目标检测经典论文——YOLOv4论文翻译(纯中文版):YOLOv4: 目标检测最优速度和精度(YOLOv4: Optimal Speed and Accuracy of Object Detecti)
目标检测经典论文翻译汇总:[翻译汇总]
翻译pdf文件下载:[下载地址]
此版为纯中文版,中英文对照版请稳步:[YOLOv4中英文对照版]
YOLOv4: 目标检测最优速度和精度 |
||
| Alexey Bochkovskiy* |
Chien-Yao Wang* Institute of Information Science Academia Sinica, Taiwan |
Hong-Yuan Mark Liao Institute of Information Science Academia Sinica, Taiwan |
摘要
有大量的技巧可以提高卷积神经网络(CNN)的精度。需要在大数据集下对这种技巧的组合进行实际测试,并需要对结果进行理论论证。某些技巧仅在某些模型上使用和专门针对某些问题,或只针对小规模的数据集;而一些技巧,如批处理归一化、残差连接等,适用于大多数的模型、任务和数据集。我们假设这种通用的技巧包括加权残差连接(Weighted-Residual-Connection,WRC)、跨小型批量连接(Cross-Stage-Partial-connection,CSP)、Cross mini-Batch Normalization(CmBN)、自对抗训练(Self-adversarial-training,SAT)和Mish激活函数。我们在本文中使用这些新的技巧:WRC、CSP、CmBN、SAT,Mish-activation,Mosaic data augmentation、CmBN、DropBlock正则化和CIoU损失,以及这些技巧的组合,在MS COCO数据集达到目前最好的结果:43.5%的AP(65.7% AP50),在Tesla V100上速度达到约65FPS。源码见:https://github.com/AlexeyAB/darknet.
1. 引言
大多数基于CNN的目标检测器基本上都仅适用于推荐系统。例如:通过城市摄像头寻找免费停车位,它由精确的慢速模型完成,而汽车碰撞警报需要由快速、低精度模型完成。改善实时目标检测器的精度,使其能够不仅可以用于提示生成推荐系统,也可以用于独立的流程管理和减少人力投入。传统GPU使得目标检测可以以实惠的价格运行。最准确的现代神经网络不是实时运行的,需要大量的训练的GPU与大的mini bacth size。我们通过创建一个CNN来解决这样的问题,在传统的GPU上进行实时操作,而对于这些训练只需要一个传统的GPU。
这研究的主要目的是设计一个可以在生产环境快速运行的目标检测器,并且进行并行计算优化,而不是较低的计算量理论指标(BFLOP)。我们希望所设计的目标易于训练和使用。例如,任何使用传统GPU进行训练和测试的人都可以实现实时、高质量、有说服力的目标检测结果,YOLOv4的结果如图1所示。现将我们的成果总结如下:
1. 我们构建了一个快速、强大的模型,这使得大家都可以使用1080 Ti或2080 Ti GPU来训练一个超快、准确的目标检测器。
2. 我们验证了最先进的Bag-of-Freebies和Bag-of-Specials方法在目标检测训练期间的影响。
3. 我们修改了最先进的方法,使其变得更高效并且适合单GPU训练,包括CBN[89]、PAN[49]、SAM[85]等。
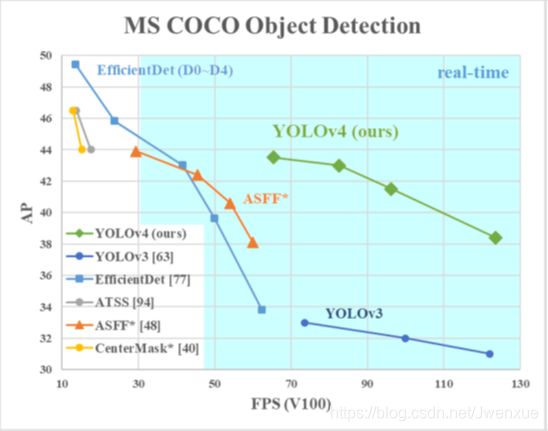
图1:本文提出的YOLOv4和其他先进的目标检测器比较结果。YOLOv4与EfficientDet相比精度差不多相同,但速度比其快两倍。YOLOv3的AP值和FPS都分别提升了10%和12%。
2. 相关工作
2.1. 目标检测模型
现代目标检测器通常由两部分组成:ImageNet上预训练的backbone和用于预测类别和BBOX的检测器head。对于那些在GPU平台上运行的探测器,其backbone可以是VGG[68],ResNet[26]、ResNeXt[86]、或DenseNet [30]。对于那些运行在CPU平台上的检测器形式,它们的backbone可以是SqueezeNet[31]、MobileNet[28,66,27,74],或ShuffleNet[97,53]。至于head部分,它通常被分两类:即一阶段(one-stage)和两阶段(two-stage)的目标检测器。最有代表性的两阶段检测器是R-CNN[19]系列模型,包括Fast R-CNN[18]、Faster R-CNN[64]、R-FCN[9]和Libra R-CNN[58]。也可以在两阶段目标检测器中不用anchor的目标检测器,如RepPoints[87]。对于一阶段检测器来说,最代表性的有YOLO[61、62、63]、SSD[50]和RetinaNet[45]。近几年来,也开发了许多不使用anchor的一阶段目标检测器。这类检测器有CenterNet[13]、CornerNet[37,38]、FCOS[78]等。近年来开发检测器往往会在backbone和head之间插入一些层,这些层用于收集不同阶段的特征图。我们可以称它为检测器的neck。通常情况下neck是由几个自下而上或自上而下的通路(paths)组成。具有这种结构的网络包括Feature Pyramid Network (FPN)[44]、Path Aggregation(PAN)[49]、BiFPN[77]和NAS-FPN[17]。除上述模型外,有的研究者注重于直接重新构建backbone(DetNet[43]、DetNAS[7])或重新构建整个模型(SpineNet[12]、HitDetector[20]),并用于目标检测任务。
总结起来,通常目标检测模型由以下一些部分组成:
- 输入:图像、图像块、图像金字塔
- Backbones:VGG16[68]、ResNet-50[26]、SpineNet[12]、EfficientNet-B0/B7[75]、CSPResNeXt50[81]、CSPDarknet53[81]
- Neck:
-
Additional blocks: SPP [25], ASPP [5], RFB[47], SAM [85]
-
Path-aggregation blocks: FPN [44], PAN [49],NAS-FPN [17], Fully-connected FPN, BiFPN[77], ASFF [48], SFAM [98]
- Heads:
-
Dense Prediction (one-stage):RPN [64], SSD [50], YOLO [61], RetinaNet[45] (anchor based) CornerNet [37], CenterNet [13], MatrixNet[60], FCOS [78] (anchor free)
-
Sparse Prediction (two-stage):Faster R-CNN [64], R-FCN [9], Mask R-CNN [23] (anchor based) RepPoints [87] (anchor free)
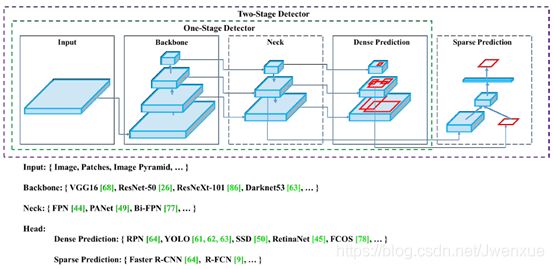
图2:目标检测器。
2.2. Bag of freebies
