原语,即primitive.
不同的厂商,原语不同;
同一家的FPGA,不同型号的芯片,可以也不一样;
原语类似最底层的描述方法.
使用原语的好处,
可以直接例化使用,不用定制IP;
即可通过复制原语的语句,然后例化IP,就可使用;
题外话, Altera和Xilinx在例化IP使用时,所用方法不同.
Altera是通过原语例化后,在通过defparam来重新定义参数,再使用;
Xilinx是通过直接修改原语中的参数再例化IP来使用;
最近用到xilinx的芯片,
看到它原语的介绍,摘录如下.以后用在Altera的再补充.
X公司的原语分为10类,包括:计算组件,IO端口组件,寄存器/锁存器,时钟组件,
处理器组件,移位寄存器,配置和检测组件,RAM/ROM组件,Slice/CLB组件,G-tranceiver.
以最常用的时钟组件举例.

其中,以上的DCM_,在某些器件里都可以换成PLL_.
BUFG
具有高扇出的全局时钟缓冲器.通过它可接入到全局时钟网络中.
也常接复位,时钟使能信号等.
Eg. BUFG bufg_inst( .O(clk_o), .I( clk_i));
BUFMUX
全局时钟利用器,选择两个输入时钟I0或I1中的一个作为输出;S为选择信号,
S=0时,输出I0, S=1时,输出I1;
Eg. BUFGMUX bufgmux_inst(.O(clk_o),
.I0(clk1_i),
.I1(clk2_i),
.S(s)
);
BUFIO
本地IO时钟缓冲器.使用独立于全局时钟网络的专用时钟网络来驱动纵向IO管脚.
非常适合同步数据采集;BUFIO要求时钟和相应的IO必须在同一时钟区域,而不同的时钟网络的驱动需要BUFR原语来实现.由于BUFIO引出的时钟只到达了IO列,所以不能来驱动逻辑资源,比如CLB和BRAM.
Eg. BUFIO bufio_inst( .O(clk_o), .I(clk_i0));
BUFR
本地IO时钟逻辑缓冲器.与BUFIO一样是将驱动时钟引入某一时钟区域的专用时钟网络,而独立于全局时钟网络;不同的是,BUFR不仅可以跨越不同的时钟区域(最多3个),还能够驱动IO逻辑以及自身或邻近时钟区域的逻辑资源.BUFIO的输出和本地内部互联都能驱动BUFR组件.此外,BUFR能完成输入时钟1—8的整数分频.因些BUFR是同步设计中实现跨时钟域以及串并转换的最佳方案.
Eg. BUFR #(
.BUFR_DIVEDE(“BYPASS”),//分频比,可选择BYPASS,1—8
.SIM_DEVICE(“VIRTEX4”)
)BUFR_inst(
.O(clk_o),
.CE(CE),
.CLR(clr),
.I(clk_i)
);
DCM_BASE
基本数字时钟管理模块的缩写,是相伴和频率可配置的数字锁相环电路,常用于FPGA系统中复杂的时钟管理.如需要频率和相位动态生配置,则可以选用DCM_ADV原语,如果需要相位动态偏移,可使用DCM_PS原语.
Eg. DCM_BASE#(….)
DCM_BASE #(
.CLKDV_DIVIDE(2.0),
// CLKDV 分频比可以设置为: 1.5,2.0,2.5,3.0,3.5,4.0,4.5,5.0,5.5,6.0,6.5
// 7.0,7.5,8.0,9.0,10.0,11.0,12.0,13.0,14.0,15.0 or 16.0
.CLKFX_DIVIDE(1), // Can be any integer from 1 to 32
// CLKFX 信号的分频比,可为1 到32 之间的任意整数
.CLKFX_MULTIPLY(4),
// CLKFX 信号的倍频比,可为2 到32 之间的任意整数
.CLKIN_DIVIDE_BY_2("FALSE"),
// 输入信号2 分频的使能信号,可设置为TRUE/FALSE
.CLKIN_PERIOD(10.0),
// 指定输入时钟的周期,单位为ns,数值范围为1.25~1000.00。
.CLKOUT_PHASE_SHIFT("NONE"),
// 指定移相模式,可设置为NONE 或FIXED
.CLK_FEEDBACK("1X"),
// 指定反馈时钟的频率,可设置为NONE、1X 或2X。相应的频率关系都是
针对CLK0 而言的。
.DCM_PERFORMANCE_MODE("MAX_SPEED"),
// DCM 模块性能模式,可设置为MAX_SPEED 或MAX_RANGE
.DESKEW_ADJUST("SYSTEM_SYNCHRONOUS"),
// 抖动调整,可设置为源同步、系统同步或0~15 之间的任意整数
.DFS_FREQUENCY_MODE("LOW"),
// 数字频率合成模式,可设置为LOW 或HIGH 两种频率模式
.DLL_FREQUENCY_MODE("LOW"),
// DLL 的频率模式,可设置为LOW、HIGH 或HIGH_SER
.DUTY_CYCLE_CORRECTION("TRUE"),
// 设置是否采用双周期校正,可设为TRUE 或FALSE
.FACTORY_JF(16'hf0f0),
// 16 比特的JF 因子参数
.PHASE_SHIFT(0),
// 固定相移的数值,可设置为-255 ~ 1023 之间的任意整数
.STARTUP_WAIT("FALSE")
// 等DCM 锁相后再延迟配置DONE 管脚,可设置为TRUE/FALSE
) DCM_BASE_inst (
.CLK0(CLK0), // 0 度移相的DCM 时钟输出
.CLK180(CLK180), // 180 度移相的DCM 时钟输出
.CLK270(CLK270), // 270 度移相的DCM 时钟输出
.CLK2X(CLK2X), // DCM 模块的2 倍频输出
.CLK2X180(CLK2X180), // 经过180 度相移的DCM 模块2 倍频输出
.CLK90(CLK90), // 90 度移相的DCM 时钟输出
.CLKDV(CLKDV), // DCM 模块的分频输出,分频比为CLKDV_DIVIDE
.CLKFX(CLKFX), // DCM 合成时钟输出,分频比为(M/D)
