现代控制工程(三)状态方程的解
文章目录
- 非齐次状态方程的解——控制工程的受控运动
- 直接法
- 拉氏变换法
- 例题1
- 例题2
- 线性时变系统的运动分析
- 线性时变齐次状态方程的解
- 状态转移矩阵的计算-级数近似法
- 例题:
- 例题
- 线性时变齐次状态方程的解
- 例题
非齐次状态方程的解——控制工程的受控运动
当线性定常系统
{ x ˙ = A x + B u y = C x + D u , x ( t 0 ) = x ( 0 ) \left\{\begin{matrix} \dot x=Ax+Bu\\ y=Cx+Du \end{matrix}\right. ,x(t_0)=x(0) {x˙=Ax+Buy=Cx+Du,x(t0)=x(0)的外加输入函数 u ( t ) ≠ 0 u(t)\neq 0 u(t)̸=0时, u ( t ) u(t) u(t)作用下的运动称为可控系统的受控运动。此时状态方程为非齐次矩阵微分方程,即
x ˙ = A x + B u , x ( t ) ∣ t = t 0 = x ( t 0 ) , B ≠ 0 \dot x=Ax+Bu,x(t)|_{t=t_0}=x(t_0),B\neq 0 x˙=Ax+Bu,x(t)∣t=t0=x(t0),B̸=0
式中,x为n维状态向量,u为r维输入向量,A为n*n常系数矩阵,B为n*r常系数矩阵。
求解非齐次状态方程的方法和求解齐次状态方程的方法一致,即 直接法和 拉氏变换法。
直接法
直接法就是按照常数方程求解微分方程的办法来。
改写方程形式为:
x ˙ − A x = B u \dot x-Ax=Bu x˙−Ax=Bu
上式两边同时左乘 e − A t e^{-At} e−At得:
e − A t [ x ˙ − A x ] = e − A t B u e^{-At}[\dot x-Ax]=e^{-At}Bu e−At[x˙−Ax]=e−AtBu
d d t [ e − A t x ] = e − A t B u \frac {\mathrm{d}} {\mathrm{d}t} [e^{-At}x]=e^{-At}Bu dtd[e−Atx]=e−AtBu
对两边的式子进行积分,
∫ t 0 t d d τ [ e − A τ x ( τ ) ] d τ = ∫ t 0 t e − A τ B u ( τ ) d τ \int_{t_0}^{t}\frac {\mathrm{d}} {\mathrm{d}\tau} [e^{-A\tau}x(\tau)] \mathrm{d}\tau=\int_{t_0}^{t} e^{-A\tau}Bu(\tau) \mathrm{d}\tau ∫t0tdτd[e−Aτx(τ)]dτ=∫t0te−AτBu(τ)dτ
可得: e − A t x ( t ) − e − A t 0 x ( t 0 ) = ∫ t 0 t e − A τ B u ( τ ) d τ e^{-At}x(t)-e^{-At_0}x(t_0)=\int_{t_0}^{t} e^{-A\tau}Bu(\tau) \mathrm{d}\tau e−Atx(t)−e−At0x(t0)=∫t0te−AτBu(τ)dτ
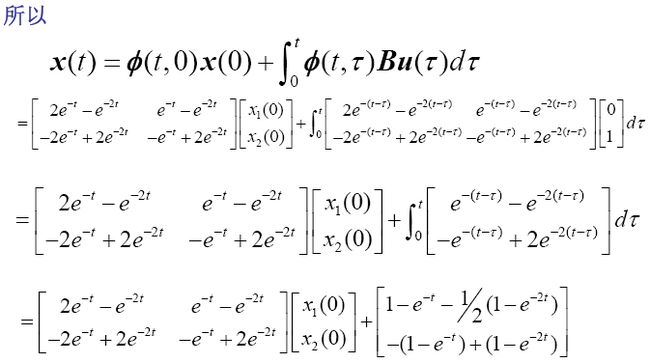
所以: x ( t ) = e A ( t − t 0 ) x ( t 0 ) + ∫ t 0 t e A ( t − τ ) B u ( τ ) d τ x(t)=e^{A(t-t_0)}x(t_0)+\int_{t_0}^{t} e^{A(t-\tau)}Bu(\tau) \mathrm{d}\tau x(t)=eA(t−t0)x(t0)+∫t0teA(t−τ)Bu(τ)dτ
用状态转移矩阵表示为:
x ( t ) = ϕ ( t , t 0 ) x ( t 0 ) + ∫ t 0 t ϕ ( t , τ ) B u ( τ ) d τ x(t)=\phi(t,t_0) x(t_0)+\int_{t_0}^{t} \phi(t,\tau)Bu(\tau) \mathrm{d}\tau x(t)=ϕ(t,t0)x(t0)+∫t0tϕ(t,τ)Bu(τ)dτ
