嵌入式linux下用C实现MQTT数据(JSON编码)发布
嵌入式Linux硬件很多,在网上可以买到很多款,我采用了一款带4G和SDK开发环境的HJ8300硬件,采用MIPS处理,580Mhz的主频,128M内存,作为MQTT的开发已经足够。
HJ8300已经集成了GCC、GDB和LIB等编译调试工具,用SSH登录到设备就可以编译程序和调试程序。
登录后通过ls命令查看根目录 /mmz下面,大部分路径为编译器和库的路径,work路径下面放了ssl和MQTT的demo。
进入MQTTdemo路径,可以看到下面的文件:
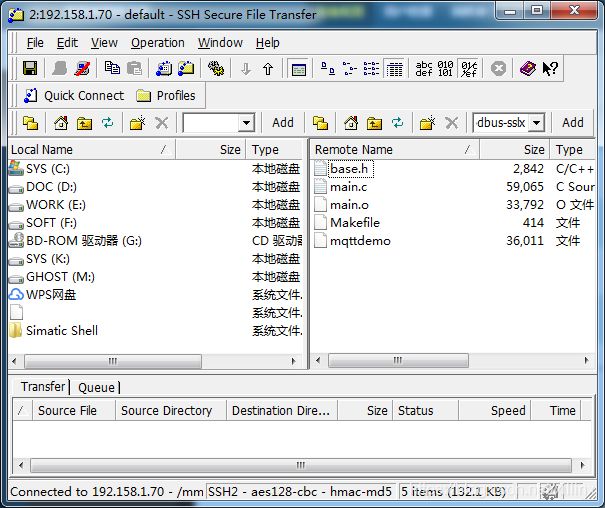
里面主要文件是main.c和base.h,包含linux项目Makefile文件,打开Makefile,
INCLUDES= base.h
CFLAGS = -Wall -O2 -I/mmz/mipsel-mt76xx-linux-gnu/include -L/mmz/mipsel-mt76xx-linux-gnu/lib
CC=gcc
all : mqttdemo
%.o : %.c $(INCLUDES)
$(CC) $(CFLAGS) -c $<
mqttdemo : main.o
$(RM) mqttdemo
$(CC) -o $@ $(CFLAGS) -L. -lpthread -lrt -ljson-c -lmosquitto -lssl -lcrypto -lcares $<
clean:
$(RM) *.o *~ mqttdemo
可以看出,编译器安装的路径在/mmz/mipsel-mt76xx-linux-gnu,源文件是main.c,编译后生成mqttdemo可执行文件
main.c的文件较长,下面介绍主要流程。
int main(int argc, char *argv[])
{ uint08t etha[0x8];
int status;
blue_system(0,"ulimit -c 1024");
blue_system(0,"ifconfig eth0 up");
blue_read_net_interface("eth0",etha);
sprintf(blue_etha_string,"%02X-%02X-%02X-%02X-%02X-%02X",etha[0],etha[1],etha[2],etha[3],etha[4],etha[5]);
memset(&blue_modbus_block,0x0,sizeof(blue_thread_block_t));
memset(&blue_mqtt_block,0x0,sizeof(blue_thread_block_t));
blue_mqtt_init_from_file("./mqttconf.txt");
blue_timer_initilaize();
status=blue_mqtt_thread_start(&blue_mqtt_block);
if( status<0)
{ blue_printf("start MQTT service Failed\r\n");
return -1;
}
sem_init(&system_close_semphore,0,0); /* 关闭信号量 */
blue_sem_wait(&system_close_semphore); /* 等待关闭 */
blue_mqtt_thread_stop(&blue_mqtt_block);
return 0x1;
}
从main函数可以看出,系统先读取HJ8300的MAC地址和MQTT的配置参数,启动了一个mqtt线程来处理MQTT的事物,main程序就等
待关闭信号了。
分析一下mqtt线程
void * blue_mqtt_thread(void * parameter)
{ blue_thread_block_t * block=(blue_thread_block_t*)parameter;
char mqtt_dmain[NAME_TXT_MAX];
char mqtt_topic[NAME_TXT_MAX];
int status;
int mid=0;
sprintf(mqtt_dmain,"%d.%d.%d.%d",mqtt_server_addr[0],mqtt_server_addr[1],mqtt_server_addr[2],mqtt_server_addr[3]);
mosquitto_lib_init();
while(block->runs==1)
{ block->mqtt=mosquitto_new("COM",TRUE,NULL);
if( block->mqtt==NULL)
{ break;
}
mosquitto_connect_callback_set(block->mqtt, blue_mqtt_connect_callback);
mosquitto_disconnect_callback_set(block->mqtt, blue_mqtt_disconnect_callback);
mosquitto_publish_callback_set(block->mqtt, blue_mqtt_publish_callback);
mosquitto_message_callback_set(block->mqtt, blue_mqtt_message_callback);
status=mosquitto_connect(block->mqtt,mqtt_dmain,mqtt_server_port,600);
if( status)
{ mosquitto_destroy(block->mqtt);
block->mqtt=NULL;
blue_printf("blue MQTT connect <%s>-<%d> failed\r\n",mqtt_dmain,mqtt_server_port);
sleep(2);
continue;
}
snprintf(mqtt_topic,NAME_TXT_MAX,"/mqtt-demo/%s/%s/%s/0",mqtt_user_name,mqtt_user_pass,blue_etha_string);
status=mosquitto_subscribe(block->mqtt,&mid,mqtt_topic,0);
