文献阅读 - Deep Residual Learning for Image Recognition
深度残差学习(Deep Residual Learning for Image Recognition)
He K, Zhang X, Ren S, et al. Deep Residual Learning for Image Recognition[C], CVPR, 2016.
摘要
残差学习框架(residual learning framework):以输入(inputs)为参考,将层(layers)定义为残差学习函数(learning residual functions)
残差网络(residual networks)易于优化,能够通过增加网络深度(depth)提高准确率(gain accuary)。
表示的深度(depth of representations)对许多视觉识别任务(visual recognition tasks)至关重要。
1 引言
深度网络(deep networks)能够提取底层、中层和高层特征(low/mid/high-level features),特征的“层次”可以通过堆叠网络层(stacked layers)的数量(深度)来丰富。
梯度消失、爆炸(vanishing/exploding gradients)问题能够通过初始值标准化(normalized initialization)和层间标准化解决。
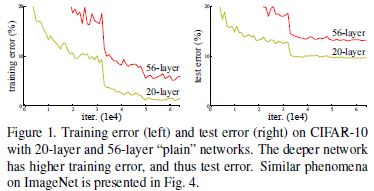
退化问题(degradation problem):随着网络深度的增加,网络预测准确率趋于饱和,然后迅速退化。但这种退化并非由过拟合引起,对恰到好处的深度模型(suitable deep model)添加更多的层会导致其训练误差增加。
为解决退化问题,本文提出一种深度残差学习框架(residual learning framework)。假设目标映射(desired underlying mapping)为 H ( x ) \mathcal{H}(\mathbf{x}) H(x),则堆叠非线性网络层(stacked nonlinear layers)需拟合(fit)的映射为 F ( x ) : = H ( x ) − x \mathcal{F}(\mathbf{x}) := \mathcal{H}(\mathbf{x}) - \mathbf{x} F(x):=H(x)−x。
本文工作的基础是假设优化残差映射比优化原始目标映射容易。极端情况下,如果恒等映射为最优,则相比于拟合恒等映射,堆叠网络层将残差映射拟合为零更加容易。
捷径连接(shortcut connections):跳过一层或多层的连接。本文中,捷径连接简化为恒等映射(identity mapping),其输出与堆叠网络层的输出相加(Fig.2)。
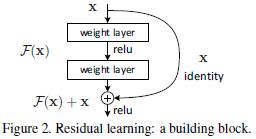
F = W 2 σ ( W 1 x ) \mathcal{F} = \mathbf{W}_2 \sigma(\mathbf{W}_1 \mathbf{x}) F=W2σ(W1x)
σ ( F + x ) \sigma(\mathcal{F} + \mathbf{x}) σ(F+x)
σ : = ReLU \sigma := \text{ReLU} σ:=ReLU
2 相关工作
残差表示(Residual Representations)
求解偏微分方程(Partial Differential Equations,PDE)时,多重网格法(Multigrid method)将方程组分解为多尺度子问题,每个子问题对应粗尺度(coarser scale)和细尺度(finer scale)间的残差解(residual solution)。多重网格法可采用分层预处理(hierarchical basis preconditioning),即以两个尺度间的残差向量(residual vectors)为自变量。现已证明其解收敛速度远大于比标准求解器。
捷径连接(Shortcut Connections)
公路网络(highway networks)
3 深度残差学习(Deep Residual Learning)
3.1 残差学习(Residual Learning)
向一个网络中添加额外的网络层,若添加的网络层拟合目标为恒等映射(identity mappings),则较深的模型训练误差应不大于较浅的模型。因此,退化问题表明使用多层非线性网络(multiple nonlinear layers)难以逼近恒等映射。
令堆叠网络层拟合残差函数 F ( x ) : = H ( x ) − x \mathcal{F}(\mathbf{x}) := \mathcal{H}(\mathbf{x}) - \mathbf{x} F(x):=H(x)−x,而非目标函数 H ( x ) = F ( x ) − x \mathcal{H}(\mathbf{x}) = \mathcal{F}(\mathbf{x}) - \mathbf{x} H(x)=F(x)−x。
学习残差函数的响应较小,这表明恒等映射是一种合理的预处理(reasonable preconditioning)。
3.2 恒等映射捷径(Identity Mapping by Shortcuts)
构建块(building block)定义为:
(1) y = F ( x , { W i } ) + x \mathbf{y} = \mathcal{F}(\mathbf{x}, \{\mathbf{W}_i\}) + \mathbf{x} \tag{1} y=F(x,{Wi})+x(1)
F ( x , { W i } ) \mathcal{F}(\mathbf{x}, \{\mathbf{W}_i\}) F(x,{Wi})表示待学习的残差映射(residual mapping), + + +表示向量按元素相加。
当 F \mathcal{F} F与 x \mathbf{x} x维度不同时,可通过线性投影(linear projection) W s \mathbf{W}_s Ws修改 x \mathbf{x} x的维度
(2) y = F ( x , { W i } ) + W s x \mathbf{y} = \mathcal{F}(\mathbf{x}, \{\mathbf{W}_i\}) + \mathbf{W}_s \mathbf{x} \tag{2} y=F(x,{Wi})+Wsx(2)
实验表明:对于退化问题,恒等映射最为高效、经济
F \mathcal{F} F也可表示多层卷积神经网络,此时, F + x \mathcal{F} + \mathbf{x} F+x表示特征图按通道相加。
3.3 网络结构(Network Architectures)
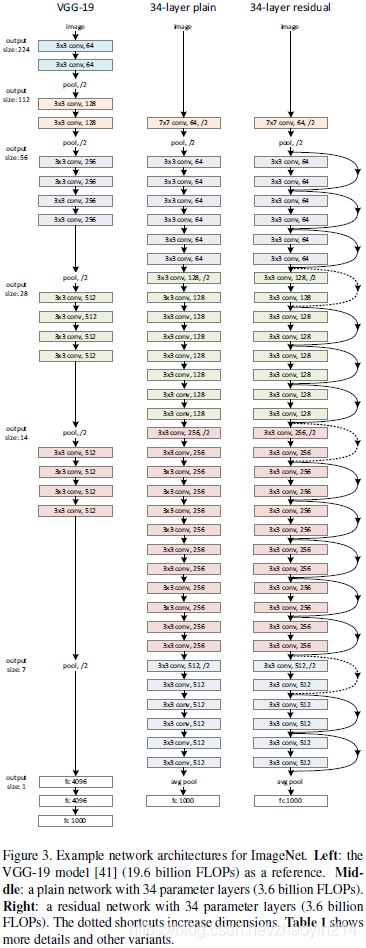
普通网络(Plain Network)
卷积网络设计原则:
(1)若输出特征图(feature map)尺寸相同,则各层滤波器(filter)数量相同;
(2)若输出特征图尺寸减半,则下层滤波器数量加倍,以保正各层计算时间复杂度(time complexity)相同。
大多数卷积层(convolutional layers)采用 3 × 3 3 \times 3 3×3的卷积核。
残差网络(Residual Network)
输入和输出维度相同时,采用恒等捷径(Eqn.(1)),由Fig.3中实线标出;
输出维度增加时,捷径由Fig.3中虚线标出:(1)采用恒等捷径,增加维度用零填充(zero padding);(2)采用投影捷径(Eqn.(2))匹配维度。
3.4 应用(Implementation)
批标准化(batch normalization)位于卷积层(convolution)输出与激活层(activation)输入之间。
学习率(learning rating)初始为0.1。每当误差下降停滞(error plateaus)时,学习率缩小到十分之一。
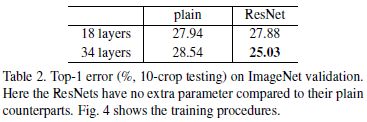
标准10-裁剪测试(standard 10-crop test)
4 实验
4.1 ImageNet分类任务(ImageNet Classification)
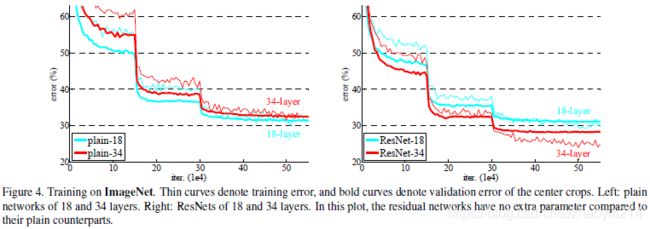
普通网络(Plain Networks)
本文推测退化问题产生的原因:深度普通网络的收敛速度可能呈指数级放缓(exponentially low convergence rates),进而影响训练误差的下降速度。
残差网络(Residual Network)
残差网络:(1)能够解决退化问题,即通过增加网络深度获得准确率增益(accuracy gains);(2)训练初期阶段,网络收敛速度更快。
恒等捷径与投影捷径(Identity vs. Projection Shortcuts)
(1)补零捷径(zero-padding shortcuts)增加维度(increasing dimensions),所有捷径均无参数;
(2)投影捷径(projecttion shortcuts)仅用于增加维度,其它捷径为恒等捷径;
(3)所有捷径均为投影捷径。
补零填充维度不能进行残差学习。处理退化问题时,投影捷径并非必需。

