- 遥感影像的切片处理
sand&wich
计算机视觉python图像处理
在遥感影像分析中,经常需要将大尺寸的影像切分成小片段,以便于进行详细的分析和处理。这种方法特别适用于机器学习和图像处理任务,如对象检测、图像分类等。以下是如何使用Python和OpenCV库来实现这一过程,同时确保每个影像片段保留正确的地理信息。准备环境首先,确保安装了必要的Python库,包括numpy、opencv-python和xml.etree.ElementTree。这些库将用于图像处理
- Python中cv2 (OpenCV, opencv-python)库的安装、使用方法demo最新详细教程
猫头虎
AI人工智能技术专栏pythonopencv开发语言计算机视觉语音识别目标检测神经网络
Python中cv2(OpenCV,opencv-python)库的安装、使用方法demo最新详细教程文章目录Python中cv2(OpenCV,opencv-python)库的安装、使用方法demo最新详细教程摘要引言正文OpenCV库概述安装OpenCV环境要求安装命令验证安装基础使用方法读取和显示图像图像处理示例❓常见问题解答小结参考资料表格总结总结和未来展望温馨提示摘要本文全面介绍了Pyt
- PyQt5 opencv-python
EQP Doctor
pythonqtopencv
importsysimportcv2importnumpyasnpfromPyQt5.QtWidgetsimportQApplication,QMainWindow,QPushButton,QVBoxLayout,QWidgetfromPyQt5.QtGuiimportQImage,QPixmapfromPyQt5.QtCoreimportQThread,pyqtSignalclassWorker
- 视频处理为视频帧出现cv2写入错误
尘埃里的苜蓿
opencvpython
问题:将视频处理为视频帧图片,执行cv2.imwrite("video"+"_%d.jpg"%frame_count,frame,params)语句时,Python出现报错。cv2.error:OpenCV(4.9.0)D:\a\opencv-python\opencv-python\opencv\modules\imgcodecs\src\loadsave.cpp:786:error:(-215
- opencv-python 图像增强十七:泊松图像融合
CV-King
opencvpython人工智能算法计算机视觉numpy
提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档文章目录前言一、概述二,实现:前言在深入探讨图像处理与计算机视觉领域的过程中,我们不禁对图像融合技术的精妙与实用性感到着迷。图像融合不仅是一项融合了美学与科学的技术手段,它还巧妙地将来源各异、特性不同的图像数据整合为一体,从而生成视觉上连贯且富含信息的合成图像。本篇博客文章旨在详尽解析OpenCV库中的一项高级功能cv2.seamle
- opencv-python 函数总览
周子青
函数名函数Chapterone:图片读入图像cv2.imread(filename[,flags])→retval显示图像cv2.imshow(winname,mat)→Nonecv2.waitKey([delay])→retval创建窗口cv2.namedWindow(winname[,flags])→None摧毁窗口cv2.destroyWindow(winname)→Nonecv2.dest
- 基于OpenCV-Python实现人脸识别-----摄像头捕获人脸图像显示中文乱码问题
匹数
opencvpython人工智能
基于OpenCV-Python实现人脸识别时,为了使图像上显示识别到人员的中文名字,做了几次尝试,使用PIL.Image和OpenCV图像格式相互转换解决:使用OpenCV将图片灰度化,对加载的灰度化图使用分类器中的detectMultiScale()函数查找目标人脸,并使用for循环实现矩形框和圆形框框住查找到的人脸。再使用OpenCV中识别器face.LBPHFaceRecognizer()方
- opencv-python 图像 二
夏树的宝马
http://opencv-python-tutroals.readthedocs.io/en/latest/py_tutorials/py_gui/py_drawing_functions/py_drawing_functions.html直线cv2.line(img,(起始点),(终点),(颜色),px大小)颜色为bgr>>>importcv2>>>importnumpyasnp>>>img=
