多视图几何——基础矩阵和照相机矩阵
1、基础矩阵原理
如果已知基础矩阵F,以及一个3D点在一个像面上的像素坐标p,则可以求得在另一个像面上的像素坐标p‘。这个是基础矩阵的作用,可以表征两个相机的相对位置及相机内参数。
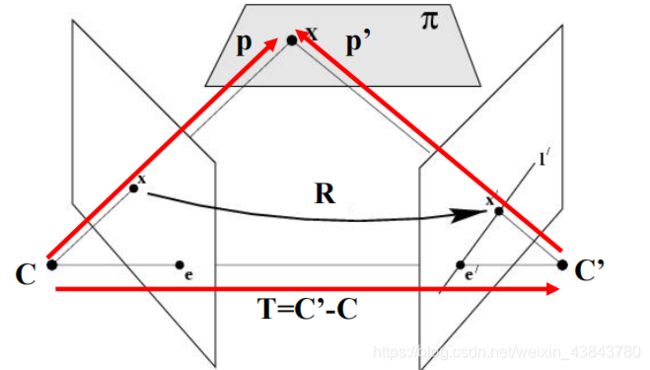
设X在C,C’坐标系中的相对坐标分别p,p’,则有
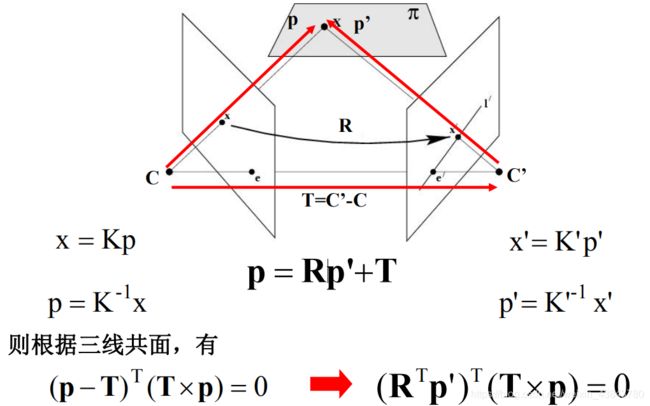
根据:
其中:
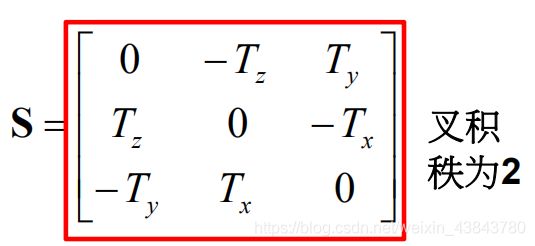
推得:
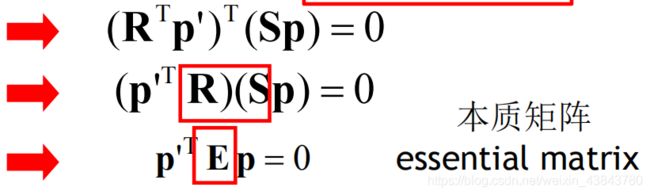
其中的RS相乘得到的E即为本质矩阵,描述了空间中的点在两个坐标系中的坐标对应关系。
根据前述, K 和 K’ 分别为两个相机的内参矩阵,有:

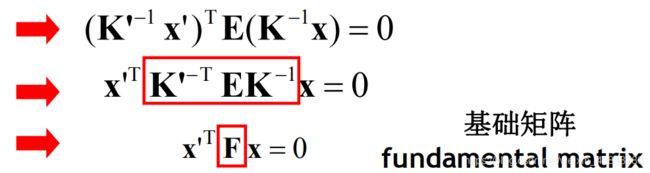
其中的F即为基础矩阵,描述了空间中的点在两个像平面中的坐标对应关系。
基础矩阵是对极几何的代数表达方式,描述了图像中任意对应点 x↔x’ 之间的约束关系。F 为 3x3 矩阵,秩为2,对任意匹配点对 x↔x’ 均满足:
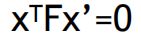
基础矩阵的两大作用是简化匹配去除错配特征。
2、代码实现SFM的特征提取与匹配
首先是求两张图的基础矩阵
代码如下:
#!/usr/bin/env python
# coding: utf-8
# In[1]:
from PIL import Image
from numpy import *
from pylab import *
import numpy as np
from imp import reload
# In[2]:
import importlib
from PCV.geometry import camera
from PCV.geometry import homography
from PCV.geometry import sfm
from PCV.localdescriptors import sift
camera = importlib.reload(camera)
homography = importlib.reload(homography)
sfm = importlib.reload(sfm)
sift =importlib.reload(sift)
# In[3]:
# Read features
im1 = array(Image.open('image5/1.jpg'))
sift.process_image('image5/1.jpg', 'im1.sift')
l1, d1 = sift.read_features_from_file('im1.sift')
im2 = array(Image.open('image5/2.jpg'))
sift.process_image('image5/2.jpg', 'im2.sift')
l2, d2 = sift.read_features_from_file('im2.sift')
# In[9]:
matches = sift.match_twosided(d1, d2)
# In[10]:
ndx = matches.nonzero()[0]
x1 = homography.make_homog(l1[ndx, :2].T)
ndx2 = [int(matches[i]) for i in ndx]
x2 = homography.make_homog(l2[ndx2, :2].T)
x1n = x1.copy()
x2n = x2.copy()
# In[11]:
print (len(ndx))
# In[12]:
figure(figsize=(16,16))
sift.plot_matches(im1, im2, l1, l2, matches, True)
show()
# In[13]:
# Chapter 5 Exercise 1
# Don't use K1, and K2
#def F_from_ransac(x1, x2, model, maxiter=5000, match_threshold=1e-6):
def F_from_ransac(x1, x2, model, maxiter=5000, match_threshold=1e-6):
""" Robust estimation of a fundamental matrix F from point
correspondences using RANSAC (ransac.py from
http://www.scipy.org/Cookbook/RANSAC).
input: x1, x2 (3*n arrays) points in hom. coordinates. """
from PCV.tools import ransac
data = np.vstack((x1, x2))
d = 20 # 20 is the original
# compute F and return with inlier index
F, ransac_data = ransac.ransac(data.T, model,8, maxiter, match_threshold, d, return_all=True)
return F, ransac_data['inliers']
# In[15]:
# find E through RANSAC
model = sfm.RansacModel()
F, inliers = F_from_ransac(x1n, x2n, model, maxiter=5000, match_threshold=1e-3)
# In[16]:
print (len(x1n[0]))
print (len(inliers))
# In[17]:
P1 = array([[1, 0, 0, 0], [0, 1, 0, 0], [0, 0, 1, 0]])
P2 = sfm.compute_P_from_fundamental(F)
# In[18]:
# triangulate inliers and remove points not in front of both cameras
X = sfm.triangulate(x1n[:, inliers], x2n[:, inliers], P1, P2)
# In[19]:
# plot the projection of X
cam1 = camera.Camera(P1)
cam2 = camera.Camera(P2)
x1p = cam1.project(X)
x2p = cam2.project(X)
# In[20]:
figure()
imshow(im1)
gray()
plot(x1p[0], x1p[1], 'o')
#plot(x1[0], x1[1], 'r.')
axis('off')
figure()
imshow(im2)
gray()
plot(x2p[0], x2p[1], 'o')
#plot(x2[0], x2[1], 'r.')
axis('off')
show()
# In[21]:
figure(figsize=(16, 16))
im3 = sift.appendimages(im1, im2)
im3 = vstack((im3, im3))
imshow(im3)
cols1 = im1.shape[1]
rows1 = im1.shape[0]
for i in range(len(x1p[0])):
if (0<= x1p[0][i]0: #plot([locs1[i][0],locs2[m][0]+cols1],[locs1[i][1],locs2[m][1]],'c')
p1 = array([l1[i][0], l1[i][1], 1])
p2 = array([l2[m][0], l2[m][1], 1])
# Use Sampson distance as error
Fx1 = dot(F, p1)
Fx2 = dot(F, p2)
denom = Fx1[0]**2 + Fx1[1]**2 + Fx2[0]**2 + Fx2[1]**2
e = (dot(p1.T, dot(F, p2)))**2 / denom
x1e.append([p1[0], p1[1]])
x2e.append([p2[0], p2[1]])
ers.append(e)
x1e = array(x1e)
x2e = array(x2e)
ers = array(ers)
# In[24]:
indices = np.argsort(ers)
x1s = x1e[indices]
x2s = x2e[indices]
ers = ers[indices]
x1s = x1s[:20]
x2s = x2s[:20]
# In[25]:
figure(figsize=(16, 16))
im3 = sift.appendimages(im1, im2)
im3 = vstack((im3, im3))
imshow(im3)
cols1 = im1.shape[1]
rows1 = im1.shape[0]
for i in range(len(x1s)):
if (0<= x1s[i][0] 1. 室内
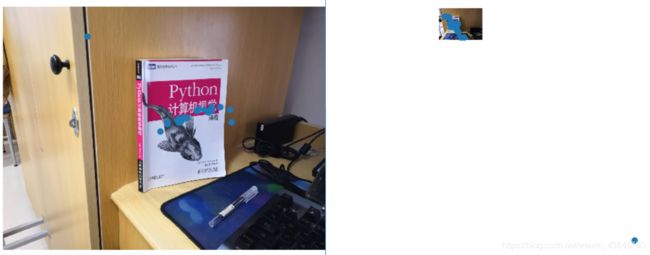
sift特征匹配结果如下:
得到的基础矩阵为:

恢复这些点的三维位置:

修改特征匹配结果后:
2. 室外
两张图分别是:左边的为远点,右边的为近点拍摄的中山纪念馆
sift特征匹配结果如下:
得到的基础矩阵为:

恢复这些点的三维位置:

修改特征匹配结果后:
结果分析:
可以看出来室内由于场景复杂,匹配的特征点更精确一些。而室外由于建筑物存在多处相似特征点导致部分匹配出现错误。但是室内部分的实验是挑了一个结果比较好的展示的,在多次取材过程中,恢复点的三维位置时出现了下图这种奇怪的点位置…好像修改阈值即可,原素材删除了所以无法重新实验。
三维点和照相机矩阵
算法使用的是八点算法,代码如下:
# coding: utf-8
# In[1]:
from PIL import Image
from numpy import *
from pylab import *
import numpy as np
import importlib
# In[2]:
from PCV.geometry import camera
from PCV.geometry import homography
from PCV.geometry import sfm
from PCV.localdescriptors import sift
camera = importlib.reload(camera)
homography = importlib.reload(homography)
sfm = importlib.reload(sfm)
sift =importlib.reload(sift)
# In[3]:
# Read features
im1 = array(Image.open('image5/1.jpg'))
sift.process_image('image5/1.jpg', 'im1.sift')
im2 = array(Image.open('image5/2.jpg'))
sift.process_image('image5/2.jpg', 'im2.sift')
# In[4]:
l1, d1 = sift.read_features_from_file('im1.sift')
l2, d2 = sift.read_features_from_file('im2.sift')
# In[5]:
matches = sift.match_twosided(d1, d2)
# In[6]:
ndx = matches.nonzero()[0]
x1 = homography.make_homog(l1[ndx, :2].T)
ndx2 = [int(matches[i]) for i in ndx]
x2 = homography.make_homog(l2[ndx2, :2].T)
d1n = d1[ndx]
d2n = d2[ndx2]
x1n = x1.copy()
x2n = x2.copy()
# In[7]:
figure(figsize=(16,16))
sift.plot_matches(im1, im2, l1, l2, matches, True)
show()
# In[26]:
#def F_from_ransac(x1, x2, model, maxiter=5000, match_threshold=1e-6):
def F_from_ransac(x1, x2, model, maxiter=5000, match_threshold=1e-6):
""" Robust estimation of a fundamental matrix F from point
correspondences using RANSAC (ransac.py from
http://www.scipy.org/Cookbook/RANSAC).
input: x1, x2 (3*n arrays) points in hom. coordinates. """
from PCV.tools import ransac
data = np.vstack((x1, x2))
d = 10 # 20 is the original
# compute F and return with inlier index
F, ransac_data = ransac.ransac(data.T, model,
