Cocos creator(JavaScript)转盘抽奖
步骤
- 使用Cocos creator(JavaScript)转盘抽奖
- 运行结果
- 思路
- 主要代码
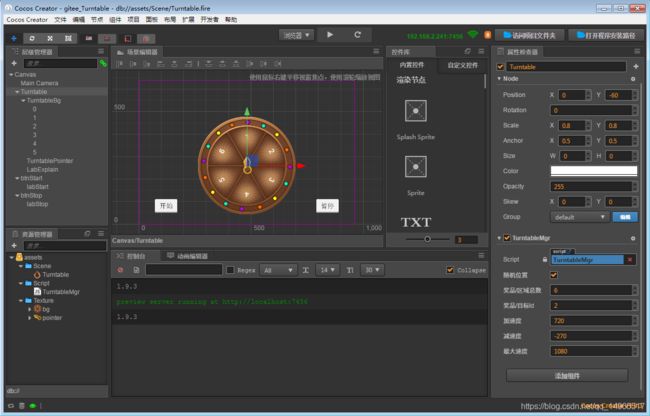
- 属性检查器
使用Cocos creator(JavaScript)转盘抽奖
运行结果
思路
将转盘分为两个阶段(加速和减速),首先让转盘按照固定的加速度转动,直到到达最大速度后按照设定好的减速度进行减速,速度减为0 时停止.这里我们需要计算出转盘从最大速度减速到0 一共转动的角度.然后通过目标Id 计算出目标角度,目标角度减去减速转动的角度可求得减速前转盘的角度(360°为一圈,这里最好将求得的角度求余去[0,360)区间的度数).最后在减速前将转盘置于计算出来的角度即可.
优化方向: 可以增加一个阶段加速后的匀速转动,以及转盘按照最大速度转动到求得的角度.
主要代码
TurntableMgr.js
cc.Class({
extends: cc.Component,
properties: {
boolRandom:{
default : false,
displayName : "随机位置",
tooltip : '确定结果区域后,是否在该区域内随机落下'
},
intTotalPrize:{
default : 6,
type : cc.Integer,
displayName : "奖品/区域总数",
tooltip : '游戏总奖品数'
},
intResultId:{
default : 1,
type : cc.Integer,
displayName : "奖品/目标Id",
tooltip : '中奖奖品'
},
floatAccelerated:{
default : 360 * 2,
type : cc.Float,
displayName : "加速度",
tooltip : '加速度值,每秒速度增加几度,°/s²'
},
floatDeceleration:{
default : -270,
type : cc.Float,
displayName : "减速度",
tooltip : '加速度值,每秒速度减少几度,°/s²'
},
floatMaxRangeSpeed:{
default : 360 * 3,
type : cc.Float,
displayName : "最大速度",
tooltip : '每秒速度减少几度,°/s'
}
},
// 初始化属性
initProperties() {
// 旋转角度范围
this._range = 360;
// 当前旋转速度
this._currentRotationSpeed = 0;
// 目标角度
this._targetRotation = 0;
// 目标节点
this._turntableBg = this.node.getChildByName("TurntableBg");
// 说明节点
this._labExplain = this.node.getChildByName("LabExplain").getComponent(cc.Label);
this._labExplain.string = '初始化成功'
// 处理奖品Id
if(this.intResultId <= 0 || this.intTotalPrize < this.intResultId || this.intTotalPrize <= 0)
{
this._labExplain.string = '区域总数或奖品Id不准确...'
}
this.intResultId = this.intTotalPrize + 1 - this.intResultId ;
// 时间间隔
this._interval = 0.02;
},
onLoad() {
this.initProperties();
},
/**
* 随机函数
* 方法: 将目标区域分为多个小块,随机落到除两边外其他位置(防止指针指到边上指示不明确)
*/
onRandomPlace() {
cc.log("随机该区域内位置")
var random = (Math.random() - 0.5) * this._range / (this.intTotalPrize + 2);
return random;
},
// 开始
onStart()
{
if(this._currentState == undefined || this._currentState == 0)
{
this._currentState = 1; // 0:静止 1:加速 2减速
this._turntableBg.rotation = 0;
}else{
cc.log("转盘已经开始转动...");
}
this.schedule(this.updateRotation, this._interval);
},
// 暂停
onStop()
{
if(this._currentState == undefined || this._currentState == 0)
{
cc.log("转盘已经停止...");
}else{
// 当前状态静止
this._labExplain.string = '转盘已经暂停...'
this.unschedule(this.updateRotation);
}
},
// 计算开始减速时机
onVirtualCompute()
{
// 虚拟转动角度
var virtualRotationAngle = 0;
// 虚拟角度速度
var rotationSpeed = this.floatMaxRangeSpeed;
while(rotationSpeed > 0)
{
virtualRotationAngle = virtualRotationAngle + rotationSpeed * this._interval;
rotationSpeed = rotationSpeed + this._interval * this.floatDeceleration;
}
return virtualRotationAngle;
},
// 获取开始减速的时机 角度
onGetValue(targetRotation)
{
var temp = targetRotation - this.onVirtualCompute();
if(temp > 0) {
while (temp >= 360) {
temp -= this._range;
}
} else {
while (temp < 0) {
temp += this._range;
}
}
return temp;
},
/**
* 转动检测
*/
detectionAngle() {
cc.log("角度检测中...")
cc.log("寻找合适减速时机...")
// 目标旋转角度
var targetRotation = this._range / this.intTotalPrize * this.intResultId;
if(this.boolRandom) {
targetRotation += this.onRandomPlace();
}
var tempRotation = this.onGetValue(targetRotation);
this._turntableBg.rotation = tempRotation;
cc.log("开始减速...");
this._currentState = 2;
},
/**
* 每一帧回调
* @param {*}
*/
updateRotation() {
switch (this._currentState) {
case 0:
this._labExplain.string = '静止中...'
break;
case 1:
{
if(this._currentRotationSpeed >= this.floatMaxRangeSpeed)
{
this._labExplain.string = '速度到达顶峰...'
this._currentRotationSpeed = this.floatMaxRangeSpeed;
this.detectionAngle();
}else
{
this._currentRotationSpeed += this.floatAccelerated * this._interval;
this._labExplain.string = '加速中...'
}
}
break;
case 2:
{
if(this._currentRotationSpeed <= 0)
{
this._labExplain.string = '速度到减为0...'
this._currentRotationSpeed = 0; //当前速度设置为 0rad/s
this._currentState = 0; //当前状态设置为 0
}else{
this._labExplain.string = '减速中...'
this._currentRotationSpeed += this.floatDeceleration * this._interval;
}
}
break;
default:
{
this._labExplain.string = '未知定义状态,强行停止旋转...'
this._currentRotationSpeed = 0; //当前速度设置为 0rad/s
this._currentState = 0; //当前状态设置为 0
}
break;
}
cc.log("当前旋转速度 : ",this._currentRotationSpeed);
var tempRotationSpeed = this._currentRotationSpeed * this._interval;
cc.log("当前转盘转动速度" + tempRotationSpeed + "°/" + this._interval + "s");
this._labExplain.string = this._labExplain.string + "\n当前转盘转动速度: " + Math.round(this._currentRotationSpeed) + "°/s";
this._turntableBg.rotation += tempRotationSpeed;
},
/**
* 统一回收组件
*/
onDestroy() {
this.node.onDestroy();
}
});
属性检查器
码云链接:https://gitee.com/ls_qq2670813470/Turntable.
原文链接:https://blog.csdn.net/qq_14965517/article/details/103905761.