.CLKFX180(CLKFX180), // 180 度移相的DCM 合成时钟输出
.LOCKED(LOCKED), // DCM 锁相状态输出信号
.CLKFB(CLKFB), // DCM 模块的反馈时钟信号
.CLKIN(CLKIN), // DCM 模块的时钟输入信号
.RST(RST) // DCM 模块的异步复位信号
);
PLL_BASE
Xilinx的低端的FPGA中都用DCM,高级一点的都用PLL.
这个再多说一句,使用PLL时,输出时钟
Clk_out = Clkin*Mult / DIVCLK_DIVIDE /CLKOUTx_DIVIDE;
Eg.
PLL_BASE #(
.BANDWIDTH("OPTIMIZED"), // "HIGH", "LOW" or "OPTIMIZED"
.CLKFBOUT_MULT(2), // Multiplication factor for all output clocks
.CLKFBOUT_PHASE(0.0), // Phase shift (degrees) of all output clocks
.CLKIN_PERIOD(0.000), // Clock period (ns) of input clock on CLKIN
.CLKOUT0_DIVIDE(5), // Division factor for CLKOUT0 (1 to 128)
.CLKOUT0_DUTY_CYCLE(0.5), // Duty cycle for CLKOUT0 (0.01 to 0.99)
.CLKOUT0_PHASE(0.0), // Phase shift (degrees) for CLKOUT0 (0.0 to 360.0)
.CLKOUT1_DIVIDE(1), // Division factor for CLKOUT1 (1 to 128)
.CLKOUT1_DUTY_CYCLE(0.5), // Duty cycle for CLKOUT1 (0.01 to 0.99)
.CLKOUT1_PHASE(0.0), // Phase shift (degrees) for CLKOUT1 (0.0 to 360.0)
.CLKOUT2_DIVIDE(1), // Division factor for CLKOUT2 (1 to 128)
.CLKOUT2_DUTY_CYCLE(0.5), // Duty cycle for CLKOUT2 (0.01 to 0.99)
.CLKOUT2_PHASE(90), // Phase shift (degrees) for CLKOUT2 (0.0 to 360.0)
.CLKOUT3_DIVIDE(2), // Division factor for CLKOUT3 (1 to 128)
.CLKOUT3_DUTY_CYCLE(0.5), // Duty cycle for CLKOUT3 (0.01 to 0.99)
.CLKOUT3_PHASE(0.0), // Phase shift (degrees) for CLKOUT3 (0.0 to 360.0)
.CLKOUT4_DIVIDE(1), // Division factor for CLKOUT4 (1 to 128)
.CLKOUT4_DUTY_CYCLE(0.5), // Duty cycle for CLKOUT4 (0.01 to 0.99)
.CLKOUT4_PHASE(0.0), // Phase shift (degrees) for CLKOUT4 (0.0 to 360.0)
.CLKOUT5_DIVIDE(1), // Division factor for CLKOUT5 (1 to 128)
.CLKOUT5_DUTY_CYCLE(0.5), // Duty cycle for CLKOUT5 (0.01 to 0.99)
.CLKOUT5_PHASE(0.0), // Phase shift (degrees) for CLKOUT5 (0.0 to 360.0)
.COMPENSATION("SYSTEM_SYNCHRONOUS"), // "SYSTEM_SYNCHRONOUS",
// "SOURCE_SYNCHRONOUS", "INTERNAL", "EXTERNAL",
// "DCM2PLL", "PLL2DCM"
.DIVCLK_DIVIDE(1), // Division factor for all clocks (1 to 52)
.REF_JITTER(0.100) // Input reference jitter (0.000 to 0.999 UI%)
) pll2 (
.CLKFBOUT(CLKFBIN), // General output feedback signal
.CLKOUT0(clk_100M), // 80M 0d
.CLKOUT1(), // 10M 0d
.CLKOUT2(), //80M 90d
.CLKOUT3(), // One of six general clock output signals
.CLKOUT4(), // One of six general clock output signals
.CLKOUT5(), // One of six general clock output signals
.LOCKED(), // Active high PLL lock signal
.CLKFBIN(CLKFBIN), // Clock feedback input
.CLKIN(clk), // Clock input
.RST(~rst_n) // Asynchronous PLL reset
);
再举IO组件为例,
I/O 组件提供了本地时钟缓存、标准单端I/O 缓存、差分I/O 信号缓存、DDR
专用I/O 信号缓存、可变抽头延迟链、上拉、下拉以及单端信号和差分信号
之间的相互转换,具体包括了21 个原语.