if( status!=0)
{ mosquitto_destroy(block->mqtt);
block->mqtt=NULL;
blue_printf("blue MQTT subscribe failed\r\n");
sleep(2);
continue;
}
status=blue_modbus_thread_start(&blue_modbus_block);
if( status<0)
{ mosquitto_destroy(block->mqtt);
block->mqtt=NULL;
blue_printf("blue MQTT start CLX failed\r\n");
sleep(5);
continue;
}
while(block->runs==1)
{ status=mosquitto_loop(block->mqtt,1,10);
if( status==0)
{ ;
}
else
{ blue_printf("blue MQTT %d restart\r\n",status);
break;
}
}
blue_modbus_thread_stop(&blue_modbus_block);
mosquitto_destroy(block->mqtt);
block->mqtt=NULL;
}
if( block->mqtt)
{ mosquitto_destroy(block->mqtt);
}
mosquitto_lib_cleanup();
block->mqtt=NULL;
block->runs=-1;
return NULL;
}
调用mosquitto_lib_init系统函数直接初始化库,通过mosquitto_connect_callback_set设置回调函数,mosquitto_connect调用main函数获取的配置参数连接到MQTT的服务器,mosquitto_subscribe函数发布MQTT主题,到处,MQTT的任务处理完成。
mqtt线程接着调用blue_modbus_thread_start启动了一个MODBUS线程,完成从RS485端口读取数据,把读取的数据通过MQTT发布出去。现在分析一下MODBUS线程:
void * blue_modbus_thread(blue_thread_block_t * block)
{ struct timeval timeout;
fd_set readset;
int status;
status=blue_uart_connect(block);
if( status<0)
{ block->runs=-1;
return NULL;
}
block->ua_status=UART_STAT_IDLE;
while(block->runs==0x1)
{ timeout.tv_sec =1;
timeout.tv_usec=0;
FD_ZERO(&readset);
FD_SET(block->sock,&readset);
status=select(block->sock+1,&readset,NULL,NULL,&timeout);
if( status<0)
{ blue_printf("Modbus select failed\r\n");
continue;
}
if( FD_ISSET(block->sock,&readset))
{ status=blue_modbus_recv_uart_data(block);
if( status<0x0)
{ blue_printf("Modbus recv failed\r\n");
}
else
{ blue_printf("Modbus recv OK\r\n");
}
}
blue_modbus_thread_polling(block);
}
blue_uart_close(block);
block->runs=-1;
return NULL;
}
函数blue_uart_connect连接到RS485串口,函数blue_modbus_recv_uart_data从串口接收数据并发布数据,现在分析这个函数:
int blue_modbus_recv_uart_data(blue_thread_block_t * block)
{ modbus_command_t * command;
char buffer[NAME_TXT_MAX];
uint16t crcchk;
uint16t crcorg;
int status;
int modlen;
command=block->curcmd;
if( command==NULL)
{ recv(block->sock,buffer,BUFF_LEN_MAX,MSG_NOSIGNAL);
blue_printf("Modbus command null\r\n");
return -1;
}
if( command->rsp_len>=BUFF_LEN_MAX)
{ command->rsp_len=0;
}
status=recv(block->sock,command->rsp+command->rsp_len,BUFF_LEN_MAX-command->rsp_len,MSG_NOSIGNAL);
if( status<=0x0)
{ blue_printf("Modbus command recv null\r\n");
return -1;
}
command->rsp_len+=status;
if( command->rsp_len<=3)
{ blue_printf("Modbus command recv len=%d wait\r\n",command->rsp_len);
return 0x1;
}
modlen =command->rsp[2];
modlen+=5; /* add the address/command/length/+...+/CRC = 5 bytes */
if( command->rsp_len
return 0x1;
}
if( command->rsp[1]==(command->cmd[1]|0x80))
{ blue_printf("Modbus command recv response <%d> failed\r\n",command->rsp[1]);