通常情况下,传统的目标检测器的训练都是在线下进行的。因此,研究者们总是喜欢利用纯下训练的好处而研究更好的训练方法,使得目标检测器在不增加测试成本的情况下达到更好的精度。我们将这些只需改变训练策略或只增加训练成本的方法称为bag of freebies。目标检测经常采用并符合这个定义的就是数据增强。数据增强的目的是增加输入图像的多样性,从而使设计的目标检测模型对来自不同环境的图片具有较高的鲁棒性。比如photometric distortions和geometric distortions是两种常用的数据增强方法,它们对检测任务肯定是有好处的。使用photometric distortions时,我们调整图像的亮度、对比度、色调、饱和度和噪声。使用geometric distortions时,我们对图像添加随机缩放、裁剪、翻转和旋转。
上面提到的数据增强方法都是逐像素的调整,以及调整区域的所有原始像素信息会被保留下来。此外,一些从事数据增强工作的研究者把重点放在了模拟目标遮挡问题上。他们在图像分类和目标检测取得了好的结果。例如,随机擦除[100]和CutOut[11]可以随机的选取图像中的矩形区域,并填充随机值或零的互补值。至于hide-and-seek [69]和grid mask [6],他们随机或均匀地选择图像中的多个矩形区域,并将其全部像素值替换为零值。如果将类似的概念应用到特征图中,就是DropOut[71]、DropConnect[80]和DropBlock[16]方法。此外,有研究者提出了将多张图像放在一起从而实现数据增强的方法。例如,MixUp[92]将两张图像以不同系数的进行相乘和叠加,并根据叠加比例调整标签。对于CutMix[91],它通过覆盖裁剪后的图像到其他图像的矩形区域,并根据混合区的大小调整标签。除了以上提到的方法,网络迁移GAN[15]也常常用于数据增强,这种方法可以有效地减少CNN学习到的纹理偏差。
与上面提出的各种方法不同,其他的一些Bag of freebies方法是专门解决可能有偏差的数据集中语义分布问题。在处理语义分布偏差的问题上,有一个很重要的问题是不同类别之间的数据不平衡,而两阶段检测器处理这个问题通常是通过hard negative example mining [72]或online hard example mining [67]。但example mining method不适用于一阶段的目标检测器,因为这种检测器属于密集预测架构。因此,Linet al.[45]提出了focal loss解决数据不平衡问题。另一个很重要的问题是,one-hot编码很难表达出类与类之间关联程度。这种表示方法(one-hot)通常在打标签的时候使用。在[73]中提出的label smoothing方案是将硬标签转化为软标签进行训练,可以使模型更具有鲁棒性。为了获得更好的软标签,Islam等[33]引入知识蒸馏的概念并用于设计标签细化网络。
最后一个bag of freebies是边界框(BBox)回归的目标函数。检测器通常使用MSE损失函数对BBOX的中心点和宽高进行回归,例如{xcenter, ycenter, w, h},或者是回归预测左上角的点和右下角的点,例如{xtop_left, ytop_left, xbottom_right, ybottom_right}。对于基于anchor的方法,它会估算出对应的偏移量,例如{ x center offset , y center offset , w offset , h offset } and { x top left offset , y top left offset , x bottom right offset , y bottom right offset }。但是,如果要直接估计BBOX每个点的坐标值,就要将这些点作为独立变量,但实际上未考虑对象本身的完整性。为了使这一问题得到更好的解决,一些研究人员最近提出了IoU损失[90],其考虑了预测BBox面积和ground truth BBox面积的覆盖度。IoU损失计算过程将通过计算预测值与真实值的IoU,然后将生成的结果连接成一个整体代码,最终通过计算获得BBox的四个坐标值。因为IOU是一个与尺度无关的表示,它可以解决当传统方法计算{x,y,w,h}的l1或l2损失时,损失会随着尺度增加而增大的问题。最近,一些研究人员不断改善IOU损失。例如GIoU损失[65]除覆盖面积也考虑物体的形状和方向。他们建议找到能同时覆盖预测BBOX和真实值BBox的最小面积BBOX,并使用这个BBox作为分母并取代原先IoU损失的分母。至于DIoU损失[99],它另外还包括考虑物体中心的距离,另一方面CIoU损失[99]同时考虑到重叠面积和中心点之间的距离以及长宽比。CIoU可以在BBox回归问题上获得了更好的收敛速度和精度。
2.3. Bag of specials
对于那些只会增加少量的推理成本的插入模块和后期处理方法,但可显著提高目标检测的准确性,我们称其为“Bag of specials”。一般来说,这些插入模块是用来增强模型的某些属性的,如扩大感受野、引入注意力机制或增强特征整合能力等,而后处理是一种筛选模型预测结果方法。
可用于扩大感受野的常用模块有SPP[25]、ASPP[5]和RFB[47]。SPP模块源于Spatial Pyramid Match(SPM)[39],而SPMs的原始方法是将特征图分割成几个d×d相等大小的块,其中d可以是{1,2,3,…},从而形成空间金字塔,然后提取bag-of-word特征。SPP将SPM集成到CNN并使用max-pooling操作而不是bag-of-word运算。由于He等人提出的SPP模块[25]会输出一维特征向量,因此不可能应用于全卷积网络(FCN)中。因此,在YOLOv3的设计[63]中,Redmon和Farhadi改进了YOLOv3的设计,将SPP模块修改为融合k×k池化核的最大池化输出,其中k = {1,5,9,13},步长等于1。在这种设计下,一个相对较大的k×k有效地增加了backbone的感受野。增加了改进版的SPP模块后,YOLOv3-608在MS COCO上AP50提升了2.7%,但要付出0.5%的额外计算成本。ASPP[5]模块和改进后的SPP模块在操作上的区别是主要由原来的步长1、核大小为k×k的最大池化到几个3×3核的最大池化,缩放比例为k,步长1的空洞卷积。RFB模块是使用几个k×k核的空洞卷积,空洞率为k,步长为1以得到比ASPP更全面的空间覆盖率。RFB[47]只需额外增加7%推理时间却在MS COCO上将SSD的AP50提升5.7%。
在目标检测中经常使用的注意力模块,通常分为channel-wise注意力和point-wise注意力,具有代表性的两个模型分别是Squeeze-and-Excitation (SE) [29]和Spatial Attention Module (SAM) [85]。虽然SE模块可以将ResNet50在ImageNet图像分类任务上的top-1准确率提升1%,而计算量仅仅增加2%,但是在GPU上推理时间通常会增加10%左右,所以更适合用于移动端设备。但对于SAM,它只需要额外0.1%的计算量就可以将ResNet50-SE在ImageNet图像分类任务上的Top-1精度提高0.5%。最重要的是,它完全不会影响GPU上推理的速度。
在特征融合方面,早期的做法是使用快捷连接(skip connection)[51]或超列(hyper-column)[22]将低级物理特征融合成高级语义特征。由于FPN等多尺度预测方法越来越流行,许多集成了不同的特征金字塔特征的轻量级模块被提了出来。这类模块包括SFAM[98]、ASFF[48]和BiFPN[77]。SFAM的主要思想是利用SE模块对多尺度特征图在通道方向上重新加权拼接特征图。至于ASFF,它用softmax进行point-wise水平的重新加权,然后在不同尺度添加特征图。在BiFPN中,多输入加权残差连接进行多尺度水平的重新加权,然后在不同尺度上添加特征图。
