打开gazebo进入baxter仿真环境运行简单例子
1、前记:为了尽快在ROS中操作Baxter机器人,需要可以的下载https://download.csdn.net/download/weixin_39090239/10726734
以下为学习中的记录一些记录,主要是遇到的一些问题和解决办法。
2、如果环境准备好了的话(按照rethiink官网安装步骤http://sdk.rethinkrobotics.com/wiki/Workstation_Setup),至少有如下的ros_ws文件夹存在。打开终端Ctrl+Alt+T,输入roscore会出现【/rosout】。
3、接下来打开终端Ctrl+Alt+T进入工作空间:cd ros_ws
链接仿真环境: ./baxter.sh sim
开启gazebo: roslaunch baxter_gazebo baxter_world.launch
出现错误:[gazebo-2] process has died [pid 106436, exit code 134, cmd /opt/ros/indigo/lib/gazebo_ros/gzserver -e ode /home/math/ros_ws/src/baxter_simulator/baxter_gazebo/worlds/baxter.world __name:=gazebo __log:=/home/math/.ros/log/64bfbe4e-d1e0-11e8-9fdc-000c29421309/gazebo-2.log].
log file: /home/math/.ros/log/64bfbe4e-d1e0-11e8-9fdc-000c29421309/gazebo-2*.log
Aborted (core dumped)
[gazebo_gui-3] process has died [pid 106440, exit code 134, cmd /opt/ros/indigo/lib/gazebo_ros/gzclient __name:=gazebo_gui __log:=/home/math/.ros/log/64bfbe4e-d1e0-11e8-9fdc-000c29421309/gazebo_gui-3.log].
log file: /home/math/.ros/log/64bfbe4e-d1e0-11e8-9fdc-000c29421309/gazebo_gui-3*.log
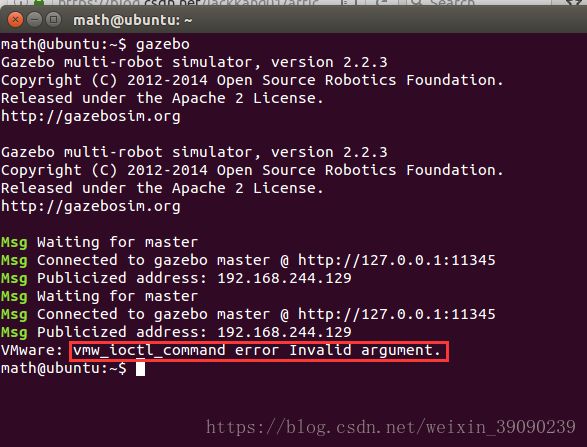
解决:关掉所有终端,打开一个新的终端输入gazebo也无效(如下),
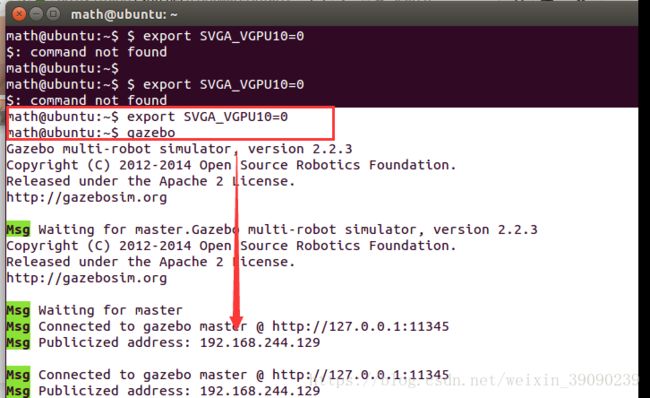
这时候我在终端下设置环境变量为0输入:export SVGA_VGPU10=0
再次输入gazebo就可以打开仿真环境了。
最后关掉gazebo环境,再次执行步骤3的三个步骤:注意最好代码键入,不要复制粘贴,因为有时候用Tab键可以快速找到相关的代码命令!!!
进入工作空间:cd ros_ws
链接仿真环境: ./baxter.sh sim
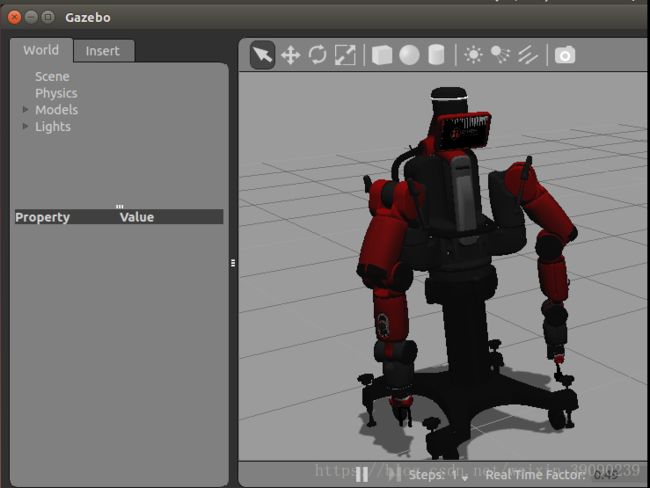
开启gazebo: roslaunch baxter_gazebo baxter_world.launch
就可以看到心心念念的Baxter了。
4、运行(实例)控制仿真器中的机器人
1)可能需要在某个程序文件中修改代码吧,每次运行实例之前都需要在新的终端输入3的步骤(目的就是运行实例时,实例必须在你的目录下,否者找不到对应的文件)如下:

关键代码:
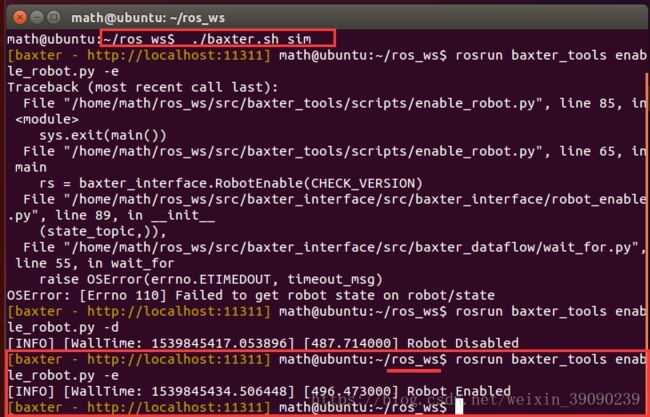
进入工作空间:cd ros_ws
链接仿真环境: ./baxter.sh sim
机器人使能:rosrun baxter_tools enable_robot.py -e
键盘控制:rosrun baxter_examples joint_position_keyboard.py
如下结果:
总结:如果所有环境配置好了之后,想运行实例中的程序 .py格式,在终端键入代码:
1)初始化,在终端下设置环境变量为0输入:export SVGA_VGPU10=0 (运行gazebo或rviz时出现VMware: vmw_ioctl_command error 无效的参数. 这个错误时常用到这个命令,貌似虚拟机上都会这样!!!不知是否是运行内存的问题!?)
2)继续,进入工作空间:cd ros_ws
链接仿真环境: ./baxter.sh sim
开启gazebo: roslaunch baxter_gazebo baxter_world.launch
3)打开仿真器后,重新打开一个终端键入代码:
进入工作空间:cd ros_ws
链接仿真环境: ./baxter.sh sim
机器人使能:rosrun baxter_tools enable_robot.py -e
机器人键盘控制:rosrun baxter_examples joint_position_keyboard.py
以上。。。。