梯度下降、牛顿法凸优化、L1、L2正则化、softmax、Batchnorm、droupout、Targeted Dropout详解
一、梯度下降
问题提出:虽然给定一个假设函数,我们能够根据cost function知道这个假设函数拟合的好不好,但是毕竟函数有这么多,总不可能一个一个试吧?因此我们引出了梯度下降:能够找出cost function函数的最小值;
梯度下降背后的思想是:开始时我们随机选择一个参数的组合(θ0,θ1,...,θn),计算代价函数,然后我们寻找下一个能让代价函数值下降最多的参数组合。我们持续这么做直到到到一个局部最小值(local minimum)。直白的话说,梯度下降原理:将函数比作一座山,我们站在某个山坡上,往四周看,从哪个方向向下走一小步,能够下降的最快。如图所示。

下山问题
假设我们位于黄山的某个山腰处,山势连绵不绝,不知道怎么下山。于是决定走一步算一步,也就是每次沿着当前位置最陡峭最易下山的方向前进一小步,然后继续沿下一个位置最陡方向前进一小步。这样一步一步走下去,一直走到觉得我们已经到了山脚。这里的下山最陡的方向就是梯度的负方向。

首先理解什么是梯度?通俗来说,梯度就是表示某一函数在该点处的方向导数沿着该方向取得最大值,即函数在当前位置的导数。

上式中,θ是自变量,f(θ)是关于θ的函数,θ表示梯度。
如果函数f(θ)是凸函数,那么就可以使用梯度下降算法进行优化。梯度下降算法的公式我们已经很熟悉了:

其中,θo是自变量参数,即下山位置坐标,η是学习因子,即下山每次前进的一小步(步进长度),θ是更新后的θo,即下山移动一小步之后的位置。
一阶泰勒展开式
这里需要一点数学基础,对泰勒展开式有些了解。简单地来说,一阶泰勒展开式利用的就是函数的局部线性近似这个概念。我们以一阶泰勒展开式为例:

不懂上面的公式?没有关系。我用下面这张图来解释。
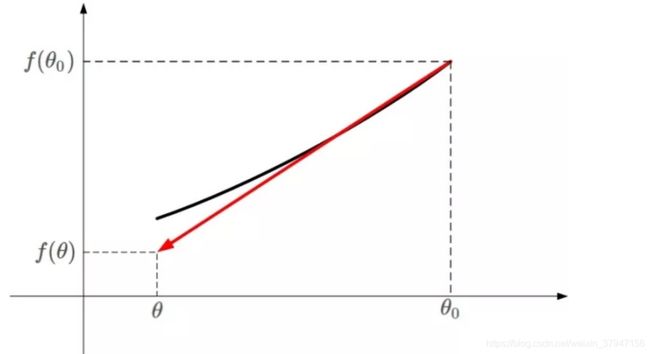
凸函数f(θ)的某一小段[θo,θ]由上图黑色曲线表示,可以利用线性近似的思想求出f(θ)的值,如上图红色直线。该直线的斜率等于f(θ)在θo处的导数。则根据直线方程,很容易得到f(θ)的近似表达式为:

这就是一阶泰勒展开式的推导过程,主要利用的数学思想就是曲线函数的线性拟合近似。
梯度下降数学原理
知道了一阶泰勒展开式之后,接下来就是重点了!我们来看一下梯度下降算法是如何推导的。
先写出一阶泰勒展开式的表达式:

其中,θ−θo是微小矢量,它的大小就是我们之前讲的步进长度η,类比于下山过程中每次前进的一小步,η为标量,而θ−θo的单位向量用v表示。则θ−θo可表示为:

特别需要注意的是,θ−θo不能太大,因为太大的话,线性近似就不够准确,一阶泰勒近似也不成立了。替换之后,f(θ)的表达式为:

重点来了,局部下降的目的是希望每次θ更新,都能让函数值f(θ)变小。也就是说,上式中,我们希望f(θ)

因为η为标量,且一般设定为正值,所以可以忽略,不等式变成了:

上面这个不等式非常重要!v和∇f(θo)都是向量,∇f(θo)是当前位置的梯度方向,v表示下一步前进的单位向量,是需要我们求解的,有了它,就能根据vθ−θo=ηv确定θ值了。
想要两个向量的乘积小于零,我们先来看一下两个向量乘积包含哪几种情况:

A和B均为向量,α为两个向量之间的夹角。A和B的乘积为:

||A||和||B||均为标量,在||A||和||B||确定的情况下,只要cos(α)=−1,即A和B完全反向,就能让A和B的向量乘积最小(负最大值)。
顾名思义,当v与∇f(θo)互为反向,即v为当前梯度方向的负方向的时候,能让v⋅∇f(θo)最大程度地小,也就保证了v的方向是局部下降最快的方向。
知道v是∇f(θo)的反方向后,可直接得到:

之所以要除以∇f(θo)的模||∇f(θo)||,是因为v是单位向量。
求出最优解v之后,带入到θ−θo=ηv中,得:

一般地,因为||∇f(θo)||是标量,可以并入到步进因子η中,即简化为:
这样,我们就推导得到了梯度下降算法中θ的更新表达式。
二、牛顿法凸优化
1、牛顿法求解方程的根
有时候,在方程比较复杂的情况下,使用一般方法求解它的根并不容易。牛顿法通过迭代的方式和不断逼近的思想,可以近似求得方程较为准确的根。
牛顿法求根的核心思想是泰勒一阶展开。例如对于方程 f(x) = 0,我们在任意一点 x0 处,进行一阶泰勒展开:

令 f(x) = 0,带入上式,即可得到:

注意,这里使用了近似,得到的 x 并不是方程的根,只是近似解。但是,x 比 x0 更接近于方程的根。效果如下图所示:

然后,利用迭代方法求解,以 x 为 x0,求解下一个距离方程的根更近的位置。迭代公式可以写成:

经过一定次数的有效迭代后,一般都能保证在方程的根处收敛。下面给出整个迭代收敛过程的动态演示。
2、牛顿法凸优化
上一部分介绍牛顿法如何求解方程的根,这一特性可以应用在凸函数的优化问题上。
机器学习、深度学习中,损失函数的优化问题一般是基于一阶导数梯度下降的。现在,从另一个角度来看,想要让损失函数最小化,这其实是一个最值问题,对应函数的一阶导数 f'(x) = 0。也就是说,如果我们找到了能让 f'(x) = 0 的点 x,损失函数取得最小值,也就实现了模型优化目标。
现在的目标是计算 f'(x) = 0 对应的 x,即 f'(x) = 0 的根。转化为求根问题,就可以利用上一节的牛顿法了。
与上一节有所不同,首先,对 f(x) 在 x0 处进行二阶泰勒展开:

上式成立的条件是 f(x) 近似等于 f(x0)。令 f(x) = f(x0),并对 (x - x0) 求导,可得:
同样,虽然 x 并不是最优解点,但是 x 比 x0 更接近 f'(x) = 0 的根。这样,就能得到最优化的迭代公式:
通过迭代公式,就能不断地找到 f'(x) = 0 的近似根,从而也就实现了损失函数最小化的优化目标。
3、梯度下降 VS 牛顿法
现在,分别写出梯度下降和牛顿法的更新公式:

梯度下降算法是将函数在 xn 位置进行一次函数近似,也就是一条直线。计算梯度,从而决定下一步优化的方向是梯度的反方向。而牛顿法是将函数在 xn 位置进行二阶函数近似,也就是二次曲线。计算梯度和二阶导数,从而决定下一步的优化方向。一阶优化和二阶优化的示意图如下所示:
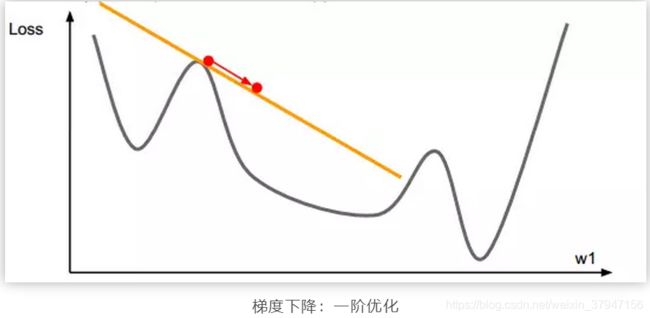