在深度学习的研究中,有人注重于寻找好的激活函数。一个好的激活函数可以使梯度更有效地传播,同时也不会造成太多的额外计算成本。2010年,Nair和Hinton [56]提出了ReLU来实质性地解决梯度消失的问题,这也是tanh和sigmoid激活函数经常遇到的问题。随后便提出了LReLU[54]、PReLU[24]、ReLU6[28]、Scaled Exponential Linear Unit (SELU)[35]、Swish[59]、hard-Swish[27]和Mish[55]等,这些激活函数也用来解决梯度消失问题的。LReLU和PReLU的主要目的是为了解决当ReLU输出小于零时梯度为零的问题。至于ReLU6和Hard-Swish,它们是专为量化网络(quantization networks)设计。对于自归一化的神经网络, SELU激活函数的提出满足了这一目的。需要注意的是,Swish和Mish都是连续可微的激活函数。
基于深度学习的目标检测中常用的后处理方法是NMS(非极大值抑制),它可以用于过滤那些对相同目标预测较差的边界框,并且只保留响应较高的候选边界框。NMS努力改进的方式与目标函数的优化方法一致。NMS原始方法没有考虑背景信息,所以Girshick等人[19]在R-CNN中增加了分类置信度分数作为参考,并根据信任分数的顺序,从高分到低分的顺序执行贪婪NMS。至于soft NMS[1],它关注了这样一个问题,即目标遮挡可能会导致基于IoU分数的贪婪NMS的置信度得分降低。基于DIoU的NMS[99]的开发者思路是在soft NMS基础上将中心点距离信息增加到BBox筛选的过程中。值得注意的是,由于上述后处理方法都没有直接涉及指提取特征图,所以在不使用anchor的方法后续开发中不再需要进行后处理。
3. 方法
基本目的是生产系统中神经网络的快速运行速度和并行计算的优化,而不是低计算量理论指标(BFLOP)。我们提出了两种实时神经网络:
- 对于GPU,我们在卷积层使用少量组(1-8):CSPResNeXt50 / CSPDarknet53
- 对于VPU,我们使用分组卷积,但避免使用Squeeze-and-excitement (SE) blocks。具体包括以下模型:EfficientNet-lite / MixNet [76] / GhostNet[21] / MobileNetV3
3.1架构选择
我们的目的是在输入网络分辨率、卷积层数目、参数数量(卷积核2 * 卷积核个数 * 通道数/组数)和每层输出个数(过滤器)之间找到最佳平衡。例如我们的许多研究表明CSPResNext50在ILSVRC2012(ImageNet)数据集上的目标分类效果比CSPDarknet53好很多。然而,CSPDarknet53在MS COCO数据集上的目标检测效果比CSPResNext50更好。
下一个目标是选择额外的blocks以扩大感受野,从不同级别的backbone中选择最佳的参数组合方法以达到不同水平的检测效果,例如FPN、PAN、ASFF、BiFPN。
一个最佳的分类参考模型并不总是最佳的检测器。与分类器相比,检测器需要满足以下几点:
-
更大的输入网络尺寸(分辨率)——用于检测多个小尺寸目标
-
更多的层数——获得更大的感受野以便能适应网络输入尺寸的增加
-
更多参数——获得更大的模型容量以便在单个图像中检测多个大小不同的物体。
我们可以假设选择的backbone模型具有较大的感受野(具有很多3×3卷积层)和大量的参数。表1显示了CSPResNeXt50,CSPDarknet53和EfficientNet B3的相关信息。CSPResNext50仅包含16个3×3卷积层、425×425感受野大小和20.6M个参数,而CSPDarknet53包含29个3×3卷积、725×725感受野大小和27.6M个参数。这种理论上的证明,加上我们大量的实验表明:CSPDarknet53是这两个神经网络中最佳的检测器backbone模型。
表1:图像分类神经网络的参数。

不同大小的感受野的影响总结如下:
- 最大目标尺寸——允许观察到整个目标
- 最大网络尺寸——允许观察到目标周围的上下文
- 超出网络尺寸——增加图像像素点与最终激活值之间的连接数
我们将SPP模块添加到CSPDarknet53上,因为它大大增加了感受野,分离出最重要的context特征,然而几乎不会导致网络运行速度降低。我们使用PANet作为来自不同检测器水平不同backbone的参数组合方法而不是YOLOv3中使用的FPN。
最后,对于YOLOv4架构,我们选择CSPDarknet53为backbone、SPP额外添加模块、PANet path-aggregation为neck、YOLOv3(基于anchor的)为head。
之后,我们将计划大幅扩展Bag of Freebies(BoF)的内容到检测器架构中,这些扩展的模块理论上应该可以解决一些问题并增加检测器准确性,并通过实验的方式按顺序检查每个功能的影响。
我们没有使用跨GPU的批标准化(CGBN或SyncBN)或昂贵的专用设备。这使得任何人都可用常规图形处理器,例如GTX 1080Ti或RTX2080Ti,复现我们最新的成果。
3.2. BoF 和BoS的选择
为了改善目标检测的训练,CNN通常会使用如下方法或结构:
- 激活函数: ReLU、leaky-ReLU、parametric-ReLU、ReLU6、SELU、Swish、Mish
- 边界框损失回归:MSE、IoU、GIoU、CIoU、DIoU
- 数据增强:CutOut、MixUp、CutMix
- 正则化方法:DropOut、DropPath[36]、Spatial DropOut [79]、DropBlock
- 通过均值和方差标准化网络激活函数输出值:Batch Normalization (BN) [32]、Cross-GPU Batch Normalization (CGBN or SyncBN)[93]、Filter Response Normalization (FRN) [70]、Cross-Iteration Batch Normalization (CBN) [89]
- 快捷连接(Skip-connections):残差连接、加权残差连接、多输入加权残差连接、Cross stage partial connections (CSP)
至于训练激活函数,由于PRELU和SELU的训练难度较大,而ReLU6是专门为量化网络而设计的,因此我们从候选列表中删除这几个激活函数。至于正则化方法,发表了DropBlock的人将他们的方法与其他方法进行了细致的比较,他们的正则化方法完胜。因此,我们毫不犹豫地选择了DropBlock作为我们正则化方法。至于归一化(或标准化)方法的选择,由于我们只关注在仅使用一个GPU上的训练策略,因此不会考虑使用syncBN。
3.3 额外的改进
为了使所设计的检测器更适合于在单GPU上进行训练,我们做了如下额外的设计和改进:
- 我们引入了一种新的数据增强方法Mosaic和自对抗训练方法(Self-Adversarial Training,SAT)
- 我们使用遗传算法选择最优超参数
- 我们对现在方法做了一些修改,使得我们的设计更适合于高效的训练和检测——修改的SAM、修改的PAN和Cross mini-Batch Normalization (CmBN).
