线性变换
线性变换
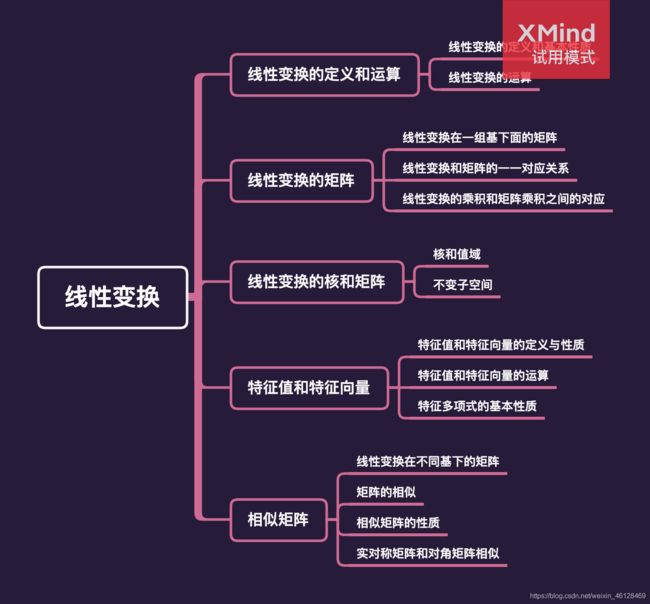
线性变换的定义和运算
定义
定义:
设 V V V是数域 F F F上的线性空间. σ \sigma σ是 V V V的一个变换。如果满足条件:
( 1 ) ∀ α , β ∈ V , σ ( α + β ) = σ ( α ) + σ ( β ) ; (1)\forall \alpha,\beta\in V,\sigma(\alpha+\beta)=\sigma(\alpha)+\sigma(\beta); (1)∀α,β∈V,σ(α+β)=σ(α)+σ(β);
( 2 ) ∀ k ∈ F , α ∈ V , σ ( k α ) = k σ ( α ) (2)\forall k\in F,\alpha\in V ,\sigma(k\alpha)=k\sigma (\alpha) (2)∀k∈F,α∈V,σ(kα)=kσ(α) ,
则称 σ \sigma σ是 V V V上的线性变换或线性算子。
几个特殊的线性变换:
数乘变换\位拟变换
零变换( ο \omicron ο)
恒等变换( ϵ \epsilon ϵ)
线性变换的四个基本性质:
(1) σ ( θ ) = θ \sigma(\theta)=\theta σ(θ)=θ
(2) σ ( − α ) = − σ ( α ) \sigma(-\alpha)=-\sigma(\alpha) σ(−α)=−σ(α)
(3)线性变换保持向量的线性组合关系不变。即:
$\beta=k_1\alpha_1+k_2\alpha_2+\cdots+k_s\alpha_s \Rightarrow \sigma\beta=k_1\sigma\alpha_1+k_2\sigma\alpha_2+\cdots+k_s\sigma\alpha_s $。
(4)线性变换将线性相关的向量组映成线性相关的向量组。
运算
运算相关定义:
设 σ , τ ∈ L ( V ) \sigma,\tau \in L(V) σ,τ∈L(V),他们的和 σ , τ \sigma,\tau σ,τ定义为
( σ + τ ) ( α ) = σ ( α ) + τ ( α ) , ∀ α ∈ V (\sigma+\tau)(\alpha)=\sigma(\alpha)+\tau(\alpha),\forall \alpha\in V (σ+τ)(α)=σ(α)+τ(α),∀α∈V.
设 σ ∈ L ( V ) \sigma \in L(V) σ∈L(V), k ∈ F k\in F k∈F, k k k与 σ \sigma σ的数量乘法 k σ k\sigma kσ定义为: ( k σ ) ( α ) = k σ ( α ) , ∀ α ∈ V (k\sigma)(\alpha)=k\sigma(\alpha),\forall \alpha\in V (kσ)(α)=kσ(α),∀α∈V.