以上所说的是梯度下降和牛顿法的优化方式差异。那么谁的优化效果更好呢?
于牛顿法和梯度下降法的效率对比:
从本质上去看,牛顿法是二阶收敛,梯度下降是一阶收敛,所以牛顿法就更快。如果更通俗地说的话,比如你想找一条最短的路径走到一个盆地的最底部,梯度下降法每次只从你当前所处位置选一个坡度最大的方向走一步,牛顿法在选择方向时,不仅会考虑坡度是否够大,还会考虑你走了一步之后,坡度是否会变得更大。所以,可以说牛顿法比梯度下降法看得更远一点,能更快地走到最底部。(牛顿法目光更加长远,所以少走弯路;相对而言,梯度下降法只考虑了局部的最优,没有全局思想。)
根据wiki上的解释,从几何上说,牛顿法就是用一个二次曲面去拟合你当前所处位置的局部曲面,而梯度下降法是用一个平面去拟合当前的局部曲面,通常情况下,二次曲面的拟合会比平面更好,所以牛顿法选择的下降路径会更符合真实的最优下降路径。
注:红色的牛顿法的迭代路径,绿色的是梯度下降法的迭代路径。
牛顿法的优缺点总结:
优点:二阶收敛,收敛速度快;
缺点:牛顿法是一种迭代算法,每一步都需要求解目标函数的Hessian矩阵的逆矩阵,计算比较复杂。

然后,我们再来看一下牛顿法的缺点。我们注意到牛顿法迭代公式中除了需要求解一阶导数之外,还要计算二阶导数。从矩阵的角度来说,一阶导数和二阶导数分别对应雅可比矩阵(Jacobian matrix)和海森矩阵(Hessian matrix)
牛顿法不仅需要计算 Hessian 矩阵,而且需要计算 Hessian 矩阵的逆。当数据量比较少的时候,运算速度不会受到大的影响。但是,当数据量很大,特别在深度神经网络中,计算 Hessian 矩阵和它的逆矩阵是非常耗时的。从整体效果来看,牛顿法优化速度没有梯度下降算法那么快。所以,目前神经网络损失函数的优化策略大多都是基于梯度下降。
值得一提的是,针对牛顿法的缺点,目前已经有一些改进算法。这类改进算法统称拟牛顿算法。比较有代表性的是 BFGS 和 L-BFGS。 可以参考:http://www.cnblogs.com/liuwu265/p/4714396.html
三、 L1 和 L2 正则化
1、L2 正则化直观解释
L2 正则化公式非常简单,直接在原来的损失函数基础上加上权重参数的平方和:

其中,Ein 是未包含正则化项的训练样本误差,λ 是正则化参数,可调。但是正则化项是如何推导的?接下来,我将详细介绍其中的物理意义。
我们知道,正则化的目的是限制参数过多或者过大,避免模型更加复杂。例如,使用多项式模型,如果使用 10 阶多项式,模型可能过于复杂,容易发生过拟合。所以,为了防止过拟合,我们可以将其高阶部分的权重 w 限制为 0,这样,就相当于从高阶的形式转换为低阶。
为了达到这一目的,最直观的方法就是限制 w 的个数,但是这类条件属于 NP-hard 问题,求解非常困难。所以,一般的做法是寻找更宽松的限定条件:
上式是对 w 的平方和做数值上界限定,即所有w 的平方和不超过参数 C。这时候,我们的目标就转换为:最小化训练样本误差 Ein,但是要遵循 w 平方和小于 C 的条件。
下面,我用一张图来说明如何在限定条件下,对 Ein 进行最小化的优化。