- python中绘制数组直方图一维数组划分10组_opencv-python 绘制直方图和均衡化
weixin_39607935
直方图什么是直方图?一个数字图像是由像素点组成的,每个像素点在计算机里都是以二进制代码存储的,通常都是8bit编码,也就是说一个像素的可能值是00H到FFH,如果是灰度图像,那么每个像素值便代表它的灰度值,如果是RGB三通道图像,每个像素值是一个数组比如[60,40,244]它代表每个通道的灰度值。直方图用来统计每个灰度值出现的次数。也就是每个灰度值出现的频数,横坐标是像素点的值,比如8bit编码
- opencv-python灰度直方图详解
Vertira
opencvopencvpython直返图
1,直方图的概念图像直方图是反映一个图像像素分布的统计表,其实横坐标代表了图像像素的种类,可以是灰度的,也可以是彩色的。纵坐标代表了每一种颜色值在图像中的像素总数或者占所有像素个数的百分比。图像是由像素构成,因为反映像素分布的直方图往往可以作为图像一个很重要的特征。图像灰度直方图:一幅图像由不同灰度值的像素组成,图像中灰度的分布情况是该图像的一个重要特征。图像的灰度直方图就描述了图像中灰度分布情况
- OpenCV-Python无代码提示解决(步骤详细)
离谱270
python开发语言opencv
2023年5月8日,Python、PyCharm、OpenCV-Python均为最新版本,刚开始学习就遇到了一个严重的问题,cv2没有代码提示!查了非常多资料:1.改__init__.py2.将OpenCV重新下载3.将cv2.pyd放入同文件下的data文件夹内4.5.importcv2.cv2ascv2以上的方法都无效(对本人而言)有效的方法:先打开设置,再找到PythonInterprete
- OpenCV-Python学习(九):图像滤波
星光下的胖子
目录:1.滤波的相关概念2.卷积操作3.平滑操作(低通滤波)均值滤波中值滤波高斯滤波双边滤波4.锐化操作(高通滤波)自定义锐化核USM锐化(UnsharpMask)5.梯度操作(高通滤波)Sobel算子Scharr算子Laplacian算子一、滤波的概念滤波是将信号中特定波段频率滤除的操作,是抑制和防止干扰的一项重要措施。图像滤波是图像预处理中不可缺少的操作,其处理效果的好坏将直接影响到后续图像处
- 视频处理VideoCapture类---OpenCV-Python开发指南(38)
极客学编程
视频视频是非常重要的视觉信息来源,它是视觉处理过程中经常要处理的一类信号。实际上,视频是由一系列图像构成,这一系列的图像被称为帧,帧是以固定时间间隔从视频中获取的。获取帧的速度称为帧速率,其单位通常使用“帧率/每秒”表示,代表在1秒内所出现的帧数,也就是游戏迷称为的FPS。如果我们从视频中提取出独立的帧,就可以使用图像处理的方法对其进行处理,达到处理视频的目的。VideoCapture类在Open
- pip install opencv-python安装报错
玄嫇
OpenCVpythonpipopencv
目录前言报错解决方法检查是否成功安装前言我需要用pytorch进行深度学习和研究,所以安装的是opencv-python。在安装OpenCV之前,我已经安装好python和numpy。安装python3:廖雪峰python教程有详细的说明,网址安装python安装numpy:pipinstallnumpy报错当我在命令行中输入pipinstallopencv-python后,出现了以下的报错提示:
- Linux系统下python pip/conda安装opencv(opencv-python)编译出错解决方法
ZXF_H
pythonlinuxlinuxpythonpip
问题描述:提示编译出错(不同的pip/conda/linux版本报的错误不一致)错误一:Traceback(mostrecentcalllast):File"/usr/local/lib/python3.6/dist-packages/pip/_vendor/pep517/_in_process.py",line280,inmain()File"/usr/local/lib/python3.6/d
- Python中使用opencv-python进行人脸检测
雪域迷影
OpenCVPython编程编程语言学习opencvpython人工智能
