安卓java c++ opencv3.4 视频实时传输
安卓java c++ 视频实时传输
要做一个视频实时传输并别图像追踪识别的项目。
本项目先采用TCP建立链接,然后在用UDP实时传输,用压缩图像帧内为JPEG的方式,加快传输速率。
下图是转的。。。
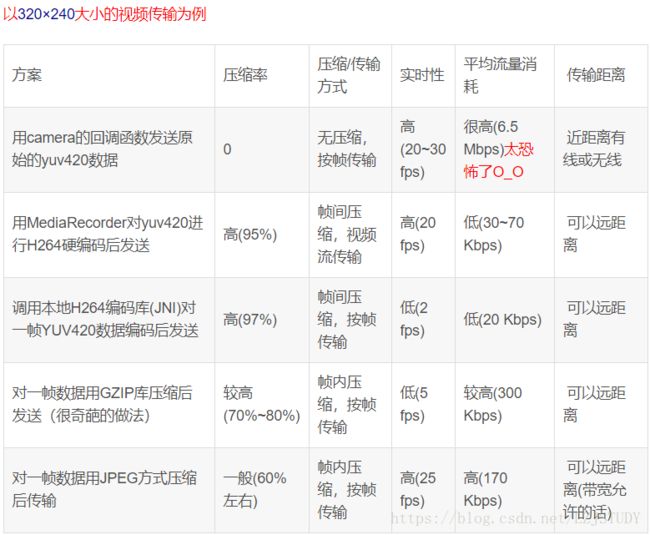
我采用的是第五种方案,为了牺牲了流量(局域网不怕),选了高FPS的。
安卓代码参考的别人的参考这里
public class MainActivity extends AppCompatActivity implements SurfaceHolder.Callback, Camera.PreviewCallback {
private final int TCP_PORT = 6666; //TCP通讯的端口号
private final int UDP_PORT = 7777; //UDP通讯的端口号
private final String SERVER_IP = "152.18.10.101"; //服务器端的IP地址
private Camera mCamera;
private Camera.Size previewSize;
private DatagramSocket packetSenderSocket; //发送图像帧的套接字
private long lastSendTime; //上一次发送图像帧的时间
private InetAddress serverAddress; //服务端地址
private final LinkedList packetList = new LinkedList<>();
@Override
protected void onCreate(Bundle savedInstanceState) {
super.onCreate(savedInstanceState);
setContentView(R.layout.activity_main);
final SurfaceView surfaceView = (SurfaceView) findViewById(R.id.surfaceView);
SurfaceHolder holder = surfaceView.getHolder();
holder.setKeepScreenOn(true);
holder.addCallback(this);
//开启通讯连接线程,连接服务端
new ConnectThread().start();
}
@Override
public void surfaceCreated(SurfaceHolder holder) {
//获取相机
if (mCamera == null) {
mCamera = Camera.open(); //打开后摄像头
Camera.Parameters parameters = mCamera.getParameters();
//设置预览图大小
//注意必须为parameters.getSupportedPreviewSizes()中的长宽,否则会报异常
parameters.setPreviewSize(960, 544);
previewSize = parameters.getPreviewSize();
//设置自动对焦
parameters.setFocusMode(Camera.Parameters.FOCUS_MODE_CONTINUOUS_PICTURE);
mCamera.setParameters(parameters);
mCamera.cancelAutoFocus();
//设置回调
try {
mCamera.setPreviewDisplay(holder);
mCamera.setPreviewCallback(this);
} catch (IOException e) {
e.printStackTrace();
}
}
//开始预览
mCamera.startPreview();
}
@Override
public void surfaceChanged(SurfaceHolder holder, int format, int width, int height) {
}
@Override
public void surfaceDestroyed(SurfaceHolder holder) {
//释放相机
if (mCamera != null) {
mCamera.setPreviewCallback(null);
mCamera.stopPreview();
mCamera.release();
mCamera = null;
}
}
/**
* 获取每一帧的图像数据
*/
@Override
public void onPreviewFrame(byte[] data, Camera camera) {
long curTime = System.currentTimeMillis();
//每20毫秒发送一帧
if (serverAddress != null && curTime - lastSendTime >= 20) {
lastSendTime = curTime;
//NV21格式转JPEG格式
YuvImage image = new YuvImage(data, ImageFormat.NV21, previewSize.width ,previewSize.height, null);
ByteArrayOutputStream bos = new ByteArrayOutputStream();
image.compressToJpeg(new Rect(0, 0, previewSize.width, previewSize.height), 40, bos);
int packMaxSize = 65500; //防止超过UDP包的最大大小
byte[] imgBytes = bos.toByteArray();
Log.i("tag", imgBytes.length + "");
//打包