如上图所示,蓝色椭是最小化 Ein 区域,红色圆圈是 w 的限定条件区域。在没有限定条件的情况下,一般使用梯度下降算法,在蓝色椭圆区域内会一直沿着 w 梯度的反方向前进,直到找到全局最优值 wlin。例如空间中有一点 w(图中紫色点),此时 w 会沿着 -∇Ein 的方向移动,如图中蓝色箭头所示。但是,由于存在限定条件,w 不能离开红色圆形区域,最多只能位于圆上边缘位置,沿着切线方向。w 的方向如图中红色箭头所示。
那么问题来了,存在限定条件,w 最终会在什么位置取得最优解呢?也就是说在满足限定条件的基础上,尽量让 Ein 最小。
我们来看,w 是沿着圆的切线方向运动,如上图绿色箭头所示。运动方向与 w 的方向(红色箭头方向)垂直。运动过程中,根据向量知识,只要 -∇Ein 与运行方向有夹角,不垂直,则表明 -∇Ein 仍会在 w 切线方向上产生分量,那么 w 就会继续运动,寻找下一步最优解。只有当 -∇Ein 与 w 的切线方向垂直时,-∇Ein在 w 的切线方向才没有分量,这时候 w 才会停止更新,到达最接近 wlin 的位置,且同时满足限定条件。

-∇Ein 与 w 的切线方向垂直,即 -∇Ein 与 w 的方向平行。如上图所示,蓝色箭头和红色箭头互相平行。这样,根据平行关系得到:

移项,得:

这样,我们就把优化目标和限定条件整合在一个式子中了。也就是说只要在优化 Ein 的过程中满足上式,就能实现正则化目标。
接下来,重点来了!根据最优化算法的思想:梯度为 0 的时候,函数取得最优值。已知 ∇Ein 是 Ein 的梯度,观察上式,λw 是否也能看成是某个表达式的梯度呢?
当然可以!λw 可以看成是 1/2λw*w 的梯度:
这样,我们根据平行关系求得的公式,构造一个新的损失函数:

之所以这样定义,是因为对 Eaug 求导,正好得到上面所求的平行关系式。上式中等式右边第二项就是 L2 正则化项。
这样, 我们从图像化的角度,分析了 L2 正则化的物理意义,解释了带 L2 正则化项的损失函数是如何推导而来的。
2、L1 正则化直观解释
L1 正则化公式也很简单,直接在原来的损失函数基础上加上权重参数的绝对值:

我仍然用一张图来说明如何在 L1 正则化下,对 Ein 进行最小化的优化。

Ein 优化算法不变,L1 正则化限定了 w 的有效区域是一个正方形,且满足 |w| < C。空间中的点 w 沿着 -∇Ein 的方向移动。但是,w 不能离开红色正方形区域,最多只能位于正方形边缘位置。其推导过程与 L2 类似,此处不再赘述。
3、L1 与 L2 解的稀疏性
介绍完 L1 和 L2 正则化的物理解释和数学推导之后,我们再来看看它们解的分布性。

以二维情况讨论,上图左边是 L2 正则化,右边是 L1 正则化。从另一个方面来看,满足正则化条件,实际上是求解蓝色区域与黄色区域的交点,即同时满足限定条件和 Ein 最小化。对于 L2 来说,限定区域是圆,这样,得到的解 w1 或 w2 为 0 的概率很小,很大概率是非零的。
对于 L1 来说,限定区域是正方形,方形与蓝色区域相交的交点是顶点的概率很大,这从视觉和常识上来看是很容易理解的。也就是说,方形的凸点会更接近 Ein 最优解对应的 wlin 位置,而凸点处必有 w1 或 w2 为 0。这样,得到的解 w1 或 w2 为零的概率就很大了。所以,L1 正则化的解具有稀疏性。
扩展到高维,同样的道理,L2 的限定区域是平滑的,与中心点等距;而 L1 的限定区域是包含凸点的,尖锐的。这些凸点更接近 Ein 的最优解位置,而在这些凸点上,很多 wj 为 0。
关于 L1 更容易得到稀疏解的原因,有一个很棒的解释,请见下面的链接:
https://www.zhihu.com/question/37096933/answer/70507353
4、正则化参数 λ
正则化是结构风险最小化的一种策略实现,能够有效降低过拟合。损失函数实际上包含了两个方面:一个是训练样本误差。一个是正则化项。其中,参数 λ 起到了权衡的作用。

