计算机视觉——对极几何与基础矩阵
这里写目录标题
- 1、对极几何
- 1.1 极线约束
- 1.2 极点
- 1.3 基本矩阵F(8点算法)
- 2. 实验过程
- 2.1 实验要求
- 2.3 实验准备
- 2.4 实验结果
- 2.4.1 求基础矩阵F(8点法)
- 4.4.2 画出极点,极线
- 2.5 实验总结
- 2.6 遇到的问题
1、对极几何
对极几何是研究两幅图像之间存在的几何。它和场景结构无关,只依赖于摄像机的内外参数。研究这种几何可以用在图像匹配、三维重建方面。
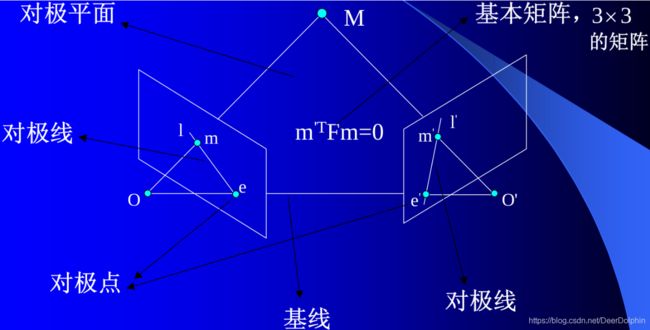
- 基线:连接两个摄像机光心 O ( O ′ ) O(O') O(O′)的直线
- 对极点:基线与像平面的交点
- 对极平面:过基线的平面
- 对极线:对极平面与图像平面的交线
- 基本矩阵F:对应点对之间的约束 m ′ T F ′ m = 0 m'^TF'm=0 m′TF′m=0
1.1 极线约束
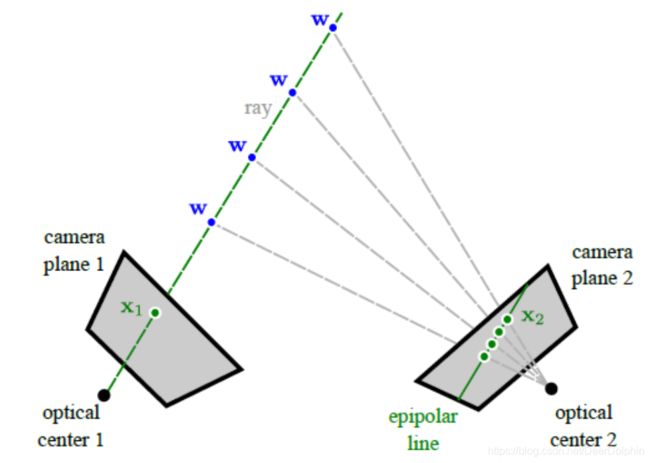
从第一个摄像机可得知,该点必定位于3D空间中的一条特定光线上。进而第二幅图像中该点的投影位置x2必定位于第二幅图像中这条光线投影上的某个位置。三维空间中的光线在二维空间中的投影就是所谓的极线。这种几何关系告诉我们一些重要信息:对于第一幅图像中的任意点,其在第二幅图像中的对应点被限制在一条线上。这就是所谓的极线约束。
1.2 极点
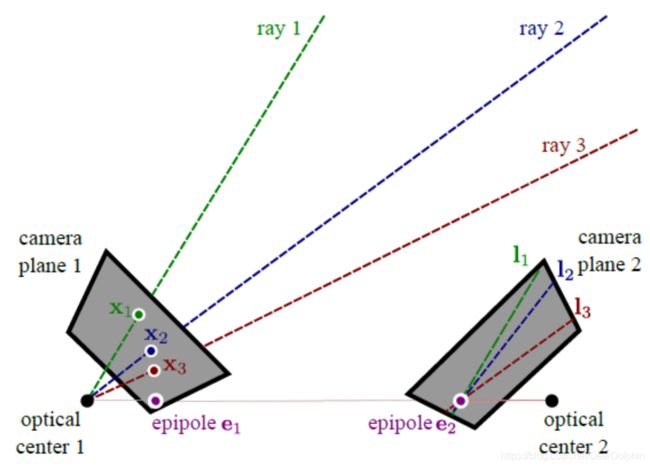
图像中每一个点都与三维空间中的一条光线相关联,每一条光线都在第二幅图像中投影而形成极线。由于所有的光线都汇聚于第一个摄像机的光心,所以极线必须汇聚于第二幅图像平面上的一个点。这是第一个摄像机的光心在第二个摄像机中的图像,称为极点。
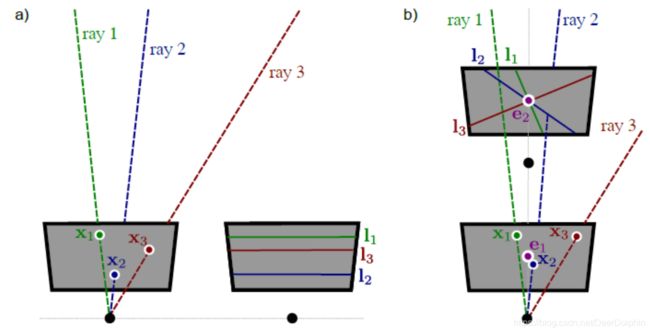
极点并不一定位于观测图像内:极线也可能汇聚于可视范围之外的某一点。当两个摄像机都位于同一方向(即没有相对旋转)且垂直于光轴时,极线是相互平行的,因此由极线汇聚的极点就位于无穷远处。当两个摄像机位于同一方向且平行于光轴时,极点就位于图像的中心且极线呈放射状。
