一.实验目的
了解STM32中定时器的原理。
掌握在STM32如何实现精确定时。
二.实验要求
了解STM32中定时器的原理。
掌握在STM32如何实现精确定时。
学习STM32通用定时器的编程方式,实现LED每秒闪烁一次。
三.实验软硬件
PC机一台
WINDOWS操作系统
ARM集成开发环境
WSN实验箱
四.实验步骤
1.定时器简介
STM32总共有8个定时器,TIM1和TIM8是16位的高级定时器,TIM2、TIM3、TIM4、TIM5是通用定时器。本实验中使用通用定时器TIM2,来实现精确定时。
通用定时器是一个通过可编程预分频器驱动的16 位自动装载计数器构成。这里为了体现其精确定时,用LED灯进行观察实验现象。如果有条件的实验室,可以配置示波器来观察信号情况。(特别是在做脉冲实验进行波形输出时)。使用定时器预分频器和RCC 时钟控制器预分频器,脉冲长度和波形周期可以在几个微秒到几个毫秒间调整。
2. 定时器时钟配置
如图4.20所示,TIMx的有八个,其中TIM1和TIM8挂在APB2总线上,而TIM2-TIM7则挂在APB1总线上。其中TIM1&TIM8称为高级控制定时器(advanced control timer).他们所在的APB2总线也比APB1总线要好。APB2可以工作在72MHz下,而APB1最大是36MHz。
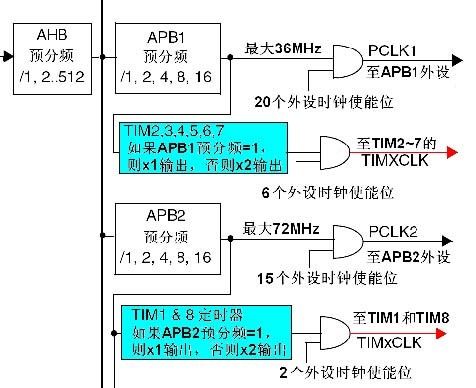
图4.17 TIM时钟配置
由图4.20可知,当APB1 的预分频系数为1 时,这个倍频器不起作用,定时器的时钟频率等于APB1 的频率;当APB1的预分频系数为其它数值(即预分频系数为2、4、8 或16)时,这个倍频器起作用,定时器的时钟频率等于APB1 的频率两倍。因为APB1最大为36MHz,而AHB预分频输出的频率为72MHz,所以APB1预分频器进行了2分频,所以定时器的时钟频率为2倍的APB1的频率,即72MHz。
3.通用定时器初始化配置
通用定时器初始化配置流程为:
3.1 首先进行配置一个TIM_TimeBaseInitTypeDef 的结构体。
例如:TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
3.2 将定时器TIMx设置为默认值的定时器。例如:TIM_DeInit(TIM2);
3.3根据TIM_TimeBaseInitStruct中指定的参数初始化TIMx的时间基数单位 。进行如下配置。
a.配置定时器的周期加载值(TIM_Period)。它设置了在下一个更新事件装入活动的自动重装载寄存器周期的值。它的取值必须在0x0000和0xFFFF之间。例如:
TIM_TimeBaseStructure.TIM_Period=1000;
b.设置定时器时钟预分频值(TIM_Prescaler)。设置了用来作为TIMx时钟频率除数的预分频值。它的取值必须在0x0000和0xFFFF之间。例如:
TIM_TimeBaseStructure.TIM_Prescaler= 71;
c.设置时钟分割。实验中设置为如下,即来自APB1的时钟不分频。
TIM_TimeBaseStructure.TIM_ClockDivision=TIM_CKD_DIV1;
d.选择定时器的计数方式。这里选择向上计数方式。其从0开始计数,当向上计数值增加到配置的周期加载值时,会触发定时器中断。然后计数值自动清零。
TIM_TimeBaseStructure.TIM_CounterMode=TIM_CounterMode_Up;
e.初始化定时器。调用定时器API函数为:TIM_TimeBaseInit();
f.实验中采用中断的方式进行精确定时。所以在初始化定时器时要清除以前的中断标志。调用定时器的中断标志位函数为:TIM_ClearFlag(TIMx, TIM_FLAG_Update);
g.使能定时器中断。调用定时器中断API函数为:
TIM_ITConfig(TIMx,TIM_IT_Update,ENABLE);
h.使能定时器TIM_Cmd(TIMx, ENABLE);
4.NVIC初始化配置
4.1.设置中断名称。本例为TIM2_IRQn。
4.2.中断优先级的设置。
4.3. IRQ通道使能。
4.4. 根据NVIC_InitStruct中指定的参数初始化外设NVIC寄存器TIM2.