以 L2 为例,若 λ 很小,对应上文中的 C 值就很大。这时候,圆形区域很大,能够让 w 更接近 Ein 最优解的位置。若 λ 近似为 0,相当于圆形区域覆盖了最优解位置,这时候,正则化失效,容易造成过拟合。相反,若 λ 很大,对应上文中的 C 值就很小。这时候,圆形区域很小,w 离 Ein 最优解的位置较远。w 被限制在一个很小的区域内变化,w 普遍较小且接近 0,起到了正则化的效果。但是,λ 过大容易造成欠拟合。欠拟合和过拟合是两种对立的状态。
四、softmax
1、什么是Softmax?
Softmax 在机器学习和深度学习中有着非常广泛的应用。尤其在处理多分类(C > 2)问题,分类器最后的输出单元需要Softmax 函数进行数值处理。关于Softmax 函数的定义如下所示:

其中,Vi 是分类器前级输出单元的输出。i 表示类别索引,总的类别个数为 C。Si 表示的是当前元素的指数与所有元素指数和的比值。Softmax 将多分类的输出数值转化为相对概率,更容易理解和比较。我们来看下面这个例子。
一个多分类问题,C = 4。线性分类器模型最后输出层包含了四个输出值,分别是:

经过Softmax处理后,数值转化为相对概率:

很明显,Softmax 的输出表征了不同类别之间的相对概率。我们可以清晰地看出,S1 = 0.8390,对应的概率最大,则更清晰地可以判断预测为第1类的可能性更大。Softmax 将连续数值转化成相对概率,更有利于我们理解。
实际应用中,使用 Softmax 需要注意数值溢出的问题。因为有指数运算,如果 V 数值很大,经过指数运算后的数值往往可能有溢出的可能。所以,需要对 V 进行一些数值处理:即 V 中的每个元素减去 V 中的最大值。

2、Softmax 损失函数
我们知道,线性分类器的输出是输入 x 与权重系数的矩阵相乘:s = Wx。对于多分类问题,使用 Softmax 对线性输出进行处理。这一小节我们来探讨下 Softmax 的损失函数。

其中,Syi是正确类别对应的线性得分函数,Si 是正确类别对应的 Softmax输出。
由于 log 运算符不会影响函数的单调性,我们对 Si 进行 log 操作:

我们希望 Si 越大越好,即正确类别对应的相对概率越大越好,那么就可以对 Si 前面加个负号,来表示损失函数:

对上式进一步处理,把指数约去:

这样,Softmax 的损失函数就转换成了简单的形式。
举个简单的例子,上一小节中得到的线性输出为:

假设 i = 1 为真实样本,计算其损失函数为:

若令 i = 0 为真实样本,计算其损失函数为:

3、Softmax 反向梯度
推导了 Softmax 的损失函数之后,接下来继续对权重参数进行反向求导。
Softmax 线性分类器中,线性输出为:

其中,下标 i 表示第 i 个样本。
求导过程的程序设计直接使用矩阵运算。
使用矩阵运算,对权重 W 求导函数定义如下:
def softmax_loss_vectorized(W, X, y, reg):
"""
Softmax loss function, vectorized version.
Inputs and outputs are the same as softmax_loss_naive.
"""
# Initialize the loss and gradient to zero.
loss = 0.0
dW = np.zeros_like(W)
num_train = X.shape[0]
num_classes = W.shape[1]
scores = X.dot(W)
scores_shift = scores - np.max(scores, axis = 1).reshape(-1,1)
softmax_output = np.exp(scores_shift) / np.sum(np.exp(scores_shift), axis=1).reshape(-1,1)
loss = -np.sum(np.log(softmax_output[range(num_train), list(y)]))
loss /= num_train
loss += 0.5 * reg * np.sum(W * W)
dS = softmax_output.copy()
dS[range(num_train), list(y)] += -1
dW = (X.T).dot(dS)
dW = dW / num_train + reg * W
return loss, dW
4、Softmax 与 SVM
Softmax线性分类器的损失函数计算相对概率,又称交叉熵损失「Cross Entropy Loss」。线性 SVM 分类器和 Softmax 线性分类器的主要区别在于损失函数不同。SVM 使用 hinge loss,更关注分类正确样本和错误样本之间的距离「Δ = 1」,只要距离大于 Δ,就不在乎到底距离相差多少,忽略细节。而 Softmax 中每个类别的得分函数都会影响其损失函数的大小。举个例子来说明,类别个数 C = 3,两个样本的得分函数分别为[10, -10, -10],[10, 9, 9],真实标签为第0类。对于 SVM 来说,这两个 Li 都为0;但对于Softmax来说,这两个 Li 分别为0.00和0.55,差别很大。
五、Batchnorm
1、Batchnorm 原理解读
为了减小Internal Covariate Shift,对神经网络的每一层做归一化不就可以了,假设将每一层输出后的数据都归一化到0均值,1方差,满足正太分布,但是,此时有一个问题,每一层的数据分布都是标准正太分布,导致其完全学习不到输入数据的特征,因为,费劲心思学习到的特征分布被归一化了,因此,直接对每一层做归一化显然是不合理的。
但是如果稍作修改,加入可训练的参数做归一化,那就是BatchNorm实现的了,接下来结合下图的伪代码做详细的分析:

之所以称之为batchnorm是因为所norm的数据是一个batch的,假设输入数据是β=x_(1...m)共m个数据,输出是y_i=BN(x),batchnorm的步骤如下:
-
先求出此次批量数据x的均值
-
求出此次batch的方差

-
接下来就是对x做归一化,得到x_i^-
-
最重要的一步,引入缩放和平移变量γ和β,计算归一化后的值

接下来详细介绍一下这额外的两个参数,之前也说过如果直接做归一化不做其他处理,神经网络是学不到任何东西的,但是加入这两个参数后,事情就不一样了,先考虑特殊情况下,如果γ和β分别等于此batch的方差和均值,那么y_i不就还原到归一化前的x了吗,也即是缩放平移到了归一化前的分布,相当于batchnorm没有起作用,γ和β分别称之为 平移参数和缩放参数 。这样就保证了每一次数据经过归一化后还保留的有学习来的特征,同时又能完成归一化这个操作,加速训练。
先用一个简单的代码举个小栗子:
def Batchnorm_simple_for_train(x, gamma,beta, bn_param):"""
param:x : 输入数据,设shape(B,L)
param:gama : 缩放因子 γ
param:beta : 平移因子 β
param:bn_param : batchnorm所需要的一些参数
eps : 接近0的数,防止分母出现0
momentum : 动量参数,一般为0.9,0.99, 0.999
running_mean :滑动平均的方式计算新的均值,训练时计算,为测试数据做准备
running_var : 滑动平均的方式计算新的方差,训练时计算,为测试数据做准备
"""
running_mean = bn_param['running_mean'] #shape = [B]
running_var = bn_param['running_var'] #shape = [B]
results = 0. # 建立一个新的变量
x_mean=x.mean(axis=0) # 计算x的均值
x_var=x.var(axis=0) # 计算方差
x_normalized=(x-x_mean)/np.sqrt(x_var+eps) # 归一化
results = gamma * x_normalized + beta # 缩放平移
running_mean = momentum * running_mean + (1 - momentum) * x_mean
running_var = momentum * running_var + (1 - momentum) * x_var #记录新的值
bn_param['running_mean'] = running_mean
bn_param['running_var'] = running_var return results , bn_param看完这个代码是不是对batchnorm有了一个清晰的理解,首先计算均值和方差,然后归一化,然后缩放和平移,完事!但是这是在训练中完成的任务,每次训练给一个批量,然后计算批量的均值方差,但是在测试的时候可不是这样,测试的时候每次只输入一张图片,这怎么计算批量的均值和方差,于是,就有了代码中下面两行,在训练的时候实现计算好mean var测试的时候直接拿来用就可以了,不用计算均值和方差。
running_mean = momentum * running_mean + (1- momentum) * x_mean
running_var = momentum * running_var + (1 -momentum) * x_var所以,测试的时候是这样的:
def Batchnorm_simple_for_test(x, gamma,beta, bn_param):"""
param:x : 输入数据,设shape(B,L)
param:gama : 缩放因子 γ
param:beta : 平移因子 β
param:bn_param : batchnorm所需要的一些参数
eps : 接近0的数,防止分母出现0
momentum : 动量参数,一般为0.9,0.99, 0.999
running_mean :滑动平均的方式计算新的均值,训练时计算,为测试数据做准备
running_var : 滑动平均的方式计算新的方差,训练时计算,为测试数据做准备
"""
running_mean = bn_param['running_mean'] #shape = [B]
running_var = bn_param['running_var'] #shape = [B]
results = 0. # 建立一个新的变量
x_normalized=(x-running_mean )/np.sqrt(running_var +eps) # 归一化
results = gamma * x_normalized + beta # 缩放平移
return results , bn_param你是否理解了呢?如果还没有理解的话,欢迎再多看几遍。
2、Batchnorm源码解读
本节主要讲解一段tensorflow中Batchnorm的可以使用的代码,如下:
代码来自知乎,这里加入注释帮助阅读。
def batch_norm_layer(x, train_phase,scope_bn):
with tf.variable_scope(scope_bn):
# 新建两个变量,平移、缩放因子
beta = tf.Variable(tf.constant(0.0, shape=[x.shape[-1]]), name='beta',trainable=True)
gamma = tf.Variable(tf.constant(1.0, shape=[x.shape[-1]]), name='gamma',trainable=True)
# 计算此次批量的均值和方差
axises = np.arange(len(x.shape) - 1)
batch_mean, batch_var = tf.nn.moments(x, axises, name='moments')
# 滑动平均做衰减
ema = tf.train.ExponentialMovingAverage(decay=0.5)
def mean_var_with_update():
ema_apply_op = ema.apply([batch_mean, batch_var])
with tf.control_dependencies([ema_apply_op]):
return tf.identity(batch_mean),tf.identity(batch_var)
# train_phase 训练还是测试的flag
# 训练阶段计算runing_mean和runing_var,使用mean_var_with_update()函数
# 测试的时候直接把之前计算的拿去用 ema.average(batch_mean)
mean, var = tf.cond(train_phase, mean_var_with_update,
lambda:(ema.average(batch_mean), ema.average(batch_var)))
normed = tf.nn.batch_normalization(x, mean, var, beta, gamma, 1e-3)
return normed至于此行代码tf.nn.batch_normalization()就是简单的计算batchnorm过程啦,代码如下:
这个函数所实现的功能就如此公式:

def batch_normalization(x, mean, variance, offset,scale, variance_epsilon, name=None):
with ops.name_scope(name, "batchnorm", [x, mean, variance,scale, offset]):
inv = math_ops.rsqrt(variance + variance_epsilon)
if scale is not None:
inv *= scale
return x * inv + (offset - mean * inv
if offset is not Noneelse -mean * inv)3、Batchnorm的优点及缺点
主要部分说完了,接下来对BatchNorm做一个总结:
-
没有它之前,需要小心的调整学习率和权重初始化,但是有了BN可以放心的使用大学习率,但是使用了BN,就不用小心的调参了,较大的学习率极大的提高了学习速度,
-
Batchnorm本身上也是一种正则的方式,可以代替其他正则方式如dropout等
-
另外,个人认为,batchnorm降低了数据之间的绝对差异,有一个去相关的性质,更多的考虑相对差异性,因此在分类任务上具有更好的效果
六、droupout
Dropout是指在模型训练时随机让网络某些隐含层节点的权重不工作,不工作的那些节点可以暂时认为不是网络结构的一部分,但是它的权重得保留下来(只是暂时不更新而已),因为下次样本输入时它可能又得工作了。训练神经网络模型时,如果训练样本较少,为了防止模型过拟合,Dropout可以作为一种trikc供选择。
关于Dropout,文章中没有给出任何数学解释,Hintion的直观解释和理由如下:
1. 由于每次用输入网络的样本进行权值更新时,隐含节点都是以一定概率随机出现,因此不能保证每2个隐含节点每次都同时出现,这样权值的更新不再依赖于有固定关系隐含节点的共同作用,阻止了某些特征仅仅在其它特定特征下才有效果的情况。
2. 可以将dropout看作是模型平均的一种。对于每次输入到网络中的样本(可能是一个样本,也可能是一个batch的样本),其对应的网络结构都是不同的,但所有的这些不同的网络结构又同时share隐含节点的权值。这样不同的样本就对应不同的模型,是bagging的一种极端情况。个人感觉这个解释稍微靠谱些,和bagging,boosting理论有点像,但又不完全相同。(关于bagging 和 boosting 后边会简单学习并介绍,之前了解但是不理解)
3. native bayes是dropout的一个特例。Native bayes有个错误的前提,即假设各个特征之间相互独立,这样在训练样本比较少的情况下,单独对每个特征进行学习,测试时将所有的特征都相乘,且在实际应用时效果还不错。而Droput每次不是训练一个特征,而是一部分隐含层特征。
4. 还有一个比较有意思的解释是,Dropout类似于性别在生物进化中的角色,物种为了使适应不断变化的环境,性别的出现有效的阻止了过拟合,即避免环境改变时物种可能面临的灭亡。
更直观个人理解就是: droput 取50%的时候,每次训练都随机的discard 50%的隐含层的节点来进行训练,这样可以防止每次都是所有的特征选择器共同作用,一直放大或者缩小某些特征,在样本数据少的情况下很容易过拟合,并且泛化能力也很弱,所以才用dropout这种方法来实现能很好的避免训练过程中出现的这些问题。注意,在测试过程中采用的是全连接。
七、Targeted Dropout。
神经网络是一种非常灵活的模型,由于其参数众多,有利于学习,但也具有高度的冗余性。这使得在不影响性能的情况下压缩神经网络成为可能。
我们引入了有针对性的Targeted Dropout,这是一种对神经网络权重和单元进行剪枝的策略,它将剪枝机制直接引入到学习中。在每次权值更新时,Targeted Dropout使用一个简单的选择标准选择一个候选组进行剪枝,然后通过应用于该集合的dropout对网络进行随机剪枝。与更复杂的正则化方案相比,最终的网络学会了更鲁棒的剪枝,同时具有极其简单的实现和易于调整的特性。