Mosaic是一个混合了4个训练图像的新的数据增强方法。由于混合了4个不同的contexts,而CutMix只混合了2个输入图像。这使得可以检测到目标正常contexts之外的目标。此外,批标准化从每层上4个不同的图像计算激活值统计数据。这显著地减少了对大batch size的需要。

图3:数据增强的一个新方法马赛克(Mosaic)。
自对抗训练(Self-Adversarial Training,SAT)也是一种新的数据增强技术,以2个前向反向阶段的方式进行操作。在第一个阶段,神经网络改变的是原始图像而不是的网络权重。这样神经网络对其自身进行对抗性攻击,改变原始图像并创造出图像上没有目标的假象。在第2个阶段中,通过正常方式在修改的图像上进行目标检测对神经网络进行训练。
如图4所示,CmBN是CBN的修改版,定义为Cross mini-Batch Normalization(CmBN)。其只收集单个批次内mini-batches之间的统计数据。
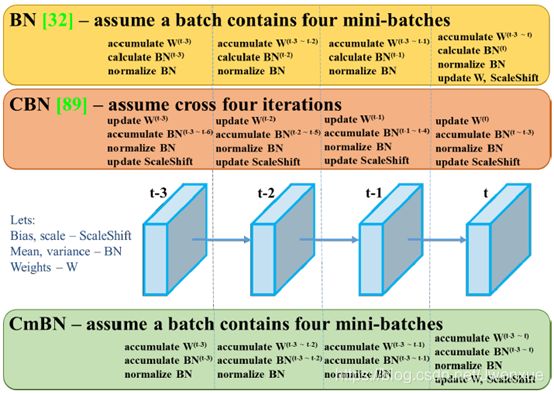
图4:Cross mini-Batch Normalization。
如图5所示,我们将SAM从spatial-wise attention修改为point-wise attention,如图6所示,我们将PAN的快捷连接改为拼接。

图5:修改的SAM。

图6:修改的PAN。
3.4. YOLOv4
本节,我们将详细介绍YOLOv4。
YOLOv4包括:
- Backbone:CSPDarknet53 [81]
- Neck:SPP [25]、PAN [49]
- Head:YOLOv3 [63]
YOLO v4使用:
- Bag of Freebies (BoF) for backbone:CutMix and Mosaic数据增强、DropBlock正则化、Class label smoothing
- Bag of Specials (BoS) for backbone:Mish激活函数、Cross-stage partial connections (CSP)、多输入加权残差连接 (MiWRC)
- Bag of Freebies (BoF) for detector: CIoU损失、CmBN、DropBlock正则化、Mosaic数据增强、自对抗训练、Eliminate grid sensitivity、Using multiple anchors for a single ground truth、Cosine annealing scheduler [52]、优化超参数、Random training shapes
- Bag of Specials (BoS) for detector:Mish激活函数、SPP-block、SAM-block、PAN path-aggregation block、DIoU-NMS
4. 实验
我们测试了不同的训练改进在ImageNet数据集分类任务(ILSVRC 2012年val)和MS COCO(test-dev 2017)数据集检测上的准确性。
4.1实验设置
在ImageNet的图像分类实验中,默认超参数如下:训练步数为8百万次;批大小和mini批大小分别为128和32;polynomial decay learning rate scheduling strategy初始学习率为0.1的多项式衰减调度策略;warm-up步数为1000;动量和衰减权重分别设定为0.9和0.005。我们所有的BoS实验都使用的默认超参数设置,而在BoF实验中,我们增加了额外50%的训练步数。在BoF实验中,我们验证了MixUp、CutMix、Mosaic、Bluring数据增强和标签smoothing正则化方法。在BoS实验中我们比较了LReLU、Swish和Mish激活函数的效果。所有实验都使用用1080Ti或2080 Ti GPU进行了训练。
在MS COCO目标检测实验中,默认参数如下:训练步数为500500;采用初始学习率为0.01的学习率衰减策略,并分别在40万步和45万步时乘以系数0.1。动量和权重衰减分别设置为0.9和0.0005。所有的架构使用单个GPU进行了多尺度训练,批大小为64,mini批大小为8或4,具体取决于模型架构和GPU显存容量限制。除了使用使用遗传算法进行超参数搜索外,所有其他实验均使用默认设置。YOLOv3-SPP使用的遗传算法实验使用GIoU损失进行训练,对min-val 5k数据集进行了300轮的搜索。遗传算法采用搜索学习率为0.00261、动量为0.949,真实值的IoU阈值设置为0.213,损失正则化为0.07。我们也经验证了大量的BoF,包括grid sensitivity elimination、马赛克数据增强、IoU阈值、遗传算法、类别标签smoothing、跨小批量标准化、自对抗训练、cosine annealing scheduler、dynamic mini-batch size、DropBlock、Optimized Anchors、不同类型的IoU损失。我们也对各种BoS进行了实验,包括Mish、SPP、SAM、RFB、BiFPN、BiFPN和Gaussian YOLO[8]。对于所有的实验,我们只使用一个GPU进行了训练,因此诸如syncBN可以优化多GPU训练的技术并没有使用。
4.2. 不同技巧对分类器训练的影响
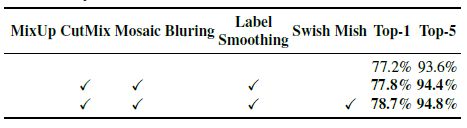
首先,我们研究了不同技巧对分类器训练的影响;具体而言,研究了类别标签smoothing的影响,如图7所示双边模糊(bilateral blurring)、MixUp、CutMix和马赛克等不同数据增强的影响,以及Leaky-ReLU(默认值)、Swish和Mish等不同激活函数的影响。

图7:不同的数据增强方法。
如表2所示,我们的实验引入了以下技巧从而提高了精度,如CutMix和马赛克数据增强、类别标签smoothing和Mish激活函数。因此,我们的分类器训练的BoF-backbone (Bag of Freebies)包括CutMix和Mosaic数据增强、类别标签smoothing。除此之外,如表2和表3所示我们还使用了Mish激活函数作为互补选项。
表2:BoF和Mish对CSPResNeXt-50分类器精度的影响

表3:BoF和Mish对CSPDarknet-53分类器精度的影响
4.3 不同技巧对检测训练的影响
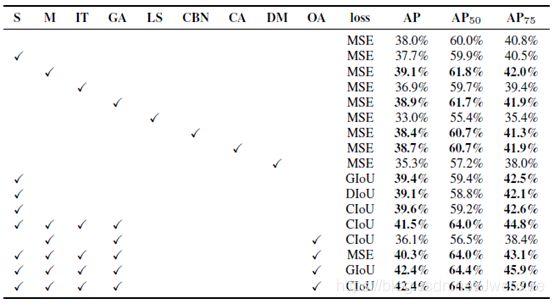
如表4所示,深入研究了不同Bag-of-Freebies (BoF-detector)在检测器训练中的影响。我们通过研究不影响FPS的同时能提升精度的技巧,显著扩展了BOF列表的内容,具体如下:
- S:消除了格子灵敏度,在YOLOv3通过方程bx=σ(tx)+cx, by=σ(ty)+cy计算对象坐标,其中cx和cy始终为整数,因此,当bx值接近cx或cx+1时需要极高的tx绝对值。我们通过将sigmoid乘以超过1.0的因子来解决此问题,从而消除了没有检测到目标格子的影响。
- M:马赛克数据增强——训练时使用4张图像的马赛克结果而不是单张图像
- IT:IoU阈值——针对一个真值边界框使用多个anchor,Iou(真值,anchor)>IoU阈值
- GA:遗传算法——在网络训练最初10%的时间内使用遗传算法筛选最优超参数
- LS:类别标签smoothing——对sigmoid激活函数结果使用类别标签smoothing
- CBN:CmBN——使用Cross mini-Batch Normalization在整个小批量内收集统计数据,而不是在单个mini小批量收集统计数据
- CA:Cosine annealing scheduler——在正弦训练中改变学习率
- DM:Dynamic mini-batch size——采用随机训练形状时,对于小分辨率的输入自动增大mini-batch的大小
- OA:最优化Anchors——使用最优化anchor对512×512的网络分辨率进行训练
- GIoU、CIoU、DIoU、MSE——边界框使用不同的损失算法
表4:Bag-of-Freebies的消融研究(CSPResNeXt50-PANet-SPP,512x512)。
如表5所示,进一步的研究涉及了不同的Bag-of-Specials(BoS-detector)对检测器训练精度的影响,包括PAN、RFB、SAM、Gaussian YOLO(G)和ASFF。在我们的实验中,当使用SPP、PAN和SAM时,检测器获得最佳性能。
表5:对Bag-of-Specials进行消融研究(尺寸512x512)。

4.4 不同backbone和预训练权重对检测器训练的影响
如表6所示,我们进一步研究不同backbone对检测器精度的影响。我们注意到具有最佳的分类精度的模型架构并不总是具有最好的检测精度。
表6:使用不同分类器预训练的权重进行检测器训练(所有模型中所有其它参数都是相同的)。
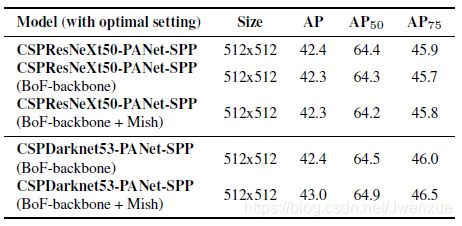
首先,虽然使用不同特征的CSPResNeXt50模型的分类准确率高于 CSPDarknet53模型,但是CSPDarknet53模型在目标检测方面具有更高的精度。
其次,CSPResNeXt50分类器的训练使用BoF和Mish后提高了其分类精度,但将这些预先训练的权重应用到检测器训练时则降低了检测器的精度。然而,CSPDarknet53分类器的训练时使用BoF和Mish均提高了分类器和检测器的精度,检测器使用了分类器预训练的权重。最终的结果是, CSPDarknet53比CSPResNeXt50更适合于做检测器的backbone。
我们观察到,CSPDarknet53模型由于各种改进体现出更大的能力来提高检测器的精度。
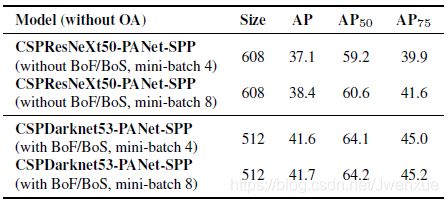
4.5 不同的mini-batch size对检测器训练的影响
最后,我们分析了模型经过不同mini-batch大小的训练的结果,结果图表7所示。从表7所示的结果来看,我们发现训练时加入BoF和BoS后mini-batch大小几乎对检测器性能没有任何影响。这一结果表明,引入BoF和BoS后将不再需要使用昂贵的GPU来进行训练。换句话说,任何人都可以只使用一个传统的GPU来训练一个优秀的检测器。
表7:使用不同mini-batch大小进行检测器训练。
5. 结果
如图8所示为我们的模型与其他最先进的检测器的比较结果。我们的YOLOv4位于帕累托最优曲线上,并且在速度和精度方面都超过最快和最精确的检测器。

图8:不同目标检测器速度和精度的比较。(一些文章指出,它们的检测器的FPS仅基于某一种GPU:Maxwell/Pascal/Volta)。
由于不同的方法在进行推理时间验证的时候使用了不同架构的GPU,我们让YOLOv4运行在Maxwell、Pascal和Volta等常用的GPU上,并与其他最新技术进行了比较。表8列出了使用Maxwell GPU时帧率的比较结果,具体型号可以是GTX Titan X (Maxwell)或Tesla M40 GPU)。表9列出了使用Pascal GPU时帧率的比较结果,具体型号可以是Titan X(Pascal)、Titan Xp、GTX 1080 Ti或Tesla P100 GPU。表10列出使用Volta GPU时帧率的比较结果,具体型号可以是Titan Volta或Tesla V100 GPU。
表8:不同目标检测器在MS COCO数据集上的速度和准确性的比较(test-dev 2017)。(FPS 30或更高的实时检测器突出显示。我们在batch=1、不使用tensorRT的情况下对结果进行了比较。)(译者注:使用Maxwell GPU)
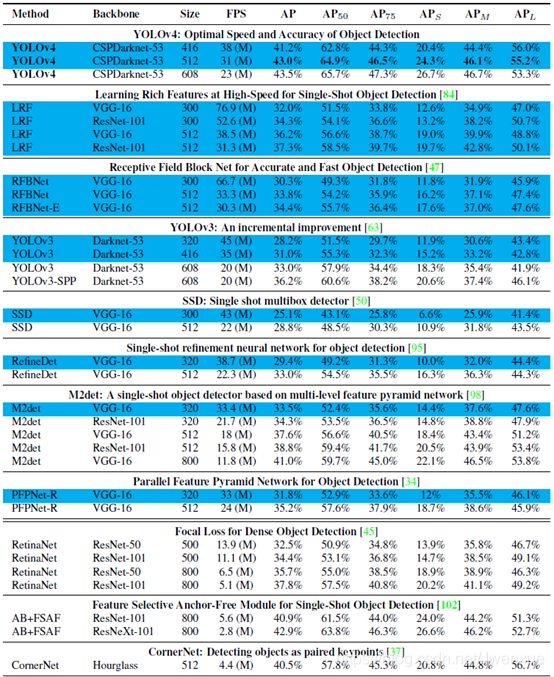
表9:不同目标检测器在MS COCO数据集上的速度和准确性的比较(test-dev 2017)。(FPS 30或更高的实时检测器突出显示。我们在batch=1、不使用tensorRT的情况下对结果进行了比较。)(译者注:使用Pascal GPU)
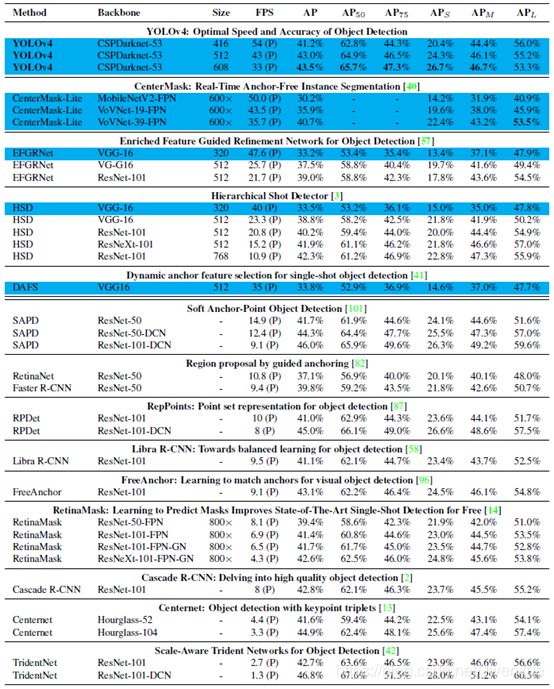
表10:不同目标检测器在MS COCO数据集上的速度和准确性的比较(test-dev 2017)。(FPS 30或更高的实时检测器突出显示。我们在batch=1、不使用tensorRT的情况下对结果进行了比较。)(译者注:使用Volta GPU)