1.3 基本矩阵F(8点算法)
一对对应点 m i = [ u i , v i , 1 ] T , m i ′ = [ u i ′ , v i ′ , 1 ] T m_i = [u_i,v_i,1]^T,m_i' = [u_i',v_i',1]^T mi=[ui,vi,1]T,mi′=[ui′,vi′,1]T之间满足约束: m i ′ T F ′ m i = 0 m_i'^TF'm_i = 0 mi′TF′mi=0
F = [ F 11 F 12 F 13 F 21 F 22 F 23 F 31 F 32 F 33 ] F = \left[ \begin{matrix} F_{11}& F_{12} & F_{13} \\ F_{21} & F_{22} & F_{23} \\ F_{31} & F_{32} & F_{33} \end{matrix} \right] F=⎣⎡F11F21F31F12F22F32F13F23F33⎦⎤
展开可以得到约束方程为:
u i ′ u i ′ F 11 + u i ′ v i ′ F 12 + u i ′ F 13 + v i ′ u i F 21 + v i ′ v i F 22 + v i ′ F 23 + u i F 31 + v i F 32 + F 33 = 0 u_i'u_i'F_{11} + u_i'v_i'F_{12} + u_i'F_{13} + v_i'u_iF_{21} + v_i'v_iF_{22} + v_i'F_{23} + u_iF_{31} + v_iF_{32} +F_{33} = 0 ui′ui′F11+ui′vi′F12+ui′F13+vi′uiF21+vi′viF22+vi′F23+uiF31+viF32+F33=0
对于n对对应的图像点对mi<->mi_'i=1…n可得到n个这样的方程
构造向量:
f = [ F 11 , F 12 , F 13 , F 21 , F 22 , F 23 , F 31 , F 32 , F 33 ] T f = [F_{11},F_{12},F_{13},F_{21},F_{22},F_{23},F_{31},F_{32},F_{33}]^T f=[F11,F12,F13,F21,F22,F23,F31,F32,F33]T