DatagramPacket packet = new DatagramPacket(imgBytes, imgBytes.length > packMaxSize ? packMaxSize : imgBytes.length,
serverAddress, UDP_PORT);
//添加到队尾
synchronized (packetList) {
packetList.addLast(packet);
}
}
}
/**
* 连接线程
*/
private class ConnectThread extends Thread {
@Override
public void run() {
super.run();
try {
//创建连接
packetSenderSocket = new DatagramSocket();
Socket socket = new Socket(SERVER_IP, TCP_PORT);
serverAddress = socket.getInetAddress();
//断开连接
socket.close();
//启动发送图像数据包的线程
new ImgSendThread().start();
} catch (IOException e) {
e.printStackTrace();
}
}
}
/**
* 发送图像数据包的线程
*/
private class ImgSendThread extends Thread {
@Override
public void run() {
super.run();
while (packetSenderSocket != null) {
DatagramPacket packet;
synchronized (packetList) {
//没有待发送的包
if (packetList.isEmpty()) {
try {
Thread.sleep(10);
continue;
} catch (InterruptedException e) {
e.printStackTrace();
}
}
//取出队头
packet = packetList.getFirst();
packetList.removeFirst();
}
try {
packetSenderSocket.send(packet);
} catch (IOException e) {
e.printStackTrace();
}
}
}
}
}
UDP数据包看这里,实际上超不过1472字节,并不是65507字节,由以太网的物理特性决定的。参考这里: 网络-UDP,TCP数据包的最大传输长度分析
C++代码我自己写的
这是all.h
#ifndef ALL_H
#define ALL_H
#include
#include
#include
#include
#include
#include
using namespace cv;
#pragma comment(lib,"ws2_32.lib")
#define Formatted
int TCP_PORT = 6666; //TCP通讯的端口号
int UDP_PORT = 7777; //UDP通讯的端口号
const int BUF_SIZE = 1024 * 1024;//1M的缓存
WSADATA wsd;
SOCKET sServer;
SOCKET sClient;
SOCKADDR_IN addrServ;//服务器地址
char buf[BUF_SIZE];
int retVal;
#endif 这是tcprun.h
#ifndef TCP_RUN
#define TCP_RUN
#include "All.h"
class tcprun
{
public:
tcprun();
~tcprun();
int init(int port);
private:
};
tcprun::tcprun()
{
}
int tcprun::init(int port)
{
if (WSAStartup(MAKEWORD(2, 2), &wsd) != 0)
{
printf("调用socket库失败");
return -1;
}
sServer = socket(AF_INET, SOCK_STREAM, IPPROTO_TCP);
if (INVALID_SOCKET == sServer)
{
printf("无效套接字,失败");
WSACleanup();//清理网络环境,释放socket所占的资源
return -1;
}
addrServ.sin_family = AF_INET;
addrServ.sin_port = htons(port);//htons是将整型变量从主机字节顺序转变成网络字节顺序, 就是整数在地址空间存储方式变为高位字节存放在内存的低地址处。//这里是port端口3333
addrServ.sin_addr.s_addr = INADDR_ANY;//0.0.0.0(本机)
retVal = bind(sServer, (LPSOCKADDR)&addrServ, sizeof(SOCKADDR_IN));//绑定套接字
if (SOCKET_ERROR == retVal)
{
printf("绑定失败");
closesocket(sServer);
WSACleanup();
return -1;
}
retVal = listen(sServer, 1);
if (SOCKET_ERROR == retVal)
{
printf("监听失败");
closesocket(sServer);
WSACleanup();
return -1;
}
sockaddr_in addrClient;
int addrClientlen = sizeof(addrClient);
sClient = accept(sServer, (sockaddr FAR*)&addrClient, &addrClientlen);
if (INVALID_SOCKET == sClient)
{
printf("接收无效");
closesocket(sServer);
WSACleanup();