return 0x1;
}
crcchk =blue_crc16(command->rsp,modlen-0x2);
crcorg =command->rsp[modlen-0x2];
crcorg<<=0x8;
crcorg +=command->rsp[modlen-0x1];
if( crcorg!=crcchk)
{ blue_printf("Modbus command recv CRC <%04X--%04X> failed\r\n",crcchk,crcorg);
return 0x1;
}
blue_mqtt_publish_modbus_data(block,command);
block->ua_status=UART_STAT_IDLE;
block->curcmd=NULL;
blue_printf("Modbus data publish OK\r\n");
return 0x1;
}
这个函数就是从串口的socket里面读取数据,对MODBUS数据进行校验(CRC16),如果数据正确,调用
blue_mqtt_publish_modbus_data这个函数发布MQTT数据。
下面分析这个函数:
int blue_mqtt_publish_modbus_data(blue_thread_block_t * modbus, modbus_command_t * command)
{ blue_thread_block_t * mqtt=&blue_mqtt_block;
char topic[NAME_TXT_MAX];
char stmr[NAME_TXT_MAX];
char msg[MSG_TXT_MAX];
time_t ptm=time(NULL);
struct tm rtc;
json_object * head=NULL;
json_object * body=NULL;
json_object * json=NULL;
json_object * jarr=NULL;
int status;
int len=0;
int i;
if( localtime_r(&ptm,&rtc)==NULL)
{ return -1;
}
else
{ snprintf(stmr,NAME_TXT_MAX,"%4d-%02d-%02dT%d:%02d:%02d.000+0800",rtc.tm_year+1900,rtc.tm_mon+0x1,rtc.tm_mday,rtc.tm_hour,rtc.tm_min,rtc.tm_sec);/*yyyy-MM-dd'T'HH:mm:ss.SSS[+-]HH:ss*/
}
status=snprintf(topic,NAME_TXT_MAX,"/modbus/%s/%s/%d",(char*)mqtt_user_name,blue_etha_string,command->cmd[3]);
if( status<0)
{ return -1;
}
modbus->sequnce++;
head=json_object_new_object();
json_object_object_add(head,"Type", json_object_new_int(5)); /* message type */
json_object_object_add(head,"Sequnce", json_object_new_int(modbus->sequnce)); /* message sequnce */
body=json_object_new_object();
json_object_object_add(body,"Reference", json_object_new_int(5));
json_object_object_add(body,"SamplingTime", json_object_new_string(stmr));
json_object_object_add(body,"Description", json_object_new_string("Modbus data"));
len=(int)command->rsp[2];
json_object_object_add(body,"Bytes", json_object_new_int(len));
jarr=json_object_new_array();
for(i=0;i
}
json_object_object_add(body,"Data",jarr);
json=json_object_new_object();
json_object_object_add(json,"h",head);
json_object_object_add(json,"b",body);
len=snprintf(msg,MSG_TXT_MAX,"J%s\n",json_object_to_json_string_ext(json,JSON_C_TO_STRING_PRETTY));
json_object_put(head);
json_object_put(body);
json_object_put(json);
blue_printf("MQTT toptic:%s\r\n%s\r\n",topic,msg);
if( mqtt->mqtt==NULL)
{ blue_printf("MQTT publish null failed\r\n");
return -1;
}
status=mosquitto_publish(mqtt->mqtt,NULL,topic,strlen(msg),msg,0,0);
if( status!=MOSQ_ERR_SUCCESS)
{ blue_printf("MQTT publish failed\r\n");
return -1;
}
else
{ blue_printf("MQTT publish OK\r\n");
return 0x1;
}
}
从函数可以看出,采用JSON对MODBUS数据编码,调用mosquitto_publish发布数据,流程还是很清晰的。
通过HJ8300编译这个程序后,可以直接运行和调试。
通过DEMO程序这样可以节约大量的时间处理流程,把重点放到数据处理。