构造矩阵:
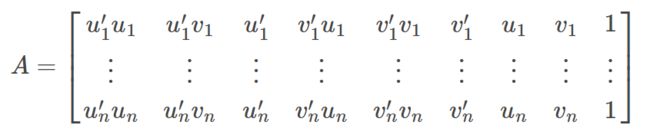
从而: A f = 0 Af = 0 Af=0当n>=8,可以线性求解f。
基于代数误差的估计方法是满足某些约束下使 ∣ ∣ A f ∣ ∣ || Af || ∣∣Af∣∣最小的算法
-
由对应点(n>=8)集构造矩阵A;
-
对A进行奇异值分解 A = U D V T A = UDV^T A=UDVT,由向量 f = v 9 f=v_9 f=v9构造矩阵F;
-
对F进行SVD分解 F = U d i a g ( s 1 s 2 s 3 ) V T F=Udiag(s1 s_2 s_3)V^T F=Udiag(s1s2s3)VT得到基本矩阵的估计F^ = U d i a g ( s 1 s 2 0 ) V T =Udiag(s_1 s_2 0)V^T =Udiag(s1s20)VT
-
8点算法估计基本矩阵F的结果与图像点的坐标系有关。当图像数据有噪声,即对应点不精确时,由8点算法给出的基本矩阵F的解精度很低。
-
存在一种归一化坐标系,在此坐标系下估计的基本矩阵优于其它坐标系。
-
归一化变换:
- 对图像点做位移变换,使得图像的原点位于图像点集的质心;
- 对图像点做缩放变换,使得图像点分布在以质心为圆心半径为 √ 2 √_2 √2
- 归一化8点算法:由对应点 m i < − > m i ′ m_i <-> m_i' mi<−>mi′,求F
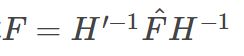
- 对两幅图像分别做归一化变换 H , H i ′ , H,H_i', H,Hi′,得到新的对应点集;
- 有新的对应点集和8点算法估计F^;
- 基本矩阵
2. 实验过程
2.1 实验要求
- 分别用七点、八点、十点(匹配点),计算基础矩阵
实验图片包含三种情况,即
(1)左右拍摄,极点位于图像平面上
(2)像平面接近平行,极点位于无穷远
(3)图像拍摄位置位于前后 - 针对上述情况,画出极点和极线,其中点坐标要均匀分布于各行