等式右边是两项相加,前一项是初始状态引起的响应,即零输入响应。后一项是输入引起的响应,零状态响应。
上式表明非齐次状态方程的解包含两部分:
①由初始状态引起的状态转移分量,这是自由运动结果;
②由控制作用引起的受控分量,它是受控运动(或称强迫运动)的结果。
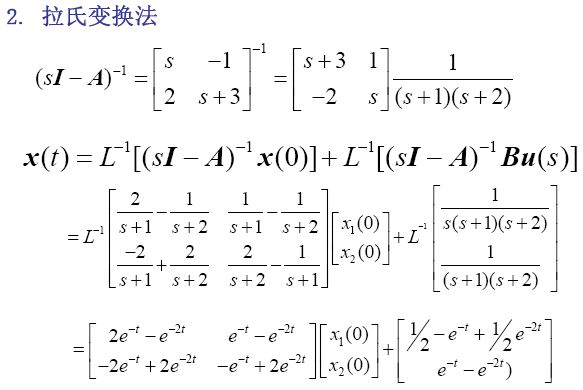
拉氏变换法
对齐次状态方程组两边进行拉氏变换得:
s X ( s ) − X ( 0 ) = A X ( s ) + B U ( s ) sX(s)-X(0)=AX(s)+BU(s) sX(s)−X(0)=AX(s)+BU(s)
⇒ ( s I − A ) X ( s ) = X ( 0 ) + B U ( s ) \Rightarrow (sI-A)X(s)=X(0)+BU(s) ⇒(sI−A)X(s)=X(0)+BU(s)
⇒ X ( s ) = ( s I − A ) − 1 X ( 0 ) + ( s I − A ) − 1 B U ( s ) \Rightarrow X(s)=(sI-A)^{-1}X(0)+(sI-A)^{-1}BU(s) ⇒X(s)=(sI−A)−1X(0)+(sI−A)−1BU(s)
再进行拉式反变换得:
x ( t ) = L − 1 [ ( s I − A ) − 1 ] x ( 0 ) + L − 1 [ ( s I − A ) − 1 B U ( s ) ] x(t)=L^{-1}[(sI-A)^{-1}]x(0)+L^{-1}[(sI-A)^{-1}BU(s)] x(t)=L−1[(sI−A)−1]x(0)+L−1[(sI−A)−1BU(s)]
由方程解的唯一性(直接法和拉式变换法的结果是一致的)可得到:
e A ( t − t 0 ) = L − 1 [ ( s I − A ) − 1 ] e^{A(t-t_0)}=L^{-1}[(sI-A)^{-1}] eA(t−t0)=L−1[(sI−A)−1]
∫ t 0 t ϕ ( t , τ ) B u ( τ ) d τ = L − 1 [ ( s I − A ) − 1 B U ( s ) ] \int_{t_0}^{t} \phi(t,\tau)Bu(\tau) \mathrm{d}\tau=L^{-1}[(sI-A)^{-1}BU(s)] ∫t0tϕ(t,τ)Bu(τ)dτ=L−1[(sI−A)−1BU(s)]
若 y ( t ) = C x ( t ) + D u ( t ) y(t)=Cx(t)+Du(t) y(t)=Cx(t)+Du(t),并且初始时刻为 t 0 t_0 t0
则输出为:
y ( t ) = C e A ( t − t 0 ) x ( t 0 ) + C ∫ t 0 t ϕ ( t , τ ) B u ( τ ) d τ + D u ( t ) y(t)=Ce^{A(t-t_0)}x(t_0)+C\int_{t_0}^{t} \phi(t,\tau)Bu(\tau) \mathrm{d}\tau+Du(t) y(t)=CeA(t−t0)x(t0)+C∫t0tϕ(t,τ)Bu(τ)dτ+Du(t)
例题1

这里可以有多种方法求矩阵指数函数,包括定义法根据级数求以及拉式变换法等方法,见 https://blog.csdn.net/weijifen000/article/details/83099396#_58 。
例题2


对于典型输入信号,如单位脉冲、单位阶跃、单位速度等信号作用下,系统的响应(即非齐次状态方程的解)有以下表达式:
- 单位冲激信号 u ( t ) = δ ( t ) u(t)=\delta (t) u(t)=δ(t):
x ( t ) = e A t x ( 0 ) + e A t B x(t)=e^{At}x(0)+e^{At}B x(t)=eAtx(0)+eAtB - 单位阶跃信号 u ( t ) = 1 ( t ) u(t)=1(t) u(t)=1(t):