6. 结论
我们提供了一个最先进的检测器,相比于其它所有可用、可替代的检测器其速度更快(FPS)、更准确(MS COCO AP50…95和AP50)。该检测器可以在8-16GB-VRAM的传统GPU上训练和使用,这使得它能够被广泛使用。基于一阶段anchor原始概念的检测测器已经被证实是可行的。我们已经验证了大量方法,并选择使用其中一些方法以提高分类器和检测器的准确性。这些方法可以用作未来研究和开发的最佳实践。
7. 致谢
作者们感谢Glenn Jocher关于马赛克数据增强、使用遗传算法进行超参数筛选和解决格子敏感问题的想法,https://github.com/ ultralytics/yolov3。
参考文献
[1] Navaneeth Bodla, Bharat Singh, Rama Chellappa, and Larry S Davis. Soft-NMS–improving object detection with one line of code. In Proceedings of the IEEE International Conference on Computer Vision (ICCV), pages 5561–5569, 2017. 4
[2] Zhaowei Cai and Nuno Vasconcelos. Cascade R-CNN: Delving into high quality object detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), pages 6154–6162, 2018. 12
[3] Jiale Cao, Yanwei Pang, Jungong Han, and Xuelong Li. Hierarchical shot detector. In Proceedings of the IEEE International Conference on Computer Vision (ICCV), pages 9705–9714, 2019. 12
[4] Ping Chao, Chao-Yang Kao, Yu-Shan Ruan, Chien-Hsiang Huang, and Youn-Long Lin. HarDNet: A low memory traffic network. Proceedings of the IEEE International Conference on Computer Vision (ICCV), 2019. 13
[5] Liang-Chieh Chen, George Papandreou, Iasonas Kokkinos, Kevin Murphy, and Alan L Yuille. DeepLab: Semantic image segmentation with deep convolutional nets, atrous convolution, and fully connected CRFs. IEEE Transactions on Pattern Analysis and Machine Intelligence (TPAMI), 40(4):834–848, 2017. 2, 4
[6] Pengguang Chen. GridMask data augmentation. arXiv preprint arXiv:2001.04086, 2020. 3
[7] Yukang Chen, Tong Yang, Xiangyu Zhang, Gaofeng Meng, Xinyu Xiao, and Jian Sun. DetNAS: Backbone search for object detection. In Advances in Neural Information Processing Systems (NeurIPS), pages 6638–6648, 2019. 2
[8] Jiwoong Choi, Dayoung Chun, Hyun Kim, and Hyuk-Jae Lee. Gaussian YOLOv3: An accurate and fast object detector using localization uncertainty for autonomous driving. In Proceedings of the IEEE International Conference on Computer Vision (ICCV), pages 502–511, 2019. 7
[9] Jifeng Dai, Yi Li, Kaiming He, and Jian Sun. R-FCN: Object detection via region-based fully convolutional networks. In Advances in Neural Information Processing Systems (NIPS), pages 379–387, 2016. 2
[10] Jia Deng, Wei Dong, Richard Socher, Li-Jia Li, Kai Li, and Li Fei-Fei. ImageNet: A large-scale hierarchical image database. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), pages 248–255, 2009. 5
[11] Terrance DeVries and Graham W Taylor. Improved regularization of convolutional neural networks with CutOut. arXiv preprint arXiv:1708.04552, 2017. 3
[12] Xianzhi Du, Tsung-Yi Lin, Pengchong Jin, Golnaz Ghiasi, Mingxing Tan, Yin Cui, Quoc V Le, and Xiaodan Song. SpineNet: Learning scale-permuted backbone for recognition and localization. arXiv preprint arXiv:1912.05027, 2019. 2
[13] Kaiwen Duan, Song Bai, Lingxi Xie, Honggang Qi, Qingming Huang, and Qi Tian. CenterNet: Keypoint triplets for object detection. In Proceedings of the IEEE International Conference on Computer Vision (ICCV), pages 6569–6578, 2019. 2, 12
[14] Cheng-Yang Fu, Mykhailo Shvets, and Alexander C Berg. RetinaMask: Learning to predict masks improves state-of-the-art single-shot detection for free. arXiv preprint arXiv:1901.03353, 2019. 12
[15] Robert Geirhos, Patricia Rubisch, Claudio Michaelis, Matthias Bethge, Felix A Wichmann, and Wieland Brendel. ImageNet-trained cnns are biased towards texture; increasing shape bias improves accuracy and robustness. In International Conference on Learning Representations (ICLR), 2019. 3
[16] Golnaz Ghiasi, Tsung-Yi Lin, and Quoc V Le. DropBlock: A regularization method for convolutional networks. In Advances in Neural Information Processing Systems (NIPS), pages 10727–10737, 2018. 3
[17] Golnaz Ghiasi, Tsung-Yi Lin, and Quoc V Le. NAS-FPN: Learning scalable feature pyramid architecture for object detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), pages 70367045, 2019. 2, 13
[18] Ross Girshick. Fast R-CNN. In Proceedings of the IEEE International Conference on Computer Vision (ICCV), pages 1440–1448, 2015. 2
[19] Ross Girshick, Jeff Donahue, Trevor Darrell, and Jitendra Malik. Rich feature hierarchies for accurate object detection and semantic segmentation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), pages 580–587, 2014. 2, 4
[20] Jianyuan Guo, Kai Han, Yunhe Wang, Chao Zhang, Zhaohui Yang, Han Wu, Xinghao Chen, and Chang Xu. HitDetector: Hierarchical trinity architecture search for object detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2020. 2
[21] Kai Han, Yunhe Wang, Qi Tian, Jianyuan Guo, Chunjing Xu, and Chang Xu. GhostNet: More features from cheap operations. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2020. 5
[22] Bharath Hariharan, Pablo Arbel´aez, Ross Girshick, and Jitendra Malik. Hypercolumns for object segmentation and fine-grained localization. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), pages 447–456, 2015. 4
[23] Kaiming He, Georgia Gkioxari, Piotr Doll´ar, and Ross Girshick. Mask R-CNN. In Proceedings of the IEEE International Conference on Computer Vision (ICCV), pages 2961–2969, 2017. 2
[24] Kaiming He, Xiangyu Zhang, Shaoqing Ren, and Jian Sun. Delving deep into rectifiers: Surpassing human-level performance on ImageNet classification. In Proceedings of the IEEE International Conference on Computer Vision (ICCV), pages 1026–1034, 2015. 4