以上为设置流程。根据以上设置,例如调用相关的API函数如下NVIC中断,具体请参考STM32数据手册。
NVIC_InitTypeDef NVIC_InitStructure;
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
NVIC_InitStructure.NVIC_IRQChannel = USART2_IRQn;//开TIM2中断
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
5.实现LED(绿灯和红灯)以1s、2s、5s的频率闪烁。其中配置GPIO、TIM的时钟;GPIO设置;定时器中断需要配置NVIC;定时器的初始化;以及定时器中断处理。
注:发生中断时间=(TIM_Prescaler+1)* (TIM_Period+1)/FLK(此处FLK为72MHz)
五.实验报告具体要求
实验报告应包括以下几个部分:
1.实验目的。
2.问题描述。
3.实验详细步骤(包含源码)。
4.实验过程中遇到的问题,及解决办法。
5.实验心得。
实验代码
#include "stm32f10x.h"
#include "stm32f10x_rtc.h"
#include "stm32f10x_tim.h"
#include "misc.h"
#include "core_cm3.h"
void RCC_Configuration(void);
void GPIO_Configuration(void);
void TIM_Configuration(void);
void TIM2_IRQHandler(void);
void NVIC_Configuration(void);
#define GreenLight_On() GPIO_SetBits(GPIOB,GPIO_Pin_8)
#define GreenLight_Off() GPIO_ResetBits(GPIOB,GPIO_Pin_8)
#define REDLight_On() GPIO_SetBits(GPIOB,GPIO_Pin_9)
#define REDLight_Off() GPIO_ResetBits(GPIOB,GPIO_Pin_9)
/*
* 函数名:main
* 描述 :主函数
* 输入 :无
* 输出 :无
*/
int main(void)
{
RCC_Configuration();
GPIO_Configuration();
NVIC_Configuration();
TIM_Configuration();
// 等待中断触发
while(1);
}
void RCC_Configuration(void)
{
ErrorStatus HSEStartUpStatus;
//编程习惯,用于异常处理
SystemInit(); //初始化微控制系统
RCC_DeInit(); //将RCC时钟控制器设为默认状态
//使能外部晶振
RCC_HSEConfig(RCC_HSE_ON);
//等待外部晶振稳定
/*这一步是必须的,不稳定的时钟无法为
外设如GPIO、UART、ADC等提供服务*/
HSEStartUpStatus = RCC_WaitForHSEStartUp();
//如果外部晶振启动成功,则进行下一步操作
if(HSEStartUpStatus==SUCCESS)
{
//设置HCLK(AHB时钟)=SYSCLK=72
RCC_HCLKConfig(RCC_SYSCLK_Div1);
//PCLK1(APB1) = HCLK/2=36MHZ
RCC_PCLK1Config(RCC_HCLK_Div2);
//PCLK2(APB2) = HCLK=72MHZ
RCC_PCLK2Config(RCC_HCLK_Div1);
//FLASH时序控制
//推荐值:SYSCLK = 0~24MHz Latency=0
// SYSCLK = 24~48MHz Latency=1
// SYSCLK = 48~72MHz Latency=2
//开启FLASH预取指令功能
FLASH_PrefetchBufferCmd(FLASH_PrefetchBuffer_Enable);
FLASH_SetLatency(FLASH_Latency_2);
//PLL设置 SYSCLK/1 * 9 = 8/1*6 = 9MHz
RCC_PLLConfig(RCC_PLLSource_HSE_Div1, RCC_PLLMul_9);
//启动PLL
RCC_PLLCmd(ENABLE);
//等待PLL稳定
while(RCC_GetFlagStatus(RCC_FLAG_PLLRDY) == RESET){};
//系统时钟SYSCLK来自PLL输出
RCC_SYSCLKConfig(RCC_SYSCLKSource_PLLCLK);
//切换时钟后等待系统时钟稳定
while(RCC_GetSYSCLKSource()!=0x08){};
}
//启动GPIO
RCC_APB2PeriphClockCmd( RCC_APB2Periph_GPIOB,ENABLE);
//启动TIM2
RCC_APB1PeriphClockCmd( RCC_APB1Periph_TIM2,ENABLE);
}
void GPIO_Configuration(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_Init(GPIOB, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_Init(GPIOB, &GPIO_InitStructure);
}
// TIM 配置
void TIM_Configuration(void)
{
void TIM_TimeBaseInit(TIM_TypeDef*TIMx,
TIM_TimeBaseInitTypeDef* TIM_TimeBaseInitStruct); //前面指是哪个TIM,后面指TimeBaseInitStruct结构体指针。
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure; //定义TIM初始化类型结构体变量
TIM_DeInit(TIM2);
TIM_TimeBaseStructure.TIM_Period = 9999; //设置自动重载计数周期值
TIM_TimeBaseStructure.TIM_Prescaler =7199; //设置分频系数
//设置用来作为TIMx时钟频率除数的预分频值 10Khz的计数频率
TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1; //设置时钟分频因子
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //设置为向上计数方式
TIM_TimeBaseInit(TIM2, &TIM_TimeBaseStructure);
TIM_ARRPreloadConfig(TIM2, ENABLE); //允许自动重装载寄存器(ARR)
TIM_ITConfig(TIM2,TIM_IT_Update,ENABLE); //允许TIM2溢出中断
TIM_Cmd(TIM2, ENABLE); //TIM2开启时钟
}
// TIM2 中断处理
void TIM2_IRQHandler(void)
{
int i, j;
TIM_ClearITPendingBit(TIM2, TIM_FLAG_Update);
//清除TIMx的中断待处理位:TIM 中断源
REDLight_On();
for(i = 0; i < 999; i++)
for(j = 0; j < 999; j++);
REDLight_Off();
}
//注意这里清除中断源,不然无法正确切换模式ON||OFF
// NVIC 配置
void NVIC_Configuration(void)
{
NVIC_InitTypeDef NVIC_InitStructure;
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
NVIC_InitStructure.NVIC_IRQChannel = TIM2_IRQn;//开TIM2中断
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
}
按照公式计算得到的单位是秒!
https://www.cnblogs.com/sankye/archive/2012/05/05/2484711.html
http://www.51hei.com/stm32/4261.html