Python中使用opencv-python进行人脸检测之前写过一篇VC++中使用OpenCV进行人脸检测的博客。以数字图像处理中经常使用的lena图像为例,如下图所示:使用OpenCV进行人脸检测十分简单,OpenCV官网给了一个Python人脸检测的示例程序,objectDetection.py代码如下:from__future__importprint_functionimportcv2as
- Python中使用opencv-python库进行颜色检测
雪域迷影
OpenCVPython编程编程语言学习pythonopencv开发语言
Python中使用opencv-python库进行颜色检测之前写过一篇VC++中使用OpenCV进行颜色检测的博文,当然使用opencv-python库也可以实现。在Python中使用opencv-python库进行颜色检测非常简单,首选读取一张彩色图像,并调用函数imgHSV=cv2.cvtColor(img,cv2.COLOR_BGR2HSV);函数将原图img转换成HSV图像imgHSV,再
- Python cv2 opencv-python opencv-contrib-python 安装
DancingCat~
Pythonopencvpython计算机视觉
老规矩,话不多说,上代码!pipinstallopencv-python(如果只用主模块,则使用这个命令安装【推荐】)pipinstallopencv-contrib-python(如果需要用到contrib模块,则使用这个命令【本次因自己没有使用contrib模块,所以没有尝试】)首先,讲一下cv2这个模块是opencv的,所以安装的时候使用的是opencv-python。安装完找到安装第三方库
- 基于opencv-python模板匹配的银行卡号识别(附源码)
橘柚jvyou
opencvpython人工智能计算机视觉
目录介绍数字模板处理银行卡图片处理导入数字模板模板匹配及结果介绍我们有若干个银行卡图片和一个数字模板图片,如下图我们的目的就是通过对银行卡图片进行一系列图像操作使得我们可以用这个数字模板检测出银行卡号。数字模板处理首先我们先对数字模板进行处理,处理的目的是将数字模板中的每个数字分割开来。先导入需要用到的包importcv2importosimportnumpyasnpimportmatplotli
- OpenCV-Python图像模糊处理
Youth_Hong
其实我们平时在深度学习中所说的卷积操作,在opencv中也可以进行,或者说是类似操作。那么它是什么操作呢?它就是图像的模糊(滤波)处理。均值滤波使用opencv中的cv2.blur(src,ksize)函数。其参数说明是:src:原图像ksize:模糊核大小原理:它只取内核区域下所有像素的平均值并替换中心元素。3x3标准化的盒式过滤器如下所示:3×3标准过滤器特征:核中区域贡献率相同。作用:对于椒
- 人脸检测---OpenCV-Python开发指南(41)
极客学编程
人脸检测函数在OpenCV中,人脸检测使用的函数是cv2.CascadeClassifier.detectMultiScale(),它可以检测图像中所有的人脸。其完整定义如下:defdetectMultiScale(self,image,scaleFactor=None,minNeighbors=None,flags=None,minSize=None,maxSize=None):image:待检
- 数字图像处理(实践篇)四十三 OpenCV-Python 使用SURF算法检测图像上的特征点的实践
Jackilina_Stone
数字图像处理(入门篇实践篇综合篇)python数字图像处理计算机视觉OpenCV
目录一SURF算法概述1积分图2SURF算法3SIFT与SURF二涉及的函数三实践一SURF算法概述
- opencv-python 图像 四
夏树的宝马
http://opencv-python-tutroals.readthedocs.io/en/latest/py_tutorials/py_core/py_basic_ops/py_basic_ops.html#basic-ops图像的基本操作1.可以通过下标直接访问对应的值,由于我们加载的图片大多都是BGR的所以会反悔3个值px=img[100,100]blue=img[100,100,0]#
- opencv imshow()报错cv2.error: OpenCV(4.8.1) D:\a\opencv-python\opencv-python\opencv\modules\highgui\sr