设 σ ∈ L ( V ) \sigma\in L(V) σ∈L(V),如果存在 τ ∈ L ( V ) \tau\in L(V) τ∈L(V),使得
σ τ = τ σ = ϵ \sigma \tau=\tau \sigma=\epsilon στ=τσ=ϵ,
则称是 σ \sigma σ可逆的,称 τ \tau τ为 σ \sigma σ的逆变换。
线性变换的矩阵
线性变换在一组基下的矩阵
定理:
设 σ \sigma σ是n维线性空间 V V V的一个线性变换, α 1 , α 2 , ⋯ , α n \alpha_1,\alpha_2,\cdots,\alpha_n α1,α2,⋯,αn是 V V V的一组基,则 V V V中任一向量 α \alpha α的像 σ ( α ) \sigma(\alpha) σ(α)由基的像 σ ( α 1 ) , σ ( α 2 ) , ⋯ , σ ( α n ) \sigma(\alpha_1),\sigma(\alpha_2),\cdots,\sigma(\alpha_n) σ(α1),σ(α2),⋯,σ(αn)所完全确定。
σ ( α 1 , α 2 , ⋯ , α n ) = ( α 1 , α 2 , ⋯ , α n ) A \sigma(\alpha_1,\alpha_2,\cdots,\alpha_n)=(\alpha_1,\alpha_2,\cdots,\alpha_n)A σ(α1,α2,⋯,αn)=(α1,α2,⋯,αn)A.
n n n阶矩阵 A A A叫做线性变换 σ \sigma σ在基 α 1 , α 2 , ⋯ , α n \alpha_1,\alpha_2,\cdots,\alpha_n α1,α2,⋯,αn下的矩阵.其中 A A A的第 j j j列就是 σ ( α j ) \sigma(\alpha_j) σ(αj)在 α 1 , α 2 , ⋯ , α n \alpha_1,\alpha_2,\cdots,\alpha_n α1,α2,⋯,αn这组基下的坐标。
定理:
设线性变换 σ \sigma σ在基 α 1 , α 2 , ⋯ , α n \alpha_1,\alpha_2,\cdots,\alpha_n α1,α2,⋯,αn下的矩阵是 A A A,向量 α \alpha α, σ ( α ) \sigma(\alpha) σ(α)在这组基下的坐标分别是 x = ( x 1 , x 2 , ⋯ , x n ) T x=(x_1,x_2,\cdots,x_n)^T x=(x1,x2,⋯,xn)T和 y = ( y 1 , y 2 , ⋯ , y n ) T y=(y_1,y_2,\cdots,y_n)^T y=(y1,y2,⋯,yn)T,则:
y = A x . y=Ax. y=Ax.
线性变换与矩阵的一一对应关系
定理:
设 α 1 , α 2 , ⋯ , α n \alpha_1,\alpha_2,\cdots,\alpha_n α1,α2,⋯,αn是 n n n维空间的一组基, A = ( a i j ) A=(a_{ij}) A=(aij)是任一 n n n阶矩阵,则有唯一的线性变换 σ \sigma σ满足:
σ ( α 1 , α 2 , ⋯ , α n ) = ( α 1 , α 2 , ⋯ , α n ) A \sigma(\alpha_1,\alpha_2,\cdots,\alpha_n)=(\alpha_1,\alpha_2,\cdots,\alpha_n)A σ(α1,α2,⋯,αn)=(α1,α2,⋯,αn)A。
定理:
设 V V V是 F F F上 n n n维空间,则 L ( V ) L(V) L(V)与 M n ( F ) M_n(F) Mn(F)同构。*
线性变换的乘积与矩阵乘积之间的对应
定理:
设为 ϕ : L ( V ) → M n ( F ) \phi:L(V)\rightarrow M_n(F) ϕ:L(V)→Mn(F)定理*构造的同构映射,则
∀ σ , τ ∈ L ( V ) , ϕ ( σ τ ) = ϕ ( σ ) ϕ ( τ ) \forall \sigma,\tau\in L(V),\phi(\sigma \tau)=\phi(\sigma)\phi(\tau) ∀σ,τ∈L(V),ϕ(στ)=ϕ(σ)ϕ(τ)