return -1;
}
char buff[1024];//输出内容
memset(buff, 0, sizeof(buff));
recv(sClient, buff, sizeof(buff), 0);
printf("%s\n", buff);
closesocket(sServer);
closesocket(sClient);
WSACleanup();//清理网络环境,释放socket所占的资源
}
tcprun::~tcprun()
{
}
#endif TCP里面的buff是为了测试是否TCP建立连接
这是新封装的udp类
#ifndef UdpAndPic_H
#define UdpAndPic_H
#include "All.h"
class UdpAndPic
{
public:
UdpAndPic();
~UdpAndPic();
void makepic(SOCKET s, int width, int height);
int init(int port, int width, int height);
};
UdpAndPic::UdpAndPic()
{
}
UdpAndPic::~UdpAndPic()
{
}
int UdpAndPic::init(int port, int width, int height)
{
WORD wVersionRequested;//套接字库版本号
WSADATA wsaData;
int err;
wVersionRequested = MAKEWORD(2, 2);//定义套接字的版本号
err = WSAStartup(wVersionRequested, &wsaData);//创建套接字
if (err != 0) { return 0; }///创建套接字失败处理
if (LOBYTE(wsaData.wVersion) != 2 || HIBYTE(wsaData.wVersion) != 2)
{
WSACleanup(); return 0;
} SOCKET SrvSock = socket(AF_INET, SOCK_DGRAM, 0);//创建套接字
SOCKADDR_IN SrvAddr;
SrvAddr.sin_addr.S_un.S_addr = inet_addr("0.0.0.0");//绑定服务端IP地址
SrvAddr.sin_family = AF_INET;//服务端地址族
SrvAddr.sin_port = htons(port);//绑定服务端端口号
bind(SrvSock, (SOCKADDR*)&SrvAddr, sizeof(SOCKADDR));
int len = sizeof(SOCKADDR);
memset(buf, 0, sizeof(buf));
SOCKADDR ClistAddr;
err = recvfrom(SrvSock, buf, BUF_SIZE, 0, (SOCKADDR*)&ClistAddr, &len);//等待接收客户端的请求到来
if (err == -1)
{
printf("%s\n", "接收失败");
}
//循环接收数据
printf("开始连接……");
makepic(SrvSock,width,height);//开始制图
closesocket(SrvSock);//关闭套接字
WSACleanup();
return 0;
}
void UdpAndPic::makepic(SOCKET SrvSock,int width,int height)
{
namedWindow("video", 0);//用参数0代表可以用鼠标拖拽大小,1不可以
while (true)
{
recv(SrvSock, buf, BUF_SIZE, 0);
printf(buf);
//buf为图像再内存中的地址
CvMat mat = cvMat(width, height, CV_8UC3, buf);//从内存读取 /*CvMat用已有数据data初始化矩阵*/
IplImage *pIplImage = cvDecodeImage(&mat, 1);//第二个参数为flag,在opencv文档中查询
cvShowImage("video", pIplImage);
//cvResizeWindow("video", width, height);//改变窗体大小
cvReleaseImage(&pIplImage);//cvDecodeImage产生的IplImage*对象***需要手动释放内存***
memset(buf, 0, sizeof(buf));
if (waitKey(100) == 27)
break;//按ASCII为27的ESC退出
}
}
#endif在函数makepic中,要注意的是,cvDecodeImage产生的IPLImage对象需要手动释放内存,不然就卡崩白屏。
我这里是接收到client传过来的字节流,存到char *buf里面,然后用CvMat从内存中读取JPEG的数据。opencv里有专门的函数可以解jpeg的,因为opencv 本来就依赖于libjpeg,在它上面解压缩jpeg文件。
最后是cpp
#ifndef TEST_RUN
#define TEST_RUN
#include "TcpRun.h"
#include "All.h"
#include "UdpAndPic.h"
int main()
{
tcprun *t = new tcprun();
UdpAndPic *u=new UdpAndPic();
if (t->init(6666) != -1)//6666是端口
{
printf("%s\n", "TCP正确,开始执行UDP…");
if (u->init(7777,640,480) != -1)//4444是端口,后面了两个是CvMat用已有数据data初始化矩阵的宽和高
{
}
else
{
printf("%s\n", "UDP错误");
}
}
else
{
printf("%s\n", "TCP错误");
}
system("PAUSE");
return 0;
}
#endif