顺利毕业(研)
opencvpython人工智能
报错原因因为你电脑安装了4.8版本的opencv-python-headless,我估计和主模块的版本不对应或者多个包功能重复问题解决方案:直接命令行窗口pipuninstallopencv-python-headless直接返回源程序重新运行,问题解决。
- Python中使用Opencv-python库绘制直线、矩形、圆、文本
雪域迷影
OpenCVPython编程编程语言学习pythonopencv
Python中使用Opencv-python库绘制直线、矩形、圆、文字在Python中使用Opencv-python绘制直线、矩形、圆、文本非常简单,分别使用到line、rectangle、circle、putText这几个函数,具体可以参考https://docs.opencv.org/4.9.0/d6/d6e/group__imgproc__draw.html#ga7078a9fae8c7e7
- C#中使用OpenCvSharp4绘制直线、矩形、圆、文本
雪域迷影
OpenCVC#WinForm和WPF编程语言学习c#开发语言opencv
C#中使用OpenCvSharp4绘制直线、矩形、圆、文本继之前的Python中使用Opencv-python库绘制直线、矩形、圆、文本和VC++中使用OpenCV绘制直线、矩形、圆和文字,将之前的Python和C++示例代码翻译成C#语言,很简单,还是借用OpenCvSharp4库中的Line、Rectangle、Circle、PutText,值得一提的是https://github.com/o
- 数字图像处理(实践篇)四十一 OpenCV-Python 使用sift算法检测图像上的特征点实践
Jackilina_Stone
数字图像处理(入门篇实践篇综合篇)pythonOpenCV数字图像处理计算机视觉
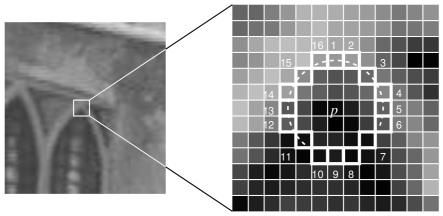
目录一涉及的函数二实践2004年,D.Lowe在论文DistinctiveImageFeaturesfromScale-InvariantKeypoints中提出了一种新算法,即尺度不变特征变换(SIFT),该算法提取关键点并计算其描述符。SIFT提取图像的局部特征,在尺度空间寻找极值点,并提取出其位置尺度和方向信息。SIFT算法所查找的关键点都是一些十分突出,不会因光照仿射变换和噪声等因素而变换
- opencv特征点匹配_opencv-python 4.2 BFMatcher匹配特征点
福建低调
opencv特征点匹配
importcv2frommatplotlibimportpyplotasplt#读取需要特征匹配的两张照片,格式为灰度图。img1=cv2.imread("water1.jpg",0)img2=cv2.imread("water2.jpg",0)#BFMatcher匹配orb=cv2.ORB_create()#建立orb特征检测器kp1,des1=orb.detectAndCompute(img
- 【OpenCV-Python】——边缘和轮廓&Laplacian/Sobel/Canny边缘检测&查找/绘制轮廓及轮廓特征&霍夫直线/圆变换
柯宝最帅
OpenCV学习opencv计算机视觉人工智能
目录前言:1、边缘检测1.1Laplacian边缘检测1.2Sobel边缘检测1.3Canny边缘检测2、图像轮廓2.1查找轮廓2.2绘制轮廓2.3轮廓特征3、霍夫变换3.1霍夫直线变换3.2霍夫圆变换总结:前言:图像的边缘是指图像中灰度值急剧变化的位置,边缘检测的目的是为了绘制边缘线条。边缘检测的目的是为了绘制出边缘线条。边缘通常是不连续的,不能表示整体。图像的轮廓是指将边缘连接起来形成的整体。
- ComfyUI报错AttributeError: module ‘cv2.gapi.wip.draw‘ has no attribute ‘Text‘
星辰同学wwq
ComfyUIopencvAIGCcomfyuipython
ComfyUI在安装comfyui-reactor-node插件,然后启动之后突然报错:AttributeError:module'cv2.gapi.wip.draw'hasnoattribute'Text'这是怎么回事呢?于是四处搜寻答案。总之就是opencv-python版本的问题导致的。我将有可能解决办法的方法进行了总结。下面列出所有解决办法:(1)安装opencv-python==4.7.