推论:
设 σ ∈ L ( V ) \sigma\in L(V) σ∈L(V), ϕ ( σ ) = A \phi(\sigma)=A ϕ(σ)=A,若 σ \sigma σ可逆,则 A A A是可逆矩阵,且 ϕ ( σ − 1 ) = A − 1 \phi(\sigma^{-1})=A^{-1} ϕ(σ−1)=A−1。反正,如果 A A A可逆,则 σ \sigma σ也可逆。
线性变换的核和矩阵
核与值域
定义
设 σ ∈ L ( V ) \sigma \in L(V) σ∈L(V), σ \sigma σ的全体像的集合称为 σ \sigma σ的值域,计作 I m σ ( σ V ) Im\sigma(\sigma V) Imσ(σV),即:
I m σ = σ V = { σ α ∣ α ∈ V } Im\sigma=\sigma V=\{\sigma\alpha|\alpha\in V\} Imσ=σV={σα∣α∈V}
设 σ ∈ L ( V ) \sigma \in L(V) σ∈L(V),所有被 σ \sigma σ映成零向量的向量的集合称为 σ \sigma σ的核,计作 k e r σ , ker\sigma, kerσ,即
k e r σ = { α ∈ V ∣ σ α = θ } ker\sigma=\{\alpha\in V|\sigma\alpha=\theta\} kerσ={α∈V∣σα=θ}
d i m I m σ dim Im\sigma dimImσ称为线性变换 σ \sigma σ的秩, k e r σ ker\sigma kerσ称为线性变换 σ \sigma σ的零度。
定理
设 σ ∈ L ( V ) \sigma\in L(V) σ∈L(V), ϵ 1 , ϵ 2 , ⋯ , ϵ n \epsilon_1,\epsilon_2,\cdots,\epsilon_n ϵ1,ϵ2,⋯,ϵn是 V V V的一组基, A A A是 σ \sigma σ在这组基下的矩阵,则:
(1) I m σ = L ( σ ϵ 1 , σ ϵ 2 , ⋯ , σ ϵ n ) Im\sigma=L(\sigma\epsilon_1,\sigma\epsilon_2,\cdots,\sigma\epsilon_n) Imσ=L(σϵ1,σϵ2,⋯,σϵn);
(2) σ \sigma σ的秩= A A A的秩
设 σ ∈ L ( V ) \sigma\in L(V) σ∈L(V),则:
d i m V = d i m k e r σ + d i m I m σ dimV=dim ker\sigma+dim Im\sigma dimV=dimkerσ+dimImσ
对于有限维线性空间的线性变换 σ \sigma σ, σ \sigma σ是单射 ⇔ σ \Leftrightarrow\sigma ⇔σ是满射
不变子空间
定义
设 σ ∈ L ( V ) \sigma\in L(V) σ∈L(V), W W W是 V V V的子空间,如果 ∀ α ∈ W \forall\alpha\in W ∀α∈W,都有 σ α ∈ W \sigma\alpha\in W σα∈W,则称 W W W是线性变换 σ \sigma σ的不变子空间。
特征值和特征向量
##特征值与特征向量的定义与性质
定义
设 σ ∈ L ( V ) \sigma\in L(V) σ∈L(V),如果对于 F F F中的数 λ \lambda λ,存在非零向量 ξ \xi ξ,使得
σ ξ = λ ξ , \sigma\xi=\lambda\xi, σξ=λξ,
则称 λ \lambda λ是线性变换 σ \sigma σ的一个特征值, ξ \xi ξ是 σ \sigma σ的属于特征值 λ \lambda λ的特征向量.
属于 λ \lambda λ的特征向量的任意非零线性组合仍是属于 λ \lambda λ的特征向量,因此 σ \sigma σ的属于 λ \lambda λ所有特征向量添加零向量就构成一个 V V V的子空间,计作 V λ V_{\lambda} Vλ:
V λ = { ξ ∈ V ∣ σ ξ = λ ξ } . V_{\lambda}=\{\xi\in V|\sigma\xi=\lambda\xi\}. Vλ={ξ∈V∣σξ=λξ}.
