对keras.permute_dimensions和numpy.transpose空间维度转置过程的理解(Axis的理解)
keras.permute_dimensions和numpy.transpose,这两个函数的作用是对矩阵进行维度的转置, 具体请参考官方文档,这里只给出矩阵维度转置是怎么理解的?
1. 写在前面
今天遇到一个时间序列分析的任务,使用了Attention机制,看代码之后,有几个空间转置的过程其实有点懵。
所以通过查资料理解了一下空间维度转置,顺便理解了一下三维矩阵的沿着某一个轴的加法,我把自己的理解技巧记录下来,不一定适合每个人,但是如果这样看待转置问题的话,应该知道具体是怎么变的一个过程。
如果你还没明白我说啥,那么我可以举个例子:
A=np.arange(12).reshape([2,3,2])
X=tf.transpose(A,[0,2,1])
Y=tf.transpose(A,[1,0,2])
通过这三行代码,你能一下子反应出X和Y的形状和具体的数值吗?
如果不能,那么我告诉你结果:
A长这个样子, 是一个[2, 3, 2]的三维矩阵
[[[ 0 1]
[ 2 3]
[ 4 5]]
[[ 6 7]
[ 8 9]
[10 11]]]
X是把A的后两个维度进行了转置, X的大小:[2,2,3], 长这个样子:
[[[ 0 2 4]
[ 1 3 5]]
[[ 6 8 10]
[ 7 9 11]]]
Y是把A的前两个维度进行了转置,Y的大小:[3,2,2], 长这个样子:
[[[ 0 1]
[ 6 7]]
[[ 2 3]
[ 8 9]]
[[ 4 5]
[10 11]]]
我们可以发现,判断三维矩阵转置后的形状还是比较好判断的, 无非就是原来的维度大小,转换对应即可。 但是具体的样子我们理解是怎么变过去的吗?
并且如果我两个三维矩阵相加的时候,你能一下子反应出axis=0, 1, -1都是在哪个维度上进行拼接的吗?
# 三维数组
t3 = tf.constant([[[1, 2], [2, 3]], [[4, 4], [5, 3]]])
t4 = tf.constant([[[7, 4], [8, 4]], [[2, 10], [15, 11]]])
with tf.Session() as sess:
# 三维数组针对 axis 为0 和 1 和 -1 的情况
print(sess.run(tf.concat([t3, t4], 0)))
print(sess.run(tf.concat([t3, t4], 1)))
print(sess.run(tf.concat([t3, t4], -1)))
这两个就是我今天分享的,应该怎么理解这个转置的过程和拼接的过程。我这里分享一下我的理解方法,我是通过固定数据,转换视角来理解的, 下面具体说说是什么意思?
2. 三维? 我们还是先从二维来来理解
对于二维矩阵的转置,我相信肯定大家都理解是怎么转的, 比如下面的例子:
A = np.array([[1, 2, 3], [4, 5, 6]])
X = tf.transpose(A, [1, 0]) # 这个地方其实是0维和1维进行了交换
这个我们很容易就会得出答案, A的转置矩阵就是:
[[1 4]
[2 5]
[3 6]]

这个应该大家都会做,但是具体的转变过程,可能我们每个人理解的就不一样了,可能有的人是固定轴,变数字,也有的人固定数字,转变轴。 我就是后者,我对于二维转置问题是这样理解的, 对于二维矩阵来说,我们知道会有axis=0, axis=1两个轴,如果你经常使用numpy和pandas的话,对我说的这一点肯定不陌生,毕竟矩阵拼接, sum加和这些操作都有个axis的属性。 这个其实就是二维矩阵的两个方向,类似x,y轴一般。我的理解是这样子的,横向是axis=1, 纵向是axis=0。
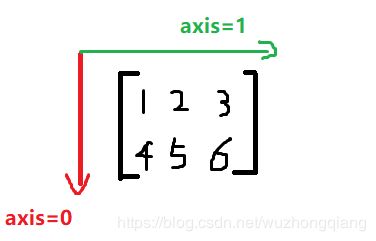
如果你也是这样理解的话,恭喜你,对于二维矩阵的拼接求和,其实就很好理解了,比如np.sum(a, axis=0) 我们很容易就理解这是沿着axis=0的方向加和,结果就是[5, 7, 9], np.sum(a, axis=1), 很容易理解是axis=1的方向加和, 结果[6, 15]。 当然np.concat, 还有pandas的拼接操作都是同理。
这两个轴的目的是锁定视角,就是我观察的角度永远是这个角度(axis=0朝下,axis=1朝着右)
那么这种情况下,做转置怎么理解呢? 我依然是数字不变,观察的角度进行变换, 但是这个观察的角度怎么变的呢? 依赖于这两个轴。 当然只是轴哈,如果轴有含义的话,比如axis=0方向代表样本, axis=1代表特征这种,含义可不能变,只是变个观察的角度罢了。 啥意思呢?
二维转置,其实就是axis=0和axis=1交换一下位置,然后再回到我axis=0朝下, axis=1朝右的视角下观察这个矩阵, 如下图:

这个转变视角的过程,其实相当于我们人走到了这个矩阵的后面,然后头顺时针旋转90度观察的(你可以发挥空间想象力,想象一下这个过程)。
有人可能有疑问,为啥要这么麻烦,我直接数字变一下子不就完了? 嗯嗯, 当然可以,哪个好理解用哪个, 我之所以用后者,是因为三维的情况下,变数字可就不是那么好变了, 不信? 我们就看看三维的情况。
3. 三维下的矩阵转置
我们就看下面这个简单的例子吧:

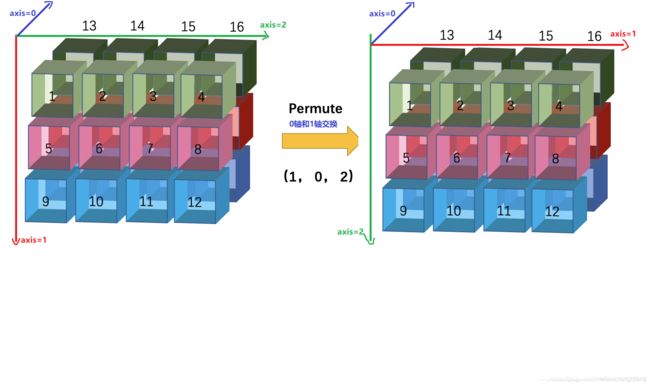
这是一个[2, 3, 4]大小的矩阵,如果我要问,前两个轴(01)交换,你能一下子反应出下面的这个图片吗?

这个转置对应numpy就是np.transpose(x, (1, 0, 2)),,对应keras就是keras.backend.permute_dimensions(x, (1, 0, 2))。
反正我如果是从变换数字的角度看的话,反应不出后面的结果,即使看了一篇博客的描述,也是得寻思半天。 但是如果数字不变,角度变换的技巧理解的话,这个问题就容易想了。
三维的里面,我依然是借助轴的,只不过这次需要三个,并且0,1, 2的方向得是下面这样子:

并且,三个轴的方向不能变,只能从这个视角看待矩阵,这样的话,我们上面的01轴交换位置,就是这样子:

这个时候,就转换角度,想办法让axis=0朝里,axis=1朝下,axis=2朝右, 就相当于从矩阵的后面爬到上面,然后从右往左看就是最终的结果。或者爬到上面,把矩阵沿着axis=2的方向逆序一下子(就相当于朝右了),也是最终的结果。
OK, 如果没懂的话可以再看一个:

这次是后两个轴进行交换,我的理解依然是换坐标轴先,(12)交换,
然后同样是想办法换成原来的观察视角(axis=0朝里,axis=1朝下, axis=2朝右), 即跑到矩阵的后面,然后头顺时针转90度,然后沿着axis=0的方向逆序一下看就是最后的结果。其实说的这么麻烦,只要领悟了这个方式,用空间想象就能够很轻松的想出是怎么变的。
下面这个0和2交换的,就不说了,自己可以标出坐标轴试一下子:

跑到右边,然后沿着axis=0逆序一下看,就得到最终结果。

只要明白了这个原理,其他的情况也都一样了, 其他的情况可以看
三维视图详解keras.permute_dimensions和numpy.transpose转置效果
哈哈,其实还是挺好玩的, 明白了这个视角的角度,也可以试一下axis=0,1,2的三维矩阵加法如何理解Axis?
最后说明一点, 其实这里为了看一下空间矩阵维度的变化细节才记录这个技巧的,其实在在真正的编程上,我们遇到的矩阵行数列数通道数等很多,我们根本没法去具体想象究竟是怎么去算的,并且一般我们实际的矩阵每个方向都有含义,比如[batchsize, time_step, seq_len]这种,转换的时候,我们只要理解是哪个维度的含义和哪个维度转就可以了,一般后两个转[batchsize, seq_len, time_step]这样,这样就基本上能看明白矩阵乘法以及矩阵乘法的含义了。 所以实际情况下不用理解那么细致。
最后就是要注意,上面那种技巧只是换了个角度去看矩阵,如果原来方向上都有特殊含义,可千万不要把特征含义给换了,只换axis帮助你纠正角度就可以。