[25] Kaiming He, Xiangyu Zhang, Shaoqing Ren, and Jian Sun. Spatial pyramid pooling in deep convolutional networks for visual recognition. IEEE Transactions on Pattern Analysis and Machine Intelligence (TPAMI), 37(9):1904–1916, 2015. 2, 4, 7
[26] Kaiming He, Xiangyu Zhang, Shaoqing Ren, and Jian Sun. Deep residual learning for image recognition. In Proceed-ings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), pages 770–778, 2016. 2
[27] Andrew Howard, Mark Sandler, Grace Chu, Liang-Chieh Chen, Bo Chen, Mingxing Tan, Weijun Wang, Yukun Zhu, Ruoming Pang, Vijay Vasudevan, et al. Searching for MobileNetV3. In Proceedings of the IEEE International Conference on Computer Vision (ICCV), 2019. 2, 4
[28] Andrew G Howard, Menglong Zhu, Bo Chen, Dmitry Kalenichenko, Weijun Wang, Tobias Weyand, Marco Andreetto, and Hartwig Adam. MobileNets: Efficient convolutional neural networks for mobile vision applications. arXiv preprint arXiv:1704.04861, 2017. 2, 4
[29] Jie Hu, Li Shen, and Gang Sun. Squeeze-and-excitation networks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), pages 71327141, 2018. 4
[30] Gao Huang, Zhuang Liu, Laurens Van Der Maaten, and Kilian Q Weinberger. Densely connected convolutional networks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), pages 47004708, 2017. 2
[31] Forrest N Iandola, Song Han, Matthew W Moskewicz, Khalid Ashraf, William J Dally, and Kurt Keutzer. SqueezeNet: AlexNet-level accuracy with 50x fewer parameters and¡ 0.5 MB model size. arXiv preprint arXiv:1602.07360, 2016. 2
[32] Sergey Ioffe and Christian Szegedy. Batch normalization: Accelerating deep network training by reducing internal covariate shift. arXiv preprint arXiv:1502.03167, 2015. 6
[33] Md Amirul Islam, Shujon Naha, Mrigank Rochan, Neil Bruce, and Yang Wang. Label refinement network for coarse-to-fine semantic segmentation. arXiv preprint arXiv:1703.00551, 2017. 3
[34] Seung-Wook Kim, Hyong-Keun Kook, Jee-Young Sun, Mun-Cheon Kang, and Sung-Jea Ko. Parallel feature pyramid network for object detection. In Proceedings of the European Conference on Computer Vision (ECCV), pages 234–250, 2018. 11
[35] G¨unter Klambauer, Thomas Unterthiner, Andreas Mayr, and Sepp Hochreiter. Self-normalizing neural networks. In Advances in Neural Information Processing Systems (NIPS), pages 971–980, 2017. 4
[36] Gustav Larsson, Michael Maire, and Gregory Shakhnarovich. FractalNet: Ultra-deep neural networks without residuals. arXiv preprint arXiv:1605.07648, 2016. 6
[37] Hei Law and Jia Deng. CornerNet: Detecting objects as paired keypoints. In Proceedings of the European Conference on Computer Vision (ECCV), pages 734–750, 2018. 2, 11
[38] Hei Law, Yun Teng, Olga Russakovsky, and Jia Deng. CornerNet-Lite: Efficient keypoint based object detection. arXiv preprint arXiv:1904.08900, 2019. 2
[39] Svetlana Lazebnik, Cordelia Schmid, and Jean Ponce. Beyond bags of features: Spatial pyramid matching for recognizing natural scene categories. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), volume 2, pages 2169–2178. IEEE, 2006. 4
[40] Youngwan Lee and Jongyoul Park. CenterMask: Real-time anchor-free instance segmentation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2020. 12, 13
[41] Shuai Li, Lingxiao Yang, Jianqiang Huang, Xian-Sheng Hua, and Lei Zhang. Dynamic anchor feature selection for single-shot object detection. In Proceedings of the IEEE International Conference on Computer Vision (ICCV), pages 6609–6618, 2019. 12
[42] Yanghao Li, Yuntao Chen, Naiyan Wang, and Zhaoxiang Zhang. Scale-aware trident networks for object detection. In Proceedings of the IEEE International Conference on Computer Vision (ICCV), pages 6054–6063, 2019. 12
[43] Zeming Li, Chao Peng, Gang Yu, Xiangyu Zhang, Yangdong Deng, and Jian Sun. DetNet: Design backbone for object detection. In Proceedings of the European Conference on Computer Vision (ECCV), pages 334–350, 2018. 2
[44] Tsung-Yi Lin, Piotr Doll´ar, Ross Girshick, Kaiming He, Bharath Hariharan, and Serge Belongie. Feature pyramid networks for object detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), pages 2117–2125, 2017. 2
[45] Tsung-Yi Lin, Priya Goyal, Ross Girshick, Kaiming He, and Piotr Doll´ar. Focal loss for dense object detection. In Proceedings of the IEEE International Conference on Computer Vision (ICCV), pages 2980–2988, 2017. 2, 3, 11, 13
[46] Tsung-Yi Lin, Michael Maire, Serge Belongie, James Hays, Pietro Perona, Deva Ramanan, Piotr Doll´ar, and C Lawrence Zitnick. Microsoft COCO: Common objects in context. In Proceedings of the European Conference on Computer Vision (ECCV), pages 740–755, 2014. 5
[47] Songtao Liu, Di Huang, et al. Receptive field block net for accurate and fast object detection. In Proceedings of the European Conference on Computer Vision (ECCV), pages 385–400, 2018. 2, 4, 11
[48] Songtao Liu, Di Huang, and Yunhong Wang. Learning spatial fusion for single-shot object detection. arXiv preprint arXiv:1911.09516, 2019. 2, 4, 13
[49] Shu Liu, Lu Qi, Haifang Qin, Jianping Shi, and Jiaya Jia. Path aggregation network for instance segmentation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), pages 8759–8768, 2018. 1, 2, 7
[50] Wei Liu, Dragomir Anguelov, Dumitru Erhan, Christian Szegedy, Scott Reed, Cheng-Yang Fu, and Alexander C Berg. SSD: Single shot multibox detector. In Proceedings of the European Conference on Computer Vision (ECCV), pages 21–37, 2016. 2, 11