x ( t ) = e A t x ( 0 ) + e A t B x(t)=e^{At}x(0)+e^{At}B x(t)=eAtx(0)+eAtB - 速度信号 u ( t ) = t u(t)=t u(t)=t:
x ( t ) = e A t x ( 0 ) + [ A − 2 ( e A t − I ) − A − 1 t ] B x(t)=e^{At}x(0)+[A^{-2}(e^{At}-I)-A^{-1}t]B x(t)=eAtx(0)+[A−2(eAt−I)−A−1t]B
线性时变系统的运动分析
即系统随着时间变化。
线性时变系统方程为:
{ x ˙ ( t ) = A ( t ) x ( t ) + B ( t ) u ( t ) y ( t ) = C ( t ) x ( t ) + D ( t ) u ( t ) \left\{\begin{matrix} \dot x(t)=A(t)x(t)+B(t)u(t)\\ y(t)=C(t)x(t)+D(t)u(t) \end{matrix}\right. {x˙(t)=A(t)x(t)+B(t)u(t)y(t)=C(t)x(t)+D(t)u(t)
如果 A ( t ) , B ( t ) , C ( t ) A(t),B(t),C(t) A(t),B(t),C(t)的所有元素在时间区间 [ t 0 , + ∞ ] [t_0,+\infty] [t0,+∞]上均是连续函数,则对于任意初始状态 x ( t 0 ) x(t_0) x(t0)和输入向量 u ( t ) u(t) u(t),系统状态方程的解存在并且唯一。
线性时变齐次状态方程的解
线性时变齐次状态方程 x ˙ ( t ) = A ( t ) x ( t ) \dot x(t)=A(t)x(t) x˙(t)=A(t)x(t)
其解为: x ( t ) = ϕ ( t , t 0 ) x ( t 0 ) x(t)=\phi(t,t_0)x(t_0) x(t)=ϕ(t,t0)x(t0)
ϕ ( t , t 0 ) \phi(t,t_0) ϕ(t,t0)为状态转移矩阵,具有以下性质:
- 满足其状态方程本身,即将线性时变齐次状态方程的解带入得到:
d d t ϕ ( t , t 0 ) = A ( t ) ϕ ( t , t 0 ) \frac {\mathrm{d}} {\mathrm{d}t} \phi(t,t_0)=A(t)\phi(t,t_0) dtdϕ(t,t0)=A(t)ϕ(t,t0)
且初始条件 ϕ ( t 0 , t 0 ) = I \phi(t_0,t_0)=I ϕ(t0,t0)=I - 可逆性:
ϕ − 1 ( t , t 0 ) = ϕ ( t 0 , t ) \phi ^{-1}(t,t_0)=\phi (t_0,t) ϕ−1(t,t0)=ϕ(t0,t) - 传递性:
ϕ ( t 2 , t 1 ) ϕ ( t 1 , t 0 ) = ϕ ( t 2 , t 0 ) \phi (t_2,t_1)\phi (t_1,t_0)=\phi (t_2,t_0) ϕ(t2,t1)ϕ(t1,t0)=ϕ(t2,t0) - ϕ ( t , τ ) \phi(t,\tau) ϕ(t,τ)对第二变元 τ \tau τ的偏导数为
d d t ϕ ( t , τ ) = − ϕ ( t , τ ) A ( τ ) \frac {\mathrm{d}} {\mathrm{d}t} \phi(t,\tau)=-\phi(t,\tau)A(\tau) dtdϕ(t,τ)=−ϕ(t,τ)A(τ)
状态转移矩阵的计算-级数近似法