BUFIO
上文讲过
IBUFDS
用于将差分输入信号转为标准单端信号,且可加入可选延迟.
输入信号为I,IB,一个为主,一个为从,二者相伴相反.真值表如下:
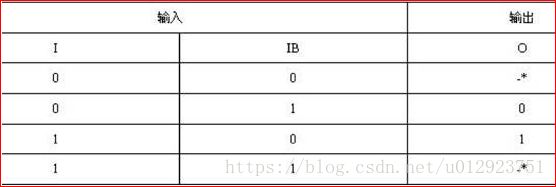
其中-*, 表示维持原输出值.
Eg. IBUFDS refclk_ibuf (.O(sys_clk_c), .I(sys_clk_p), .IB(sys_clk_n)); //差分时钟进来
IDELAY
用户IO管脚的输入通路都有一个IDELAY模块,可用于数据信号或时钟信号,使二者同步,实现准确采集输入数据.IDELAY具有可控的64抽头延迟线,每个抽头的延迟都是经过精密校准的78ps(这个不同的芯片应该不同),且与进程,电压和温度特性无关.可弥补PCB的布线长度不一致带来的延时不同的问题.
信号说明:
I:单比特输入信号,来自于IOB 的串行输入数据;
C:单比特输入信号,时钟输入信号;
INC:单比特输入信号,用于增加或减少延迟抽头数;
CE:单比特输入信号,使能延迟抽头数增加或减少的功能;
RST:单比特输入信号,复位延迟链的延迟抽头数,如果没有编程输入则为0;
O:单比特输出信号。
Eg. IDELAY#(
.IOBDELAY_TYPE(“DEFAULT”),
.IOBDELAY_VALUE(0) //输入延迟周期,可设置0—63
) IDELAY_inst(
.O(data_o),
.C(c),
.CE(ce),
.I(data_i),
.INC(inc),
.RST(rst)
);
OBUFDS
将标准单端信号转换成差分信号,输出端口需要直接对应到顶层模块的输出信号.与IBUFDS为一对互逆操作.

Eg. OBUFDS #(
.IOSTANDARD("DEFAULT")
// 指名输出端口的电平标准
) OBUFDS_inst (
.O(O), // 差分正端输出,直接连接到顶层模块端口
.OB(OB), // 差分负端输出,直接连接到顶层模块端口
.I(I) // 缓冲器输入
);
IOBUF
单端双向缓冲器,其IO接口必须和指定的电平标准相对应,支持LVTTL,LVCOMS12, LVCMOS18, LVCMOS25以及33等信号标准.同时还可通过DRIVE, FAST以及SLOW等约束来满足不同驱动和抖动速率的需求.默认的驱动能力是12mA,低抖动. IOBUF由IBUF和OBUFT两个基本组件构成,当IO端口为高阻时,其输出口O为不定态.

Eg. // Xilinx HDL 库向导版本,ISE 9.1
IOBUF #(
.DRIVE(12),
// 指定输出驱动的强度
.IOSTANDARD("DEFAULT"),
// 指定I/O 电平的标准,不同的芯片支持的接口电平可能会有所不同
.SLEW("SLOW")
// 制定输出抖动速率
) IOBUF_inst (
.O(O), // 缓冲器的单元输出
.IO(IO), // 缓冲器的双向输出
.I(I), // 缓冲器的输人
.T(T) // 3 态使能输入信号
);
PULLDOWN / PULLUP
IO口内部上位或下位.上位是为了解决总线驱动能力不足时提供电流的,下拉电阻是用来吸引电流的.
Eg. PULLDOWN pulldown_inst( .O(data_o) );
PULLUP pullup_inst( .O(data_o) );