c++实现图的广度优先搜索(BFS)和深度优先搜索(DFS)
1. 基本概念
- 图分为无向图和有向图。
- 与一个顶点相邻接的顶点数叫做该顶点的度。在有向图中,进入一个顶点的弧叫做该顶点的入度,从一个顶点发出的弧叫做该顶点的出度。
- 在无向图中,若图中任意一对顶点都是连通的,则称此图是连通图。
- 在有向图中,若任意一对顶点u和v间存在一条从u到v的路径和从v到u的路径,则称此图是强连通图。
- 无向图的一个极大连通子图称为该图的一个连通分量。
- 有向图的一个极大强连通子图称为该图的一个强连通分量。
- 在图的每条边上加上一个数字作权,也称代价,带权的图称网。
关于图的基本概念实在是太多了,大家可以找一本数据结构的书看看,这里也推荐一篇博客可以看看图(1)——图的定义和基本概念
2. 图的表示方式
图基本上有二种表达方式,分别是邻接表和邻接矩阵。数据结构 学习笔记(七):图(上):图的表示方法(邻接表,邻接矩阵),遍历(DFS,BFS)
这里我们使用的是邻接表方法。
3. 图的存储结构
class Graph {
private:
int V; // vertex num
std::list<int>* adj; // adjacency list
public:
Graph(int V);
~Graph();
void addEdge(int v, int w);
};
Graph::Graph(int V) {
this->V = V;
adj = new std::list<int> [V]; // init adjacency list
}
Graph::~Graph() {
delete [] adj; // need [] attention!
adj = nullptr;
}
void Graph::addEdge(int v, int w) {
adj[v].push_back(w);
}
int main()
{
int V(5);
Graph g(V); // create graph
std::set<int> edgeInput[V];
edgeInput[0].insert({1, 2});
edgeInput[1].insert({3, 4});
for (int i = 0; i < V; ++i) {
for (auto it = edgeInput[i].begin(); it != edgeInput[i].end(); ++it) {
g.addEdge(i, *it); // insert edge
}
}
return 0;
}
这里的话我们使用邻接表的方法,为了方便我们这里使用STL::list结构,这样话我们使用std::list就可以实现了整个邻接表的描述,这个比使用二级指针表述邻接表要方便一点。
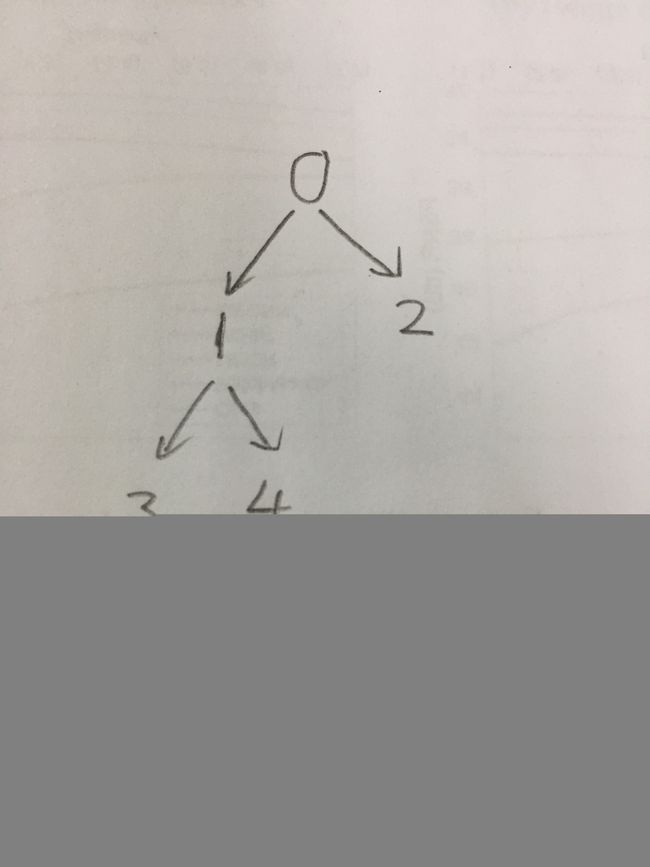
我们使用以下的有向无环图作为我们的测试例子:
4. 深度优先搜索遍历
首先访问图中某一起始顶点0,然后由0出发,访问与v邻接且未被访问的任一顶点1,再访问与1邻接且未被访问的任一顶点3,……重复上述过程。当不能再继续向下访问时,依次退回到最近被访问的顶点,若它还有邻接顶点未被访问过,则从该点开始继续上述搜索过程,直到图中所有顶点均被访问过为止。
DFS本质是一种递归调用,我们可以直接使用递归也可以使用栈来代替递归的过程,同时我们注意需要使用一个visited数组来保存我们的元素是否已经被遍历过了。或者我们也可以使用std::set进行代替。
void Graph::DFSUtil(int v, bool* visited) {
visited[v] = true;
std::cout << v << " ";
for (auto it = adj[v].begin(); it != adj[v].end(); ++it) {
if (!visited[*it]) {
DFSUtil(*it, visited);
}
}
}
void Graph::DFS() {
bool* visited = new bool[V];
for (int i = 0; i < V; ++i) {
visited[i] = false;
}
for (int j = 0; j < V; ++j) {
if (!visited[j]) {
DFSUtil(j, visited);
}
}
}
5. 广度优先搜索遍历
首先访问起始顶点0,接着由0出发,依次访问0的各个未访问过的邻接顶点1,2,…,,然后再依次访问1,2,…,的所有未被访问过的邻接顶点;再从这些访问过的顶点出发,再访问它们所有未被访问过的邻接顶点……依次类推,直到图中所有顶点都被访问过为止。
广度优先搜索是一种分层的查找过程,每向前走一步可能访问一批顶点,不像深度优先搜索那样有往回退的情况,因此它不是一个递归的算法。为了实现逐层的访问,算法必须借助一个辅助队列,以记录正在访问的顶点的下一层顶点。
void Graph::BFSUtil(int v, bool* visited) {
std::queue<int> myqueue;
visited[v] = true;
myqueue.push(v);
while (!myqueue.empty()) {
v = myqueue.front();
std::cout << v << " ";
myqueue.pop();
for (auto it = adj[v].begin(); it != adj[v].end(); ++it) {
if (!visited[*it]) {
visited[*it] = true;
myqueue.push(*it);
}
}
}
}
void Graph::BFS() {
bool* visited = new bool[V];
for (int i = 0; i < V; ++i) {
visited[i] = false;
}
for (int j = 0; j < V; ++j) {
if (!visited[j]) {
BFSUtil(j, visited);
}
}
}
6. 完整代码
#include
#include 
7. 参考文献
- 《C++实现数据结构》:图
- 广度优先搜索的实现
- 深度优先搜索的实现
这里尤其感谢参考文献2和3,主要也是参考这个代码的,尤其是那种图的数据结构还是比较方便的。