[51] Jonathan Long, Evan Shelhamer, and Trevor Darrell. Fully convolutional networks for semantic segmentation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), pages 3431–3440, 2015. 4
[52] Ilya Loshchilov and Frank Hutter. SGDR: Stochastic gradient descent with warm restarts. arXiv preprint arXiv:1608.03983, 2016. 7
[53] Ningning Ma, Xiangyu Zhang, Hai-Tao Zheng, and Jian Sun. ShuffleNetV2: Practical guidelines for efficient cnn architecture design. In Proceedings of the European Conference on Computer Vision (ECCV), pages 116–131, 2018. 2
[54] Andrew L Maas, Awni Y Hannun, and Andrew Y Ng. Rectifier nonlinearities improve neural network acoustic models. In Proceedings of International Conference on Machine Learning (ICML), volume 30, page 3, 2013. 4
[55] Diganta Misra. Mish: A self regularized nonmonotonic neural activation function. arXiv preprint arXiv:1908.08681, 2019. 4
[56] Vinod Nair and Geoffrey E Hinton. Rectified linear units improve restricted boltzmann machines. In Proceedings of International Conference on Machine Learning (ICML), pages 807–814, 2010. 4
[57] Jing Nie, Rao Muhammad Anwer, Hisham Cholakkal, Fahad Shahbaz Khan, Yanwei Pang, and Ling Shao. Enriched feature guided refinement network for object detection. In Proceedings of the IEEE International Conference on Computer Vision (ICCV), pages 9537–9546, 2019. 12
[58] Jiangmiao Pang, Kai Chen, Jianping Shi, Huajun Feng, Wanli Ouyang, and Dahua Lin. Libra R-CNN: Towards balanced learning for object detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), pages 821–830, 2019. 2, 12
[59] Prajit Ramachandran, Barret Zoph, and Quoc V Le. Searching for activation functions. arXiv preprint arXiv:1710.05941, 2017. 4
[60] Abdullah Rashwan, Agastya Kalra, and Pascal Poupart. Matrix Nets: A new deep architecture for object detection. In Proceedings of the IEEE International Conference on Computer Vision Workshop (ICCV Workshop), pages 0–0, 2019. 2
[61] Joseph Redmon, Santosh Divvala, Ross Girshick, and Ali Farhadi. You only look once: Unified, real-time object detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), pages 779788, 2016. 2
[62] Joseph Redmon and Ali Farhadi. YOLO9000: better, faster, stronger. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), pages 72637271, 2017. 2
[63] Joseph Redmon and Ali Farhadi. YOLOv3: An incremental improvement. arXiv preprint arXiv:1804.02767, 2018. 2, 4, 7, 11
[64] Shaoqing Ren, Kaiming He, Ross Girshick, and Jian Sun. Faster R-CNN: Towards real-time object detection with region proposal networks. In Advances in Neural Information Processing Systems (NIPS), pages 91–99, 2015. 2
[65] Hamid Rezatofighi, Nathan Tsoi, JunYoung Gwak, Amir Sadeghian, Ian Reid, and Silvio Savarese. Generalized intersection over union: A metric and a loss for bounding box regression. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), pages 658–666, 2019. 3
[66] Mark Sandler, Andrew Howard, Menglong Zhu, Andrey Zhmoginov, and Liang-Chieh Chen. MobileNetV2: Inverted residuals and linear bottlenecks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), pages 4510–4520, 2018. 2
[67] Abhinav Shrivastava, Abhinav Gupta, and Ross Girshick. Training region-based object detectors with online hard example mining. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), pages 761–769, 2016. 3
[68] Karen Simonyan and Andrew Zisserman. Very deep convolutional networks for large-scale image recognition. arXiv preprint arXiv:1409.1556, 2014. 2
[69] Krishna Kumar Singh, Hao Yu, Aron Sarmasi, Gautam Pradeep, and Yong Jae Lee. Hide-and-Seek: A data augmentation technique for weakly-supervised localization and beyond. arXiv preprint arXiv:1811.02545, 2018. 3
[70] Saurabh Singh and Shankar Krishnan. Filter response normalization layer: Eliminating batch dependence in the training of deep neural networks. arXiv preprint arXiv:1911.09737, 2019. 6
[71] Nitish Srivastava, Geoffrey Hinton, Alex Krizhevsky, Ilya Sutskever, and Ruslan Salakhutdinov. DropOut: A simple way to prevent neural networks from overfitting. The journal of machine learning research, 15(1):1929–1958, 2014. 3
[72] K-K Sung and Tomaso Poggio. Example-based learning for view-based human face detection. IEEE Transactions on Pattern Analysis and Machine Intelligence (TPAMI), 20(1):39–51, 1998. 3
[73] Christian Szegedy, Vincent Vanhoucke, Sergey Ioffe, Jon Shlens, and Zbigniew Wojna. Rethinking the inception architecture for computer vision. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), pages 2818–2826, 2016. 3
[74] Mingxing Tan, Bo Chen, Ruoming Pang, Vijay Vasudevan, Mark Sandler, Andrew Howard, and Quoc V Le. MNASnet: Platform-aware neural architecture search for mobile. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), pages 2820–2828, 2019. 2
[75] Mingxing Tan and Quoc V Le. EfficientNet: Rethinking model scaling for convolutional neural networks. In Proceedings of International Conference on Machine Learning (ICML), 2019. 2
[76] Mingxing Tan and Quoc V Le. MixNet: Mixed depthwise convolutional kernels. In Proceedings of the British Machine Vision Conference (BMVC), 2019. 5
[77] Mingxing Tan, Ruoming Pang, and Quoc V Le. EfficientDet: Scalable and efficient object detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2020. 2, 4, 13