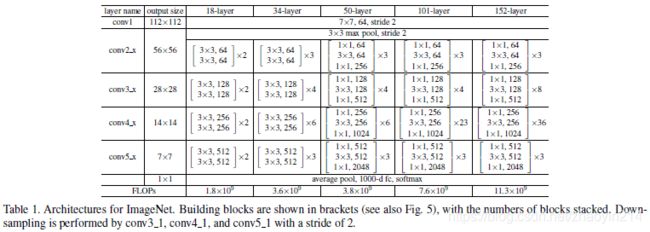
更深的瓶颈结构(Deeper Bottleneck Architectures)
瓶颈设计(a bottleneck design):对于拟合每个残差函数 F \mathcal{F} F的堆叠网络层,用3层结构代替2层结构,3层卷积核尺寸分别为 1 × 1 1 \times 1 1×1、 3 × 3 3 \times 3 3×3和 1 × 1 1 \times 1 1×1,其中 1 × 1 1 \times 1 1×1卷积核用于先减少维度而后增加(恢复)维度,因此 3 × 3 3 \times 3 3×3卷积层类似于瓶颈,其输入、输出维度较小。

对于瓶颈设计,恒等捷径更为高效。
50层残差网络(50-layer ResNet)
将34层残差网络中的2层堆叠网络结构替换为3层瓶颈区块,即为50层残差网络。
101层和152层残差网络(101-layer and 152-layer ResNets)
101层和152层残差网络均使用3层瓶颈区块构建。

与最先进方法的比较(Comparisons with State-of-the-art Methods)
4.2 CIFAR-10及分析(CIFAR-10 and Analysis)
层响应分析(Analysis of Layer Responses)
残差函数通常比非残差函数更接近于零;残差网络越深,其响应幅值范围越小;网络层数越多,残差网络各层对信号的改变越小。