass}" r="${base_radius}" h="${base_length}" />
</link>
<gazebo reference="base_link">
<material>Gazebo/Blue</material>
</gazebo>
<wheel prefix="left" reflect="-1"/>
<wheel prefix="right" reflect="1"/>
<caster prefix="front" reflect="-1"/>
<caster prefix="back" reflect="1"/>
<!-- controller -->
<gazebo>
<plugin name="differential_drive_controller"
filename="libgazebo_ros_diff_drive.so">
<rosDebugLevel>Debug</rosDebugLevel>
<publishWheelTF>true</publishWheelTF>
<robotNamespace>/</robotNamespace>
<publishTf>1</publishTf>
<publishWheelJointState>true</publishWheelJointState>
<alwaysOn>true</alwaysOn>
<updateRate>100.0</updateRate>
<legacyMode>true</legacyMode>
<leftJoint>left_wheel_joint</leftJoint>
<rightJoint>right_wheel_joint</rightJoint>
<wheelSeparation>${wheel_joint_y*2}</wheelSeparation>
<wheelDiameter>${2*wheel_radius}</wheelDiameter>
<broadcastTF>1</broadcastTF>
<wheelTorque>30</wheelTorque>
<wheelAcceleration>1.8</wheelAcceleration>
<commandTopic>cmd_vel</commandTopic>
<odometryFrame>odom</odometryFrame>
<odometryTopic>odom</odometryTopic>
<robotBaseFrame>base_footprint</robotBaseFrame>
</plugin>
</gazebo>
</xacro:macro>
</robot>
创建仿真环境
1.直接添加环境模型
2.使用Building Editor
传感器仿真
摄像头仿真
<gazebo reference="${prefix}_link">#把之前定义的link仿真成摄像头
<sensor type="camera" name="camera_node">
<update_rate>30.0</update_rate>#摄像头一秒钟发布30次图像信息
<camera name="head">
<horizontal_fov>1.3962634</horizontal_fov>#可视的范围
<image>
<width>1280</width>
<height>720</height>
<format>R8G8B8</format>
</image>
<clip>
<near>0.02</near>#最近距离
<far>300</far>#最远距离
</clip>
<noise>
<type>gaussian</type>#模拟摄像头噪声,高斯噪声
<mean>0.0</mean>
<stddev>0.007</stddev>
</noise>
</camera>
<plugin name="gazebo_camera" filename="libgazebo_ros_camera.so">#加载gazebo插件
<alwaysOn>true</alwaysOn>
<updateRate>0.0</updateRate>
<cameraName>/camera</cameraName>
<imageTopicName>image_raw</imageTopicName>#发布的话题名
<cameraInfoTopicName>camera_info</cameraInfoTopicName>
<frameName>camera_link</frameName>
<hackBaseline>0.07</hackBaseline>
<distortionK1>0.0</distortionK1>
<distortionK2>0.0</distortionK2>
<distortionK3>0.0</distortionK3>
<distortionT1>0.0</distortionT1>
<distortionT2>0.0</distortionT2>
</plugin>
</sensor>
</gazebo>
在xacro文件中为传感器
1.添加sensor标签(描述传感器 )
2.添加标签(描述摄像头参数)
3.添加标签(加载摄像头仿真插件libgazebo_ros_camera.so)