E-PUCK2-webots下的仿真实现
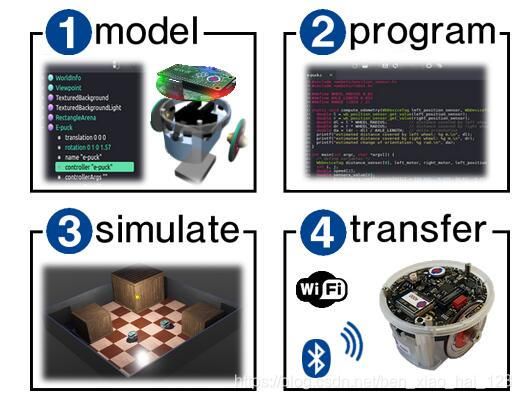
Webots是专业的移动机器人仿真软件包。它提供了快速的原型制作环境,使用户可以创建具有物理特性(例如质量,关节,摩擦系数等)的3D虚拟世界。用户可以添加简单的被动对象或称为移动机器人的主动对象。这些机器人可以具有不同的移动方案(轮式机器人,有腿机器人或飞行机器人)。此外,它们可能配备有许多传感器和执行器设备,例如距离传感器,驱动轮,摄像机,马达,触摸传感器,发射器,接收器等。最后,用户可以对每个机器人进行单独编程以表现出所需的行为。Webots包含大量机器人模型和控制器程序示例,以帮助用户入门。
Webots还包含许多与真实移动机器人的接口,因此,一旦您模拟的机器人表现出预期的行为,您就可以将其控制程序转移到诸如e-puck,DARwIn-OP,Nao等真实机器人上。可以添加新接口通过相关系统。
什么是世界?
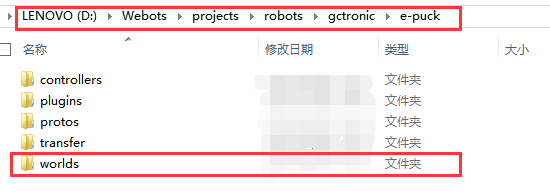
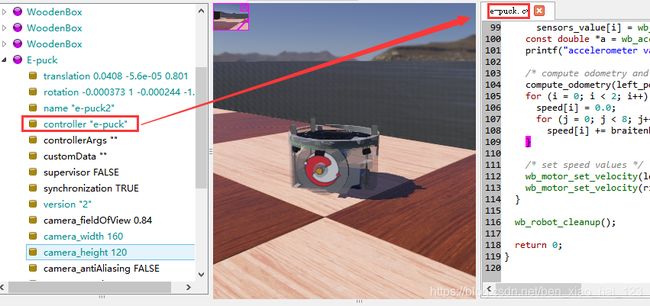
Webots中的世界是对机器人及其环境的属性的3D描述。它包含对每个对象的描述:位置,方向,几何形状,外观(如颜色或亮度),物理属性,对象类型等。世界组织为层次结构,其中对象可以包含其他对象(例如VRML97)。例如,一个机器人可以包含两个轮子,一个距离传感器和一个关节,该关节本身包含一个摄像头等。世界文件不包含机器人的控制器代码;它仅指定每个机器人所需的控制器名称。世界保存在“ .wbt”文件中。“ .wbt”文件存储在每个Webots项目的“ worlds”子目录中。

什么是控制器?
控制器是控制世界文件中指定的机器人的计算机程序。可以使用Webots支持的任何编程语言编写控制器:C,C ++,Java,Python或MATLAB。当模拟开始时,Webots将启动指定的控制器,每个控制器都是一个单独的进程,并将控制器进程与模拟的机器人相关联。请注意,多个机器人可以使用相同的控制器代码,但是将为每个机器人启动一个不同的过程。
一些编程语言需要编译(C和C ++),其他语言需要解释(Python和MATLAB),而另一些则需要同时进行编译和解释(Java)。例如,C和C ++控制器被编译为平台相关的二进制可执行文件(例如Windows下的“ .exe”)。Python和MATLAB控制器由相应的运行时系统(必须安装)解释。Java控制器需要编译为字节码(“ .class”文件或“ .jar”),然后由Java虚拟机进行解释。
每个控制器的源文件和二进制文件一起存储在控制器目录中。控制器目录放置在每个Webots项目的“ controllers”子目录中。
/*
* Copyright 1996-2019 Cyberbotics Ltd.
*
* Licensed under the Apache License, Version 2.0 (the "License");
* you may not use this file except in compliance with the License.
* You may obtain a copy of the License at
*
* http://www.apache.org/licenses/LICENSE-2.0
*
* Unless required by applicable law or agreed to in writing, software
* distributed under the License is distributed on an "AS IS" BASIS,
* WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
* See the License for the specific language governing permissions and
* limitations under the License.
*/
#include