8, maxiter, match_threshold, d, return_all=True)
return F, ransac_data['inliers']
# In[27]:
# find F through RANSAC
model = sfm.RansacModel()
F, inliers = F_from_ransac(x1n, x2n, model, maxiter=5000, match_threshold=1e-5)
print (F)
# In[28]:
P1 = array([[1, 0, 0, 0], [0, 1, 0, 0], [0, 0, 1, 0]])
P2 = sfm.compute_P_from_fundamental(F)
# In[29]:
print (P2)
print (F)
# In[30]:
# P2, F (1e-4, d=20)
# [[ -1.48067422e+00 1.14802177e+01 5.62878044e+02 4.74418238e+03]
# [ 1.24802182e+01 -9.67640761e+01 -4.74418113e+03 5.62856097e+02]
# [ 2.16588305e-02 3.69220292e-03 -1.04831621e+02 1.00000000e+00]]
# [[ -1.14890281e-07 4.55171451e-06 -2.63063628e-03]
# [ -1.26569570e-06 6.28095242e-07 2.03963649e-02]
# [ 1.25746499e-03 -2.19476910e-02 1.00000000e+00]]
# In[31]:
# triangulate inliers and remove points not in front of both cameras
X = sfm.triangulate(x1n[:, inliers], x2n[:, inliers], P1, P2)
# In[32]:
# plot the projection of X
cam1 = camera.Camera(P1)
cam2 = camera.Camera(P2)
x1p = cam1.project(X)
x2p = cam2.project(X)
# In[33]:
figure(figsize=(16, 16))
imj = sift.appendimages(im1, im2)
imj = vstack((imj, imj))
imshow(imj)
cols1 = im1.shape[1]
rows1 = im1.shape[0]
for i in range(len(x1p[0])):
if (0<= x1p[0][i]1. 室内
这组拍摄了三张照片,按照从左到右的顺序分别为图1,2,3
图1和图2的特征匹配结果为:
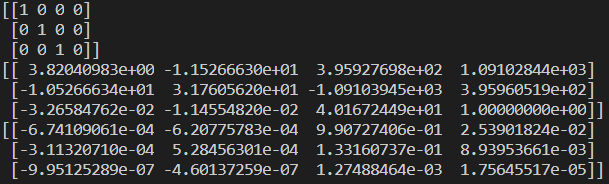
得到的基础矩阵为:

图2的相机矩阵为:

经过处理后的特征匹配为:
图1和图3的匹配结果为:
三张图的相机矩阵为:
2. 室外
这组拍摄了三张照片,按照从远到近的顺序分别为图1,2,3
图1和图2的sift特征匹配结果为:
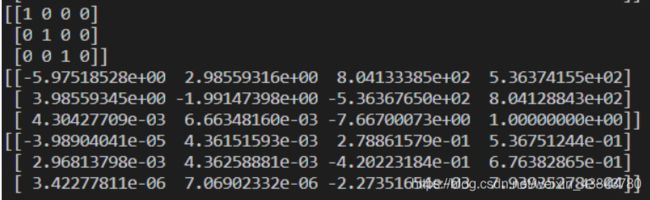
得到的基础矩阵为:

图2的照相机矩阵为:

经过处理后的特征匹配为:
图1和图3的匹配结果:
三张图的相机矩阵为:
结果分析:
可能由于拍摄问题,两组实验结果都不是很理想,特征匹配均出现了一些偏差。
整体实验过程中发现室内取材远远难于室外,室外使用一组图片就通过了运行,而室内至少采集了七八组,但运行到一半大多数都出现了下面这个错误:
![]()
个人感觉是因为室内拍摄时,从图像很难反映出明显的景深差距(当然也可能是我个人拍摄问题…),室外相对拍摄景深差距较大。当然还有光照一些因素导致没有特征匹配点。
匹配结果而言对于环境更加复杂的室内,特征匹配点更少,但是更精确,而室外的特征虽然都远远多于室内,但是存在一些相似的特征点而导致匹配错误。