indigo 安装 V-REP和vrep_ros_bridge
首先,感谢Top Liu 和zhangrelay,本文是学习这两位老师文章之后,实践操作,写之,作为日后参考之用。在此,贴出两位老师的文章,供大家参考:
ROS与Matlab系列2:连接vrep仿真器
机器人操作系统ROS(indigo)与三维仿真软件V-Rep(3.2.1)通信接口使用笔记
正文:
vrep_ros_bridge提供了V-Rep和ROS之间的通信接口,可以实现使用ROS消息和服务控制V-REP仿真的功能。
V_REP的安装
1.在官网下载相关版本,此处下载v-rep edu Linux 64 bit版。
2. 在Terminal终端中使用cd进入下载目录。
3.执行解压命令:
$ tar –zxvf V-REP_PRO_EDU_V3_3_2_64_Linux.tar.gz4.简单起见,将解压缩文件复制到根目录 ~/ 下,并命名为vrep_edu.
V-REP_ros_bridge的安装
1.在Github上下载程序包,解压到目录~/catkin_ws/src中,也可以通过git获得:
$ cd ~/catkin_ws/src
$ git clone https://github.com/lagadic/vrep_ros_bridge.git2. 跳过quadrotor_tk_handler,进行编译,否则会无法编译。
$ cd ~/catkin_ws/src/vrep_ros_bridge-master/quadrotor_tk_handler
$ touch CATKIN_IGNORE$ gedit ~/.bashrcexport VREP_ROOT_DIR=~/vrep_edu
export ROS_PACKAGE_PATH=${ROS_PACKAGE_PATH}:~ /catkin_ws/src
source /opt/ros/indigo/setup.bash
source /path_to_catkin_ws/catkin_ws/devel/setup.bash4.进入~ /catkin_ws目录,进行编译:
$ cd ~ /catkin_ws
$ catkin_make
$ catkin_make --pkg vrep_ros_bridge --cmake-args -DCMAKE_BUILD_TYPE=RelWithDebInfo如果成功,可以在catkin_ws/devel/lib/下发现libv_repExtRosBridge.so, libcamera_handler.so, libmanipulator_handler.so, libquadrotor_handler.so, librigid_body_handler.so
5.进入V-REP的安装目录,建立同步链接:
$ cd ~ /vrep_edu
$ ln -s ~/catkin_ws/devel/lib/libv_repExtRosBridge.so$ ln –s compiledRosPlugins/libv_repExtRos.so下面进行测试:
1.在一个终端启动roscore:
$ roscore$ cd ~/vrep_edu/vrep.sh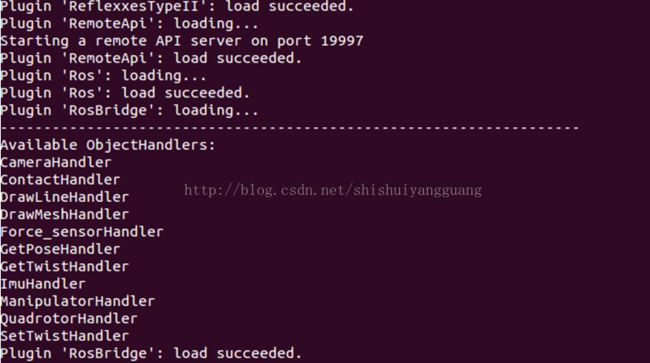

3.下面测试一个场景,在V-REP中打开一个scene,可以看到有一个四旋翼和一台六自由度机械臂。"~/catkin_ws/src/vrep_ros_bridge-master/SceneVrep/Test.ttt",点击开始仿真,在External console会出现如下信息:

4.查看ROS的计算图示,在一个终端输入:
$ rqt_graph
5.打开一个终端,查看rostopic:
$ rostopic list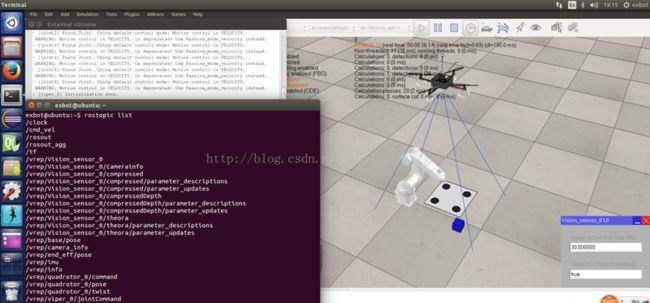
6. 也可以换场景,控制机器人
$ rosrun rqt_publisher rqt_publisher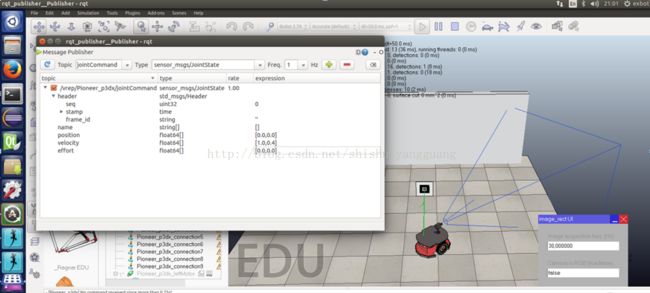
参考资料
http://blog.exbot.net/archives/2619http://blog.csdn.net/zhangrelay/article/details/49401881
http://blog.csdn.net/zixiximm/article/details/53410770
https://github.com/lagadic/vrep_ros_bridge