- html页面js获取参数值
0624chenhong
html
1.js获取参数值js
function GetQueryString(name)
{
var reg = new RegExp("(^|&)"+ name +"=([^&]*)(&|$)");
var r = windo
- MongoDB 在多线程高并发下的问题
BigCat2013
mongodbDB高并发重复数据
最近项目用到 MongoDB , 主要是一些读取数据及改状态位的操作. 因为是结合了最近流行的 Storm进行大数据的分析处理,并将分析结果插入Vertica数据库,所以在多线程高并发的情境下, 会发现 Vertica 数据库中有部分重复的数据. 这到底是什么原因导致的呢?笔者开始也是一筹莫 展,重复去看 MongoDB 的 API , 终于有了新发现 :
com.mongodb.DB 这个类有
- c++ 用类模版实现链表(c++语言程序设计第四版示例代码)
CrazyMizzz
数据结构C++
#include<iostream>
#include<cassert>
using namespace std;
template<class T>
class Node
{
private:
Node<T> * next;
public:
T data;
- 最近情况
麦田的设计者
感慨考试生活
在五月黄梅天的岁月里,一年两次的软考又要开始了。到目前为止,我已经考了多达三次的软考,最后的结果就是通过了初级考试(程序员)。人啊,就是不满足,考了初级就希望考中级,于是,这学期我就报考了中级,明天就要考试。感觉机会不大,期待奇迹发生吧。这个学期忙于练车,写项目,反正最后是一团糟。后天还要考试科目二。这个星期真的是很艰难的一周,希望能快点度过。
- linux系统中用pkill踢出在线登录用户
被触发
linux
由于linux服务器允许多用户登录,公司很多人知道密码,工作造成一定的障碍所以需要有时踢出指定的用户
1/#who 查出当前有那些终端登录(用 w 命令更详细)
# who
root pts/0 2010-10-28 09:36 (192
- 仿QQ聊天第二版
肆无忌惮_
qq
在第一版之上的改进内容:
第一版链接:
http://479001499.iteye.com/admin/blogs/2100893
用map存起来号码对应的聊天窗口对象,解决私聊的时候所有消息发到一个窗口的问题.
增加ViewInfo类,这个是信息预览的窗口,如果是自己的信息,则可以进行编辑.
信息修改后上传至服务器再告诉所有用户,自己的窗口
- java读取配置文件
知了ing
1,java读取.properties配置文件
InputStream in;
try {
in = test.class.getClassLoader().getResourceAsStream("config/ipnetOracle.properties");//配置文件的路径
Properties p = new Properties()
- __attribute__ 你知多少?
矮蛋蛋
C++gcc
原文地址:
http://www.cnblogs.com/astwish/p/3460618.html
GNU C 的一大特色就是__attribute__ 机制。__attribute__ 可以设置函数属性(Function Attribute )、变量属性(Variable Attribute )和类型属性(Type Attribute )。
__attribute__ 书写特征是:
- jsoup使用笔记
alleni123
java爬虫JSoup
<dependency>
<groupId>org.jsoup</groupId>
<artifactId>jsoup</artifactId>
<version>1.7.3</version>
</dependency>
2014/08/28
今天遇到这种形式,
- JAVA中的集合 Collectio 和Map的简单使用及方法
百合不是茶
listmapset
List ,set ,map的使用方法和区别
java容器类类库的用途是保存对象,并将其分为两个概念:
Collection集合:一个独立的序列,这些序列都服从一条或多条规则;List必须按顺序保存元素 ,set不能重复元素;Queue按照排队规则来确定对象产生的顺序(通常与他们被插入的
- 杀LINUX的JOB进程
bijian1013
linuxunix
今天发现数据库一个JOB一直在执行,都执行了好几个小时还在执行,所以想办法给删除掉
系统环境:
ORACLE 10G
Linux操作系统
操作步骤如下:
第一步.查询出来那个job在运行,找个对应的SID字段
select * from dba_jobs_running--找到job对应的sid
&n
- Spring AOP详解
bijian1013
javaspringAOP
最近项目中遇到了以下几点需求,仔细思考之后,觉得采用AOP来解决。一方面是为了以更加灵活的方式来解决问题,另一方面是借此机会深入学习Spring AOP相关的内容。例如,以下需求不用AOP肯定也能解决,至于是否牵强附会,仁者见仁智者见智。
1.对部分函数的调用进行日志记录,用于观察特定问题在运行过程中的函数调用
- [Gson六]Gson类型适配器(TypeAdapter)
bit1129
Adapter
TypeAdapter的使用动机
Gson在序列化和反序列化时,默认情况下,是按照POJO类的字段属性名和JSON串键进行一一映射匹配,然后把JSON串的键对应的值转换成POJO相同字段对应的值,反之亦然,在这个过程中有一个JSON串Key对应的Value和对象之间如何转换(序列化/反序列化)的问题。
以Date为例,在序列化和反序列化时,Gson默认使用java.