- 避免只用排在前五特征点的方式
2.3 实验准备
- 实验数据集
(1)左右拍摄
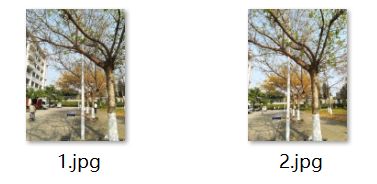
(2)相平面接近平行

(3)图像拍摄位置位于前后

2.4 实验结果
2.4.1 求基础矩阵F(8点法)
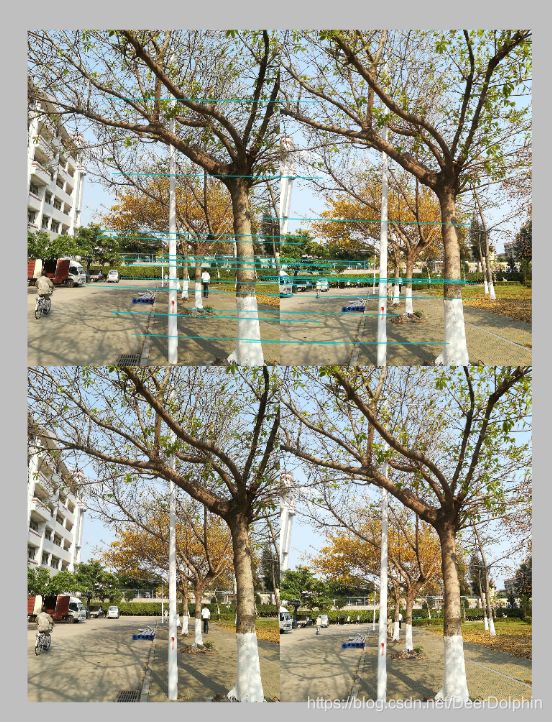
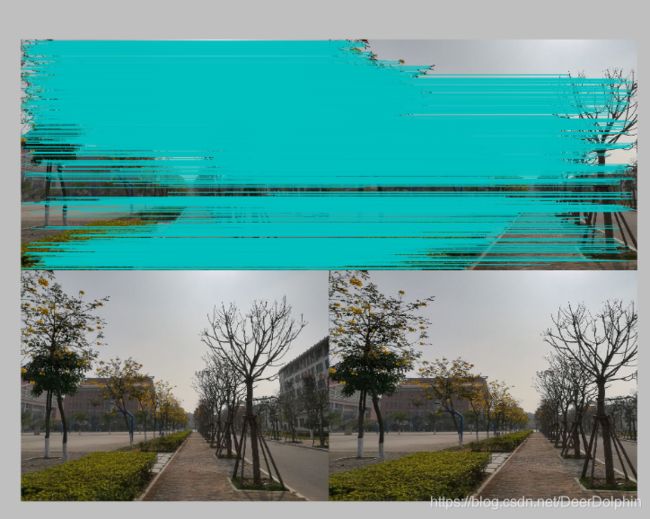
- 左右拍摄
(1)sift特征匹配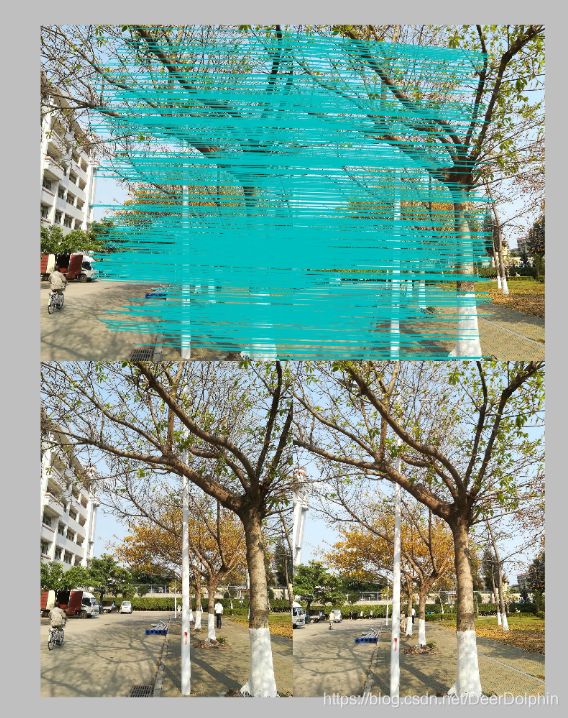
(2)ransac筛选匹配点
(3)八点法匹配结果
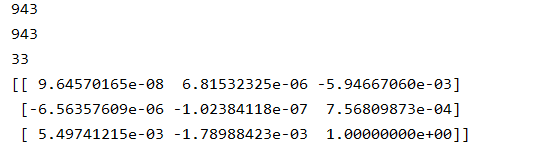
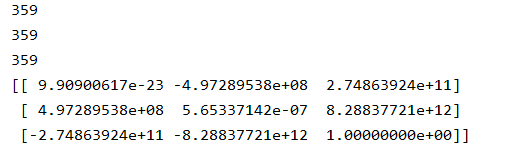
(4)基础矩阵F
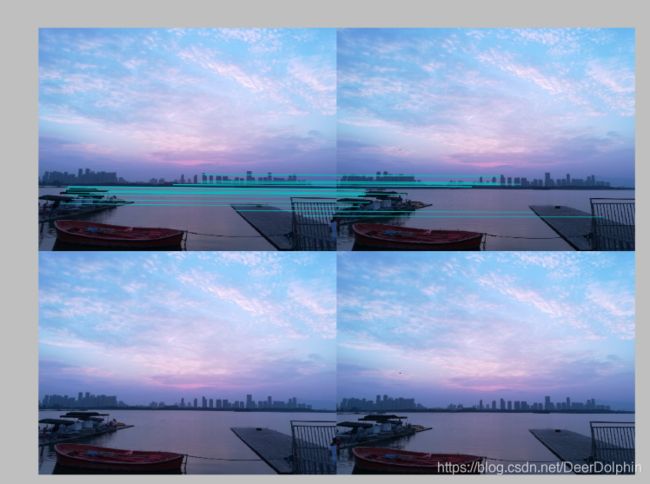
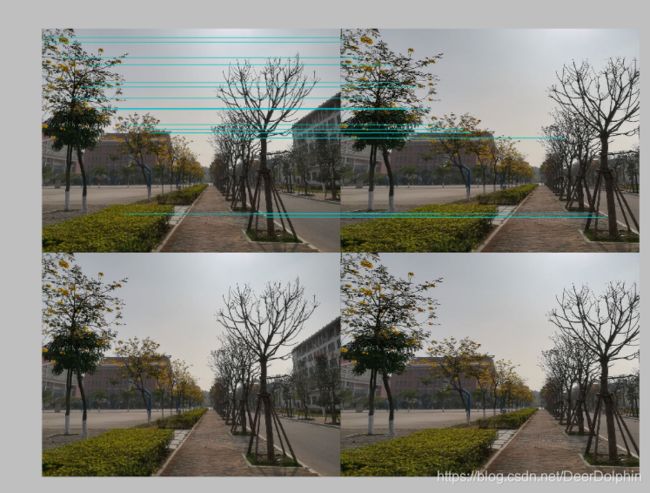
- 相平面接近平行
(1)sift特征匹配

(2)ransac筛选匹配点

(3)八点法匹配结果
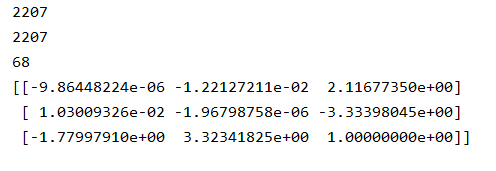
(4)基础矩阵F
- 图像拍摄位置位于前后
(1)sift特征匹配
(2)ransac筛选匹配点
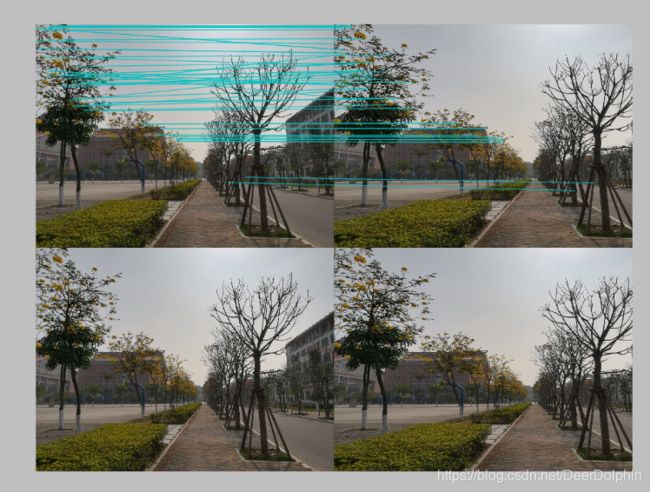
(3)八点法匹配结果
(4)基础矩阵F
4.4.2 画出极点,极线
(1)左右拍摄
(2)相平面接近平行
(3)图像拍摄位置位于前后
2.5 实验总结
- 从极点,极限的描绘结果来看:
- 我这组数据集的实验结果是比较失败的,左右拍摄时极点再图像上时比较好的结果,但是忧郁我两张图片左右拍摄的角度,移动不大,导致极点再图像外左侧边的位置,应适当增加左右拍摄的角度,极点才会交在在图像上;
- 像平面接近平行时:效果还行,但还是没达到理想的极线趋近平行的样子,不是太明白原因,因为两张图片是在同一水平和角度下拍摄的,对极线应该是趋于平行的样子;
