8、STM32定时器原理与使用(内附代码)
STM32定时器原理与使用1.定义
设置等待时间,到达等待时间之后执行指定的硬件操作。
定时器最基本的功能就是定时,比如说定时发送串口数据,定时采集AD数据,也可以产生PWM方波等,定时器产生PWM控制电机状态是工业控制的普通。
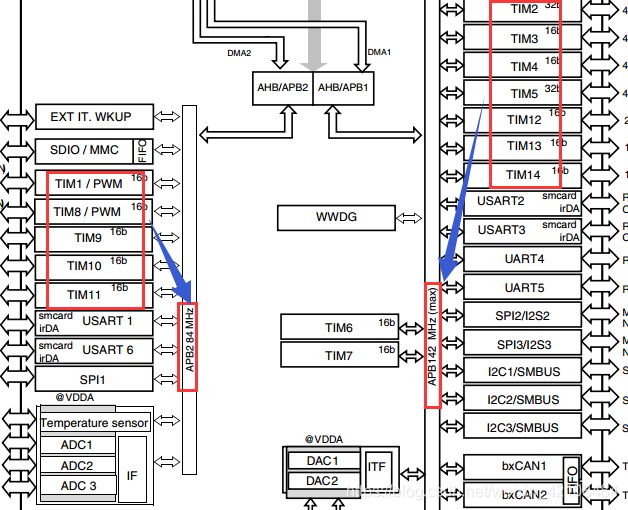
2、STM32F4xx系列的芯片:2个高级控制定时器(TIM1和TIM8)、10个通用定时器(10TIM2-TIM5,TIM9-TIM14)、2个基本定时器(TIM6和TIM7)、2个看门狗定时器
具体可参考中文参考手册了解其特性及原理

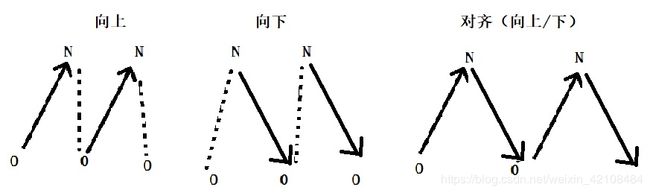
3、定时器计数模式:
通用定时器可以向上计数、向下计数、向上向下双向计数模式。
①向上计数模式:计数器从0计数到自动加载值(TIMx_ARR),然后重新从0开始计数并且产生一个计数器溢出事件。
②向下计数模式:计数器从自动装入的值(TIMx_ARR)开始向下计数到0,然后从自动装入的值重新开始,并产生一个计数器向下溢出事件。
③中央对齐模式(向上/向下计数):计数器从0开始计数到自动装入的值-1,产生一个计数器溢出事件,然后向下计数到1并且产生一个计数器溢出事件;然后再从0开始重新计数。
如图:
4、通用定时器工作原理:
● 计数器寄存器 (TIMx_CNT)
● 预分频器寄存器 (TIMx_PSC)
● 自动重载寄存器 (TIMx_ARR)
假如是向上增长模式,计数器(CNT)从0加到自动重载值(ARR),预分频器(PSC)减一次。
时间计算方式:
假设频率为:42M*2 == 84M == 84000000 == 1s //42根据定时器时钟数可知 并且一般都是*2
定时器定时1s产生中断:
ARR = 84000; // 1ms
PSC = 1000; // 1000*1ms == 1s
如图:可知基本定时器的时钟是42M,那么对应*2就是84M=84000000=1S(ARR*PSC)
高级的既是84*2=96M=96000000=1S
5、定时器中断实现步骤
//5.1、能定时器时钟。
RCC_APB1PeriphClockCmd();
//5.2、初始化定时器,配置ARR,PSC。(申明结构体)
TIM_TimeBaseInit();
typedef struct
{
uint16_t TIM_Prescaler;
uint16_t TIM_CounterMode;
uint16_t TIM_Period;
uint16_t TIM_ClockDivision;
uint8_t TIM_RepetitionCounter;
} TIM_TimeBaseInitTypeDef;
//5.3、启定时器中断,配置NVIC(申明结构体)
NVIC_Init();
进行NVIC中断配置
NVIC_InitStructure.NVIC_IRQChannel=TIM3_IRQn; //定时器 3 中断
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=0x01; //抢占优先级 1
NVIC_InitStructure.NVIC_IRQChannelSubPriority=0x03; //响应优先级 3
NVIC_InitStructure.NVIC_IRQChannelCmd=ENABLE;
NVIC_Init(&NVIC_InitStructure);// ④初始化 NVIC
TIM_Cmd(TIM3,ENABLE); //⑤使能定时器 3
//5.4、设置 TIM3_DIER 允许更新中断
TIM_ITConfig();
//5.5、使能定时器。
TIM_Cmd();
//5.6、编写中断服务函数。
TIMx_IRQHandler();
//定时器 3 中断服务函数
void TIM3_IRQHandler(void)
{
if(TIM_GetITStatus(TIM3,TIM_IT_Update)==SET) //溢出中断
{
/*处理的程序段*/
}
TIM_ClearITPendingBit(TIM3,TIM_IT_Update); //清除中断标志位
}
TIM3_Int_Init(5000-1,8400-1); //定时器时钟84M,分频系数8400,所以84M/8400=10Khz的计数频率,计数5000次为500ms
void TIM3_Int_Init(u16 arr,u16 psc)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3,ENABLE); ///使能TIM3时钟
TIM_TimeBaseInitStructure.TIM_Period = arr; //自动重装载值
TIM_TimeBaseInitStructure.TIM_Prescaler=psc; //定时器分频
TIM_TimeBaseInitStructure.TIM_CounterMode=TIM_CounterMode_Up; //向上计数模式
TIM_TimeBaseInitStructure.TIM_ClockDivision=TIM_CKD_DIV1;
TIM_TimeBaseInit(TIM3,&TIM_TimeBaseInitStructure);//初始化TIM3
TIM_ITConfig(TIM3,TIM_IT_Update,ENABLE); //允许定时器3更新中断
TIM_Cmd(TIM3,ENABLE); //使能定时器3
NVIC_InitStructure.NVIC_IRQChannel=TIM3_IRQn; //定时器3中断
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=0x01; //抢占优先级1
NVIC_InitStructure.NVIC_IRQChannelSubPriority=0x03; //子优先级3
NVIC_InitStructure.NVIC_IRQChannelCmd=ENABLE;
NVIC_Init(&NVIC_InitStructure);
}
//定时器3中断服务函数
void TIM3_IRQHandler(void)
{
if(TIM_GetITStatus(TIM3,TIM_IT_Update)==SET) //溢出中断
{
LED1=!LED1;//DS1翻转
}
TIM_ClearITPendingBit(TIM3,TIM_IT_Update); //清除中断标志位
}--------------------------------------------------------------------------END--------------------------------------------------------------------------------