- 【spark八十七】给定Driver Program, 如何判断哪些代码在Driver运行,哪些代码在Worker上执行
bit1129
driver
Driver Program是用户编写的提交给Spark集群执行的application,它包含两部分
作为驱动: Driver与Master、Worker协作完成application进程的启动、DAG划分、计算任务封装、计算任务分发到各个计算节点(Worker)、计算资源的分配等。
计算逻辑本身,当计算任务在Worker执行时,执行计算逻辑完成application的计算任务
- nginx 经验总结
ronin47
nginx 总结
深感nginx的强大,只学了皮毛,把学下的记录。
获取Header 信息,一般是以$http_XX(XX是小写)
获取body,通过接口,再展开,根据K取V
获取uri,以$arg_XX
&n
- 轩辕互动-1.求三个整数中第二大的数2.整型数组的平衡点
bylijinnan
数组
import java.util.ArrayList;
import java.util.Arrays;
import java.util.List;
public class ExoWeb {
public static void main(String[] args) {
ExoWeb ew=new ExoWeb();
System.out.pri
- Netty源码学习-Java-NIO-Reactor
bylijinnan
java多线程netty
Netty里面采用了NIO-based Reactor Pattern
了解这个模式对学习Netty非常有帮助
参考以下两篇文章:
http://jeewanthad.blogspot.com/2013/02/reactor-pattern-explained-part-1.html
http://gee.cs.oswego.edu/dl/cpjslides/nio.pdf
- AOP通俗理解
cngolon
springAOP
1.我所知道的aop 初看aop,上来就是一大堆术语,而且还有个拉风的名字,面向切面编程,都说是OOP的一种有益补充等等。一下子让你不知所措,心想着:怪不得很多人都和 我说aop多难多难。当我看进去以后,我才发现:它就是一些java基础上的朴实无华的应用,包括ioc,包括许许多多这样的名词,都是万变不离其宗而 已。 2.为什么用aop&nb
- cursor variable 实例
ctrain
variable
create or replace procedure proc_test01
as
type emp_row is record(
empno emp.empno%type,
ename emp.ename%type,
job emp.job%type,
mgr emp.mgr%type,
hiberdate emp.hiredate%type,
sal emp.sal%t
- shell报bash: service: command not found解决方法
daizj
linuxshellservicejps
今天在执行一个脚本时,本来是想在脚本中启动hdfs和hive等程序,可以在执行到service hive-server start等启动服务的命令时会报错,最终解决方法记录一下:
脚本报错如下:
./olap_quick_intall.sh: line 57: service: command not found
./olap_quick_intall.sh: line 59
- 40个迹象表明你还是PHP菜鸟
dcj3sjt126com
设计模式PHP正则表达式oop
你是PHP菜鸟,如果你:1. 不会利用如phpDoc 这样的工具来恰当地注释你的代码2. 对优秀的集成开发环境如Zend Studio 或Eclipse PDT 视而不见3. 从未用过任何形式的版本控制系统,如Subclipse4. 不采用某种编码与命名标准 ,以及通用约定,不能在项目开发周期里贯彻落实5. 不使用统一开发方式6. 不转换(或)也不验证某些输入或SQL查询串(译注:参考PHP相关函
- Android逐帧动画的实现
dcj3sjt126com
android
一、代码实现:
private ImageView iv;
private AnimationDrawable ad;
@Override
protected void onCreate(Bundle savedInstanceState)
{
super.onCreate(savedInstanceState);
setContentView(R.layout
- java远程调用linux的命令或者脚本
eksliang
linuxganymed-ssh2
转载请出自出处:
http://eksliang.iteye.com/blog/2105862
Java通过SSH2协议执行远程Shell脚本(ganymed-ssh2-build210.jar)
使用步骤如下:
1.导包
官网下载:
http://www.ganymed.ethz.ch/ssh2/
ma
- adb端口被占用问题
gqdy365
adb
最近重新安装的电脑,配置了新环境,老是出现:
adb server is out of date. killing...