- 拍摄位置位于前后这一组的结果直接变成了像平面平行时的效果,这应该归咎于我的拍摄,这两张图总体区别不大,只有一点点远近位置的差异,所以大体上变符合了平行时的条件,以至于对极线都平行了。
- 有很多组图片我都跑不出结果,即使图片大小、像素都一样,总会报错,我发现无论是求基本矩阵的代码,还是显示极点极线的代码,对图片规格的要求都比较高,很多图片都不能运行通过。
2.6 遇到的问题
- 运行时报错:AttributeError: module ‘cv2.cv2’ has no attribute ‘SIFT’
这是因为:还缺少一个包,cmd打开命令窗口,输入: pip install opencv-contrib-python
运行报错:Set OPENCV_ENABLE_NONFREE CMake option and rebuild the library in function ‘cv::xfeatures2d::SIFT::create’
解决:将opencv版本退到3.4.2即可解决,卸载之前的包(pip uninstall opencv-python),然后pip install opencv-python3.4.2.16
pip install opencv-contrib-python3.4.2.16
运行又报错:AttributeError: module ‘cv2.cv2’ has no attribute ‘xfeatures2d’
这是因为:opencv将SIFT等算法整合到xfeatures2d集合里面了。
siftDetector=cv2.SIFT()变更为siftDetector= cv2.xfeatures2d.SIFT_create() - 当图片像素过高或两张图片长宽大小不一致时也会报错,直接将像素值调低,让同一组的两张图片格式大小yi’zhi再尝试运行即可;
- 运行时报错:(未解决)

参考链接:
[1] https://www.cnblogs.com/majiale/p/9306039.html
[2] https://www.cnblogs.com/jqpy1994/p/10561891.html