ϕ ( t , t 0 ) = e ∫ t 0 t A ( τ ) d τ = I + ∫ t 0 t A ( τ 0 ) d τ 0 + ∫ t 0 t A ( τ 0 ) ∫ t 0 τ 0 A ( τ 1 ) d τ 1 d τ 0 + ∫ t 0 t A ( τ 0 ) ∫ t 0 τ 0 A ( τ 1 ) ∫ t 2 τ 0 A ( τ 2 ) d τ 2 d τ 1 d τ 0 + ⋯ \phi(t,t_0)=e^{\int _{t_0}^{t}A(\tau){\mathrm{d}\tau} }\\ =I+\int _{t_0}^{t}A(\tau_0){\mathrm{d}\tau_0}+ \int _{t_0}^{t}A(\tau_0)\int _{t_0}^{\tau_0}A(\tau_1){\mathrm{d}\tau_1}{\mathrm{d}\tau_0}\\+\int _{t_0}^{t}A(\tau_0)\int _{t_0}^{\tau_0}A(\tau_1)\int _{t_2}^{\tau_0}A(\tau_2){\mathrm{d}\tau_2}{\mathrm{d}\tau_1}{\mathrm{d}\tau_0}+\cdots ϕ(t,t0)=e∫t0tA(τ)dτ=I+∫t0tA(τ0)dτ0+∫t0tA(τ0)∫t0τ0A(τ1)dτ1dτ0+∫t0tA(τ0)∫t0τ0A(τ1)∫t2τ0A(τ2)dτ2dτ1dτ0+⋯
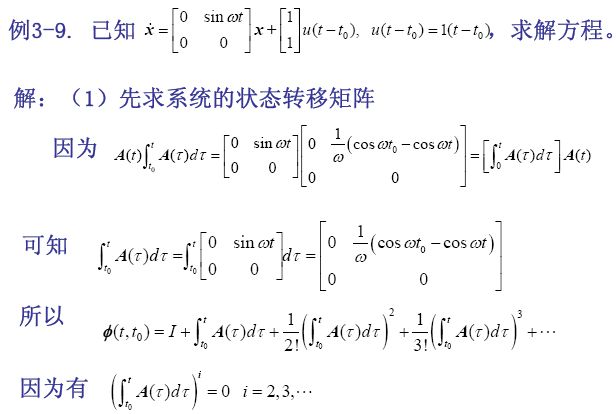
例题:



当满足可交换条件时,时变系统状态转移矩阵的解可以表示为:
ϕ ( t , t 0 ) = e ∫ t 0 t A ( τ ) d τ \phi(t,t_0)=e^{\int_{t_0}^t A(\tau) {\mathrm{d}\tau}} ϕ(t,t0)=e∫t0tA(τ)dτ
例题


线性时变齐次状态方程的解
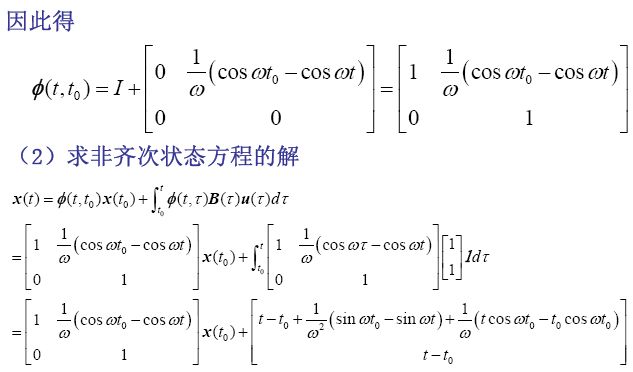
对于线性时变非齐次状态方程:
x ˙ = A ( t ) x + B ( t ) u , x ( t ) ∣ t = 0 = x ( t 0 ) \dot x=A(t)x+B(t)u,x(t)|_{t=0}=x(t_0) x˙=A(t)x+B(t)u,x(t)∣t=0=x(t0)
其解为:
x ( t ) = ϕ ( t , t 0 ) x ( t 0 ) + ∫ t 0 t ϕ ( t , τ ) B ( τ ) u ( τ ) d τ x(t)=\phi(t,t_0)x(t_0)+\int_{t_0}^t \phi(t,\tau)B(\tau)u(\tau){\mathrm{d}}\tau x(t)=ϕ(t,t0)x(t0)+∫t0tϕ(t,τ)B(τ)u(τ)dτ
或:
x ( t ) = ϕ ( t , t 0 ) [ x ( t 0 ) + ∫ t 0 t ϕ ( t , τ ) B ( τ ) u ( τ ) d τ ] x(t)=\phi(t,t_0)[x(t_0)+\int_{t_0}^t \phi(t,\tau)B(\tau)u(\tau){\mathrm{d}}\tau] x(t)=ϕ(t,t0)[x(t0)+∫t0tϕ(t,τ)B(τ)u(τ)dτ]
系统输出为:
y ( t ) = C ( t ) ϕ ( t , t 0 ) x ( t 0 ) + C ( t ) ∫ t 0 t ϕ ( t , τ ) B ( τ ) u ( τ ) d τ + D ( t ) u ( t ) y(t)=C(t)\phi(t,t_0)x(t_0)+C(t)\int_{t_0}^t \phi(t,\tau)B(\tau)u(\tau){\mathrm{d}}\tau+D(t)u(t) y(t)=C(t)ϕ(t,t0)x(t0)+C(t)∫t0tϕ(t,τ)B(τ)u(τ)dτ+D(t)u(t)
或:
y ( t ) = C ( t ) ϕ ( t , t 0 ) [ x ( t 0 ) + ∫ t 0 t ϕ ( t , τ ) B ( τ ) u ( τ ) d τ ] + D ( t ) u ( t ) y(t)=C(t)\phi(t,t_0)[x(t_0)+\int_{t_0}^t \phi(t,\tau)B(\tau)u(\tau){\mathrm{d}}\tau]+D(t)u(t) y(t)=C(t)ϕ(t,t0)[x(t0)+∫t0tϕ(t,τ)B(τ)u(τ)dτ]+D(t)u(t)
例题