STM32 HAL库 CubeMX教程(五)串口通信基础
STM32 HAL库 CubeMX教程(五)串口通信基础
- 串口通信简介
- CubeMX配置
- 初始化程序分析
- 程序编写
- 参考文献
STM32 HAL库 CubeMX系列教程 目录
串口通信简介
UART: 通用异步收发传输器(Universal Asynchronous Receiver/Transmitter),通常称作 UART。它将要传输的资料在串行通信与并行通信之间加以转换。作为把并行输入信号转成串行输出信号的芯片, UART 通常被集成于其他通讯接口的连结上。
USART:通用同步/异步串行接收/发送器,(Universal Synchronous/Asynchronous Receiver/Transmitter) USART 是一个全双工通用同步/异步串行收发模块,该接口是一个高度灵活的串行通信设备。
接口通过三个引脚与其他设备连接在一起。任何USART双向通信至少需要两个脚:接收数据输入(RX)和发送数据输出(TX)。
RX:接收数据串行输入。通过过采样技术来区别数据和噪音,从而恢复数据。
TX:发送数据输出。当发送器被禁止时,输出引脚恢复到它的I/O端口配置。当发送器被激活,并且不发送数据时, TX引脚处于高电平。在单线和智能卡模式里,此I/O口被同时用于数据的发送和接收。
USART 发送接收有三种基本方式,轮询、中断和 DMA。
USART结构框图:
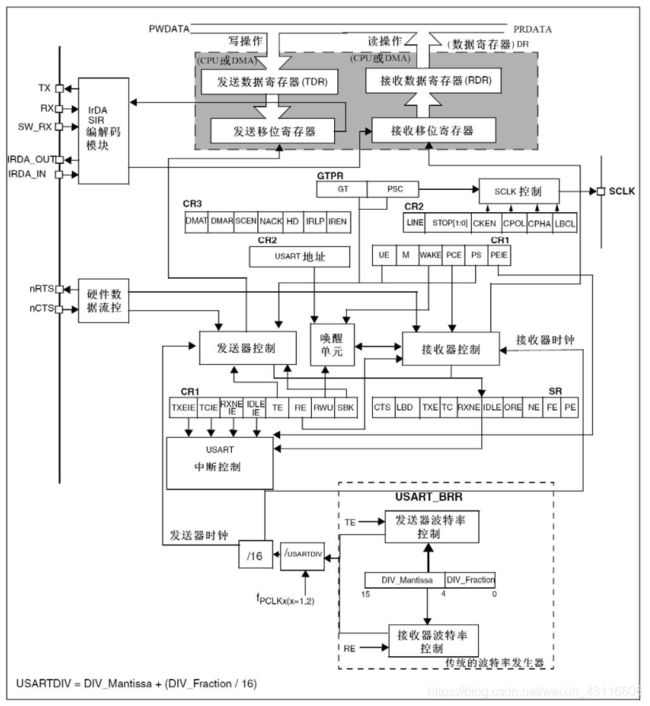
关于USART发送和接收的具体过程请查阅《STM32中文参考手册》,了解即可,重点掌握实际操作应用, CubeMX大大简化了程序的编写。方便应用。
接下来简单演示使用STM32与PC进行数据的相互发送、接收…
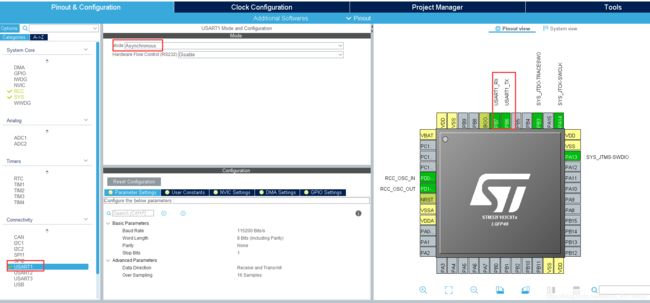
CubeMX配置
串口1默认为PA9,PA10引脚,由于我的单片机开发板PA9,PA10用作了LED驱动,且并未引出,所以将USART1复用到PB6,PB7。
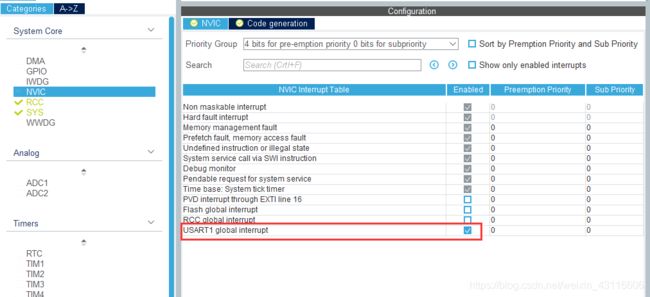
如果使用中断需要使能串口中断:
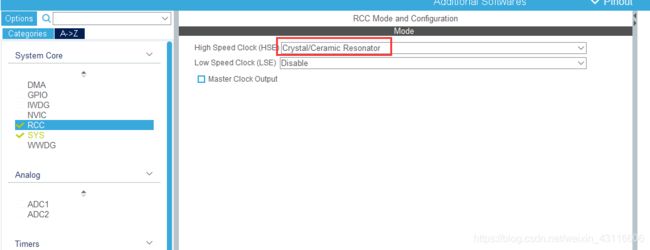
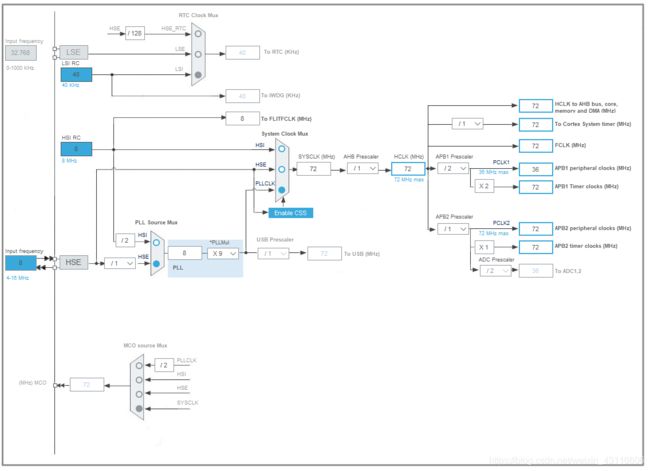
时钟配置:
初始化程序分析
串口设置的一般步骤可以总结为如下几个步骤:
- 串口时钟使能,GPIO 时钟使能
- 串口复位
- GPIO 端口模式设置
- 串口参数初始化
- 开启中断并且初始化 NVIC(如果需要开启中断才需要这个步骤)
- 使能串口
- 编写中断处理函数
使用CubeMX配置,前面6个步骤已经自动帮我们生成了,我们只需要编写中断处理函数和主函数就可以了,我们这里暂时采用轮询的方式并不需要编写中断处理函数。
生成的串口初始化程序主要在usart.c文件中:
- 串口参数初始化
void MX_USART1_UART_Init(void)
{
huart1.Instance = USART1; //串口选择
huart1.Init.BaudRate = 115200; //波特率
huart1.Init.WordLength = UART_WORDLENGTH_8B; //8位字长
huart1.Init.StopBits = UART_STOPBITS_1; //1位停止位
huart1.Init.Parity = UART_PARITY_NONE; //无奇偶校验
huart1.Init.Mode = UART_MODE_TX_RX; //发送接收模式(全双工)
huart1.Init.HwFlowCtl = UART_HWCONTROL_NONE; //不使用硬件流控制
huart1.Init.OverSampling = UART_OVERSAMPLING_16; //过采样
}- 串口硬件初始化
void HAL_UART_MspInit(UART_HandleTypeDef* uartHandle)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