[78] Zhi Tian, Chunhua Shen, Hao Chen, and Tong He. FCOS: Fully convolutional one-stage object detection. In Proceedings of the IEEE International Conference on Computer Vision (ICCV), pages 9627–9636, 2019. 2
[79] Jonathan Tompson, Ross Goroshin, Arjun Jain, Yann LeCun, and Christoph Bregler. Efficient object localization using convolutional networks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), pages 648–656, 2015. 6
[80] Li Wan, Matthew Zeiler, Sixin Zhang, Yann Le Cun, and Rob Fergus. Regularization of neural networks using DropConnect. In Proceedings of International Conference on Machine Learning (ICML), pages 1058–1066, 2013. 3
[81] Chien-Yao Wang, Hong-Yuan Mark Liao, Yueh-Hua Wu, Ping-Yang Chen, Jun-Wei Hsieh, and I-Hau Yeh. CSPNet: A new backbone that can enhance learning capability of cnn. Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition Workshop (CVPR Workshop), 2020. 2, 7
[82] Jiaqi Wang, Kai Chen, Shuo Yang, Chen Change Loy, and Dahua Lin. Region proposal by guided anchoring. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), pages 2965–2974, 2019. 12
[83] Shaoru Wang, Yongchao Gong, Junliang Xing, Lichao Huang, Chang Huang, and Weiming Hu. RDSNet: A new deep architecture for reciprocal object detection and instance segmentation. arXiv preprint arXiv:1912.05070, 2019. 13
[84] Tiancai Wang, Rao Muhammad Anwer, Hisham Cholakkal, Fahad Shahbaz Khan, Yanwei Pang, and Ling Shao. Learning rich features at high-speed for single-shot object detection. In Proceedings of the IEEE International Conference on Computer Vision (ICCV), pages 1971–1980, 2019. 11
[85] Sanghyun Woo, Jongchan Park, Joon-Young Lee, and In So Kweon. CBAM: Convolutional block attention module. In Proceedings of the European Conference on Computer Vision (ECCV), pages 3–19, 2018. 1, 2, 4
[86] Saining Xie, Ross Girshick, Piotr Doll´ar, Zhuowen Tu, and Kaiming He. Aggregated residual transformations for deep neural networks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), pages 1492–1500, 2017. 2
[87] Ze Yang, Shaohui Liu, Han Hu, Liwei Wang, and Stephen Lin. RepPoints: Point set representation for object detection. In Proceedings of the IEEE International Conference on Computer Vision (ICCV), pages 9657–9666, 2019. 2, 12
[88] Lewei Yao, Hang Xu, Wei Zhang, Xiaodan Liang, and Zhenguo Li. SM-NAS: Structural-to-modular neural architecture search for object detection. In Proceedings of the AAAI Conference on Artificial Intelligence (AAAI), 2020. 13
[89] Zhuliang Yao, Yue Cao, Shuxin Zheng, Gao Huang, and Stephen Lin. Cross-iteration batch normalization. arXiv preprint arXiv:2002.05712, 2020. 1, 6
[90] Jiahui Yu, Yuning Jiang, Zhangyang Wang, Zhimin Cao, and Thomas Huang. UnitBox: An advanced object detection network. In Proceedings of the 24th ACM international conference on Multimedia, pages 516–520, 2016. 3
[91] Sangdoo Yun, Dongyoon Han, Seong Joon Oh, Sanghyuk Chun, Junsuk Choe, and Youngjoon Yoo. CutMix: Regularization strategy to train strong classifiers with localizable features. In Proceedings of the IEEE International Conference on Computer Vision (ICCV), pages 6023–6032, 2019. 3
[92] Hongyi Zhang, Moustapha Cisse, Yann N Dauphin, and David Lopez-Paz. MixUp: Beyond empirical risk minimization. arXiv preprint arXiv:1710.09412, 2017. 3
[93] Hang Zhang, Kristin Dana, Jianping Shi, Zhongyue Zhang, Xiaogang Wang, Ambrish Tyagi, and Amit Agrawal. Context encoding for semantic segmentation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), pages 7151–7160, 2018. 6
[94] Shifeng Zhang, Cheng Chi, Yongqiang Yao, Zhen Lei, and Stan Z Li. Bridging the gap between anchor-based and anchor-free detection via adaptive training sample selection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2020. 13
[95] Shifeng Zhang, Longyin Wen, Xiao Bian, Zhen Lei, and Stan Z Li. Single-shot refinement neural network for object detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), pages 4203–4212, 2018. 11
[96] Xiaosong Zhang, Fang Wan, Chang Liu, Rongrong Ji, and Qixiang Ye. FreeAnchor: Learning to match anchors for visual object detection. In Advances in Neural Information Processing Systems (NeurIPS), 2019. 12
[97] Xiangyu Zhang, Xinyu Zhou, Mengxiao Lin, and Jian Sun. ShuffleNet: An extremely efficient convolutional neural network for mobile devices. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), pages 6848–6856, 2018. 2
[98] Qijie Zhao, Tao Sheng, Yongtao Wang, Zhi Tang, Ying Chen, Ling Cai, and Haibin Ling. M2det: A single-shot object detector based on multi-level feature pyramid network. In Proceedings of the AAAI Conference on Artificial Intelligence (AAAI), volume 33, pages 9259–9266, 2019. 2, 4, 11
[99] Zhaohui Zheng, Ping Wang, Wei Liu, Jinze Li, Rongguang Ye, and Dongwei Ren. Distance-IoU Loss: Faster and better learning for bounding box regression. In Proceedings of the AAAI Conference on Artificial Intelligence (AAAI), 2020. 3, 4
[100] Zhun Zhong, Liang Zheng, Guoliang Kang, Shaozi Li, and Yi Yang. Random erasing data augmentation. arXiv preprint arXiv:1708.04896, 2017. 3
[101] Chenchen Zhu, Fangyi Chen, Zhiqiang Shen, and Marios Savvides. Soft anchor-point object detection. arXiv preprint arXiv:1911.12448, 2019. 12
[102] Chenchen Zhu, Yihui He, and Marios Savvides. Feature selective anchor-free module for single-shot object detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), pages 840–849, 2019. 11