定义:
V λ V_{\lambda} Vλ称为线性变换 σ \sigma σ的属于特征值 λ \lambda λ的特征子空间。特征子空间 V λ V_{\lambda} Vλ的维数叫做特征值 λ \lambda λ的几何重数。
多项式 f A ( λ ) = d e t ( λ I − A ) f_{A}(\lambda)=det(\lambda I-A) fA(λ)=det(λI−A)称为线性变换 σ \sigma σ的特征多项式,它的根称为 σ \sigma σ的特征根。
特征值与特征向量的计算
特征多项式的基本性质
定理:
设 A ∈ M n ( c ) , A\in M_{n}(\mathbb{c}), A∈Mn(c),
(1)KaTeX parse error: Expected group after '_' at position 5: \sum_̲\limits{i=1}^{n…
(2)KaTeX parse error: Expected group after '_' at position 6: \prod_̲\limits{i=1}^{n…
定理:
n n n阶方阵 A A A可逆 ⇔ A \Leftrightarrow A ⇔A的 n n n个特征值全不为零。
定理:
设 A ∈ M n ( F ) A\in Mn(F) A∈Mn(F), f A ( λ ) = ∣ λ I − A ∣ f_{A}(\lambda)=|\lambda I-A| fA(λ)=∣λI−A∣是 A A A的特征多项式,则 f A ( A ) = 0. f_{A}(A)=0. fA(A)=0.
推论:
设 σ ∈ L ( V ) \sigma\in L(V) σ∈L(V), f ( λ ) f(\lambda) f(λ)是 σ \sigma σ的特征多项式,那么 f ( σ ) = 0 f(\sigma)=0 f(σ)=0
相似矩阵
线性变换在不同基下的矩阵
矩阵的相似
定义
设 A , B A,B A,B是两个 n n n阶的方阵,如果存在一个 n n n阶可逆矩阵 P P P,使得:
P − 1 A P = B , P^{-1}AP=B, P−1AP=B,
则称矩阵 B B B相似于矩阵 A A A,计作 B A B~A B A.
相似矩阵的性质
(1)若 A ~ B A~B A~B,则 A m ~ B m A^{m}~B^{m} Am~Bm,其中 m m m是正整数。
(2)若 A ~ B , A~B, A~B,设 f ( x ) f(x) f(x)是一个一元多项式,则 f ( A ) f ( B ) . f(A)~f(B). f(A) f(B).
(3)若 A i ~ B i , i = 1 , 2 , ⋯ , s A_i~B_i,i=1,2,\cdots,s Ai~Bi,i=1,2,⋯,s则
d i a g ( A 1 , A 2 , ⋯ , A s ) ~ d i a g ( B 1 , B 2 , ⋯ , B s ) diag(A_1,A_2,\cdots,A_s)~diag(B_1,B_2,\cdots,B_s) diag(A1,A2,⋯,As)~diag(B1,B2,⋯,Bs)
(4)若 A ~ B , A~B, A~B,且 A A A可逆,则 B B B也可逆,且 A − 1 ~ B − 1 . A^{-1}~B^{-1}. A−1~B−1.
(5)相似矩阵有相同的特征值和相同的特征多项式。
(6)相似矩阵具有相同的迹和相同的行列式。
实对称矩阵和对角阵相似
定理
设 A A A是 n n n阶实对称阵,则 A A A的特征值都是实数。
定理
n n n阶实对称阵 A A A,总存在正交阵 Q Q Q,使得 Q − 1 A Q Q^{-1}AQ Q−1AQ是对角阵。
定理
设 A A A是 n n n阶实对称阵, λ 1 , λ 2 \lambda_1,\lambda_2 λ1,λ2是 A A A的两个相异的特征值, x 1 , x 2 x_1,x_2 x1,x2分别是属于 λ 1 \lambda_1 λ1和 λ 2 \lambda_2 λ2的特征向量,则 x 1 x_1 x1和 x 2 x_2 x2必正交。