if(uartHandle->Instance==USART1)
{
__HAL_RCC_USART1_CLK_ENABLE(); //串口时钟使能
__HAL_RCC_GPIOB_CLK_ENABLE(); //GPIO端口时钟使能
/**USART1 GPIO Configuration
PB6 ------> USART1_TX
PB7 ------> USART1_RX
*/
GPIO_InitStruct.Pin = GPIO_PIN_6;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct); //PB6端口初始化
GPIO_InitStruct.Pin = GPIO_PIN_7;
GPIO_InitStruct.Mode = GPIO_MODE_INPUT;
GPIO_InitStruct.Pull = GPIO_NOPULL;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct); //PB7端口初始化
__HAL_AFIO_REMAP_USART1_ENABLE(); //使能复用IO时钟
HAL_NVIC_SetPriority(USART1_IRQn, 0, 0); //中断优先级管理
HAL_NVIC_EnableIRQ(USART1_IRQn);
} 程序编写
首先在main.c中重定向printf()和scanf()函数到串口发送和接收,方便应用:
/* USER CODE BEGIN 0 */
int fputc(int ch, FILE *f){
uint8_t temp[1] = {ch};
HAL_UART_Transmit(&huart1, temp, 1, 0xffff);
return ch;
}
int fgetc(FILE * f)
{
uint8_t ch = 0;
HAL_UART_Receive(&huart1,&ch, 1, 0xffff);
return ch;
}
/* USER CODE END 0 */然后我们就可以在主函数中使用printf发送数据了:打印一个Pikachu
#define user_main_printf(format, ...) printf( format "\r\n", ##__VA_ARGS__)/* USER CODE BEGIN 2 */
user_main_printf("hello world!");
user_main_printf(" .__ __ .__ ");
user_main_printf("______ |__| | _______ ____ | |__ __ __ ");
user_main_printf("\\____ \\| | |/ /\\__ \\ _/ ___\\| | \\| | \\");
user_main_printf("| |_> > | < / __ \\ \\___| Y \\ | /");
user_main_printf("| __/|__|__|_ \(____ /\\___ >___| /____/ ");
user_main_printf("|__| \\/ \\/ \\/ \\/ ");
/* USER CODE END 2 */采用轮询方式接收数据,并且发送到PC串口助手窗口显示:
while (1)
{
ch=getchar();
HAL_UART_Transmit(&huart1,&ch,1,0);
}通过串口助手可以看到打印了hello world和pikachu ,并且在发送窗口发送字符,单片机收到后再发送给PC显示:

仅供参考,错误之处以及不足之处还望多多指教!!
参考文献
- 硬石YS-F1Pro开发板开发手册(HAL库版本20170104更新).pdf
- ALIENTEK 精英 STM32F103 开发板教程.pdf
- STM32F10xxx参考手册.pdf
- 【野火】《STM32+HAL+库开发实战指南—基于F103-MINI》.pdf
- 我的19岁-电子设计大赛.pdf