?基础知识?
D r o p o u t
本次研究工作主要使用了两种最流行的Bernoulli Dropout技术,Hinton等人的Unit Dropout[1,2]和wan等人的Weight Dropout[3]。对于具有输入张量X、权重矩阵W、输出张量Y和Mask M的全连接层,定义了以下两种技术:
Unit Dropout:
![]()
Unit Dropout随机drop unit(有时称为神经元)在每个训练步骤,以减少unit之间的依赖,防止过拟合。

Weight Dropout:
![]()
在每个训练步骤中,Weight Dropout都会随机drop权重矩阵中的单个权重。直观地说,这是层间的dropping connection,迫使网络适应不同的连接在每一个训练步骤。
✂️Magnitude-based pruning✂️
一种流行的剪枝策略是那些Magnitude-based的剪枝策略。这些策略将Top-k的最大Magnitude权重视为重要因素,使用arg max-k返回所有考虑的元素中的Top-k元素(单位或权重)。
Unit Dropout:
考虑在L2范数下权矩阵的unit(列向量):

Weight Dropout:
在L1-范数下分别考虑权重矩阵的每一项。请注意,top-k相对于相同滤波器中的其他权重:

虽然weight剪枝倾向于在更粗的剪枝下保持更多的任务性能,但unit剪枝可以大大节省计算量。
⚠️ 方法 ⚠️
考虑一个由θ参数化的神经网络,且希望按照Unit Dropout和Weight Dropout定义的方法对W进行剪枝。
因此,希望找到最优参数θ*,它能令损失函数ε(W(θ*))尽可能小的同时,令|W(θ* )|≤k,即希望保留神经网络中最高数量级的k个权重。一个确定性的实现可以选择最小的|θ|−k个元素,并删除它们。但是如果这些较小的值在训练中变得更重要,那么它们的数值应该是增加的。因此,通过利用targeting proportion γ和删除概率α,将随机性引入到了这个过程中。
其中targeting proportion表示会选择最小的γ|θ|个权重作为Dropout的候选权值,并且随后以删除概率α独立地去除候选集合中的权值。这意味着在Targeted Dropout中每次权重更新所保留的单元数为(1−γ*α)|θ|。
正如在后文所看到的,Targeted Dropout降低了重要子网络对不重要子网络的依赖性,因此降低了对已训练神经网络进行剪枝的性能损失。如下表1和表2所示,权重剪枝实验表示正则化方案的基线结果要比Targeted Dropout差,并且应用了Tageted Dropout的模型比不加正则化的模型性能更好,且同时参数量只有一半。通过在训练过程中逐渐将targeting proportion由0增加到99%,最终表示该方法能获得极高的剪枝率。
https://github.com/for-ai/TD/tree/master/models