ADB server didn't ACK
* failed to start daemon *
百度了一下,说是端口被占用,我开个eclipse,然后打开cmd,就提示这个,很烦人。
一个比较彻底的解决办法就是修改
- ASP.NET使用FileUpload上传文件
hvt
.netC#hovertreeasp.netwebform
前台代码:
<asp:FileUpload ID="fuKeleyi" runat="server" />
<asp:Button ID="BtnUp" runat="server" onclick="BtnUp_Click" Text="上 传" />
- 代码之谜(四)- 浮点数(从惊讶到思考)
justjavac
浮点数精度代码之谜IEEE
在『代码之谜』系列的前几篇文章中,很多次出现了浮点数。 浮点数在很多编程语言中被称为简单数据类型,其实,浮点数比起那些复杂数据类型(比如字符串)来说, 一点都不简单。
单单是说明 IEEE浮点数 就可以写一本书了,我将用几篇博文来简单的说说我所理解的浮点数,算是抛砖引玉吧。 一次面试
记得多年前我招聘 Java 程序员时的一次关于浮点数、二分法、编码的面试, 多年以后,他已经称为了一名很出色的
- 数据结构随记_1
lx.asymmetric
数据结构笔记
第一章
1.数据结构包括数据的
逻辑结构、数据的物理/存储结构和数据的逻辑关系这三个方面的内容。 2.数据的存储结构可用四种基本的存储方法表示,它们分别是
顺序存储、链式存储 、索引存储 和 散列存储。 3.数据运算最常用的有五种,分别是
查找/检索、排序、插入、删除、修改。 4.算法主要有以下五个特性:
输入、输出、可行性、确定性和有穷性。 5.算法分析的
- linux的会话和进程组
网络接口
linux
会话: 一个或多个进程组。起于用户登录,终止于用户退出。此期间所有进程都属于这个会话期。会话首进程:调用setsid创建会话的进程1.规定组长进程不能调用setsid,因为调用setsid后,调用进程会成为新的进程组的组长进程.如何保证? 先调用fork,然后终止父进程,此时由于子进程的进程组ID为父进程的进程组ID,而子进程的ID是重新分配的,所以保证子进程不会是进程组长,从而子进程可以调用se
- 二维数组 元素的连续求解
1140566087
二维数组ACM
import java.util.HashMap;
public class Title {
public static void main(String[] args){
f();
}
// 二位数组的应用
//12、二维数组中,哪一行或哪一列的连续存放的0的个数最多,是几个0。注意,是“连续”。
public static void f(){
- 也谈什么时候Java比C++快
windshome
javaC++
刚打开iteye就看到这个标题“Java什么时候比C++快”,觉得很好笑。
你要比,就比同等水平的基础上的相比,笨蛋写得C代码和C++代码,去和高手写的Java代码比效率,有什么意义呢?
我是写密码算法的,深刻知道算法C和C++实现和Java实现之间的效率差,甚至也比对过C代码和汇编代码的效率差,计算机是个死的东西,再怎么优化,Java也就是和C