ubantu16.04下 ROS-kinetic(python3.6) + gtx1650驱动 + tensorflow-gpu +cuda +cudnn+gym-gazebo环境安装
ros_kinetic+gtx1650驱动+python3.6在ros下的应用,博主亲测可用
- Tensorflow-gpu安装
- 1.gpu驱动的安装
- 安装显卡切换软件
- 2. CUDA的安装
- cudnn的安装
- 3.python3.6安装
- 安装python3.6
- 删除python3.5的pip
- 安装python3.6版本的pip
- 查看
- python2与python3.5、3.6共存
- 4.ros-kinetic下使用python 3.6
- 5.gym-gazebo的安装
Tensorflow-gpu安装
本文用来记录自己安装Tensorslow-gpu的过程,没有安装annocoda,annocoda的安装较为简单,可自行百度安装。博主的配置如下:
- ros版本:kinetic
- gpu: GTX1650
目的是在ROS环境下,使用python3以及tensorflow-gpu进行编码,故需要安装以下软件,安装顺序如下:
1.gpu驱动的安装
参考链接:https://blog.csdn.net/weixin_43455581/article/details/98187679
2.cuda以及cudnn的安装
参考链接:https://blog.csdn.net/qq_23996885/article/details/89881877
3.python3.6的安装
4.ros-kinetic下使用python 3.6的方法
5.安装gym-gazebo
1.gpu驱动的安装
本文使用安装源进行安装,简单易行,亲测可用。打开bash,执行:
sudo add-apt-repository ppa:graphics-drivers/ppa
sudo apt-get update
查看可以选择的驱动
ubuntu-drivers devices
找到合适的版本,然后安装
sudo apt-get install nvidia-××××
sudo apt-get install mesa-common-dev
sudo apt-get install freeglut3-dev
安装显卡切换软件
为了便于日后进行下显卡切换,可安装显卡切换软件,如果以后不需要显卡切换,这一步可以跳过。打开bash,执行:
sudo add-apt-repository ppa:nilarimogard/webupd8 #添加PPA更新源
sudo apt-get update #刷新更新源列表
sudo apt-get install prime-indicator #安装双显卡切换指示器
此时,重启电脑可以看到屏幕右上角显示为:

打开关于这台计算机:

在命令行输入:nvidia-smi,出现以下信息,则:
 至此,gpu驱动安装完毕。
至此,gpu驱动安装完毕。
装完驱动之后无法使用快捷键进行亮度调节,安装亮度调节软件可解决此问题:
sudo add-apt-repository ppa:apandada1/brightness-controller
sudo apt-get update
sudo apt-get install brightness-controller-simple
打开软件,brightness-controller,即可进行亮度调节。
2. CUDA的安装
根据上图右上角显示的信息,可知需要 CUDA Version:10.1,前往官网选择合适的版本,
CUDA网址:https://developer.nvidia.com/cuda-toolkit-archive
博主选择的配置如下:
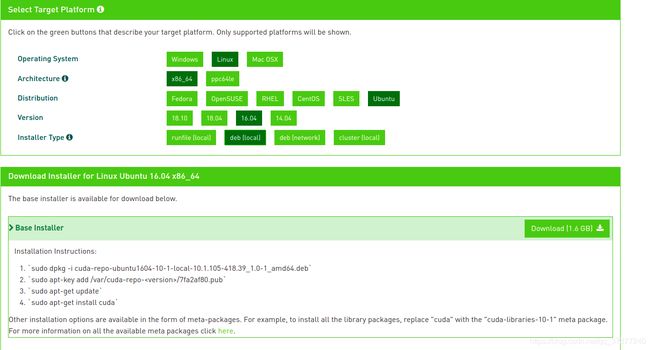
下载完成后,得到文件:

根据官方提示,然后打开bash,执行:
sudo dpkg -i cuda-repo-ubuntu1604-10-1-local-10.1.105-418.39_1.0-1_amd64.deb
sudo apt-key add /var/cuda-repo-/7fa2af80.pub
sudo apt-get update
sudo apt-get install cuda
在终端输入nvcc --version,控制显示如下,则安装成功。至此CUDA安装完毕。

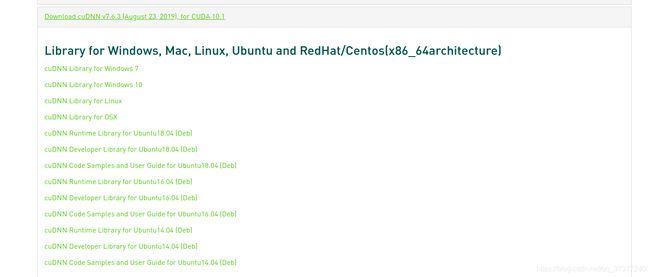
cudnn的安装
前往官网,选择合适的版本:
cudnn官网:https://developer.nvidia.com/rdp/cudnn-archive
选择for linux版本下载:
下载完成之后,解压,在当前解压目录下打开bash,输入:
sudo cp cuda/include/cudnn.h /usr/local/cuda/include/
sudo cp cuda/lib64/libcudnn* /usr/local/cuda/lib64/ -d
sudo chmod a+x /usr/local/cuda/include/cudnn.h
sudo chmod a+x /usr/local/cuda/lib64/libcudnn*
至此,cudnn安装结束。
3.python3.6安装
由于某些包需要在python 3.6的环境下安装,而ubuntu自带3.5和2.7版本,所以需要安装一下python 3.6。
安装python3.6
sudo add-apt-repository ppa:deadsnakes/ppa
sudo apt update
sudo apt install python3.6
删除python3.5的pip
pip -V #查看当前pip版本
apt-get remove python3-pip
apt-get autoremove
安装python3.6版本的pip
apt-get install python3-pip
python3.6 -m pip install --upgrade pip
查看
pip -V
python2与python3.5、3.6共存
参考链接https://chaiyu2002.blog.csdn.net/article/details/82698376
修改软链接
sudo update-alternatives --install /usr/bin/python3 python3 /usr/bin/python3.5 1
sudo update-alternatives --install /usr/bin/python3 python3 /usr/bin/python3.6 2
此时,python3版本为3.6
可以执行以下命令切换:
sudo update-alternatives --config python3
4.ros-kinetic下使用python 3.6
由于ros-kinetic系统仅支持2.7版本,所以系统的整体python运行环境必须处于python2.7下,否则在运行某些组建时会报错,执行如下命令可进行切换:
sudo update-alternatives --config python
选择python 2即可。
在使用python 3编写ros节点时,在文件开头只需添加:
#!/usr/bin/env python3
则可以正常使用
5.gym-gazebo的安装
官方教程:https://github.com/erlerobot/gym-gazebo/blob/master/INSTALL.md#ubuntu-1604
选择合适的系统,按照步骤执行即可。
全文完。