阿里巴巴高德地图AMAP-TECH算法大赛于7月8日开启初赛,赛题为「基于车载视频图像的动态路况分析」,活动邀请了业界权威专家担任评委,优秀选手不仅可以瓜分丰厚的奖金,领取荣誉证书,还有机会进入高德地图【终面通道】!赶紧邀请小伙伴一起来参赛吧。
报名请戳:
https://tianchi.aliyun.com/co...
下面给大家介绍下大赛详情。
一、背景
高德地图每天会为用户提供海量的定位和路线导航规划服务,其所提供的路况状态信息(即道路交通是拥挤、缓行还是畅通)的准确性会影响到用户在出行过程中的决策和体验。传统的路况状态主要依靠驾车用户的轨迹信息生成。在用户少、驾驶行为异常的道路上,这种方法难以保证路况状态的准确性。
车载视频图像包含了更多的信息量,给了我们另外一个解决问题的视角。通过视频或图片,可以观察到路面的真实状态,包括机动车数量、道路宽度和空旷度等等。基于车载视频图像可以获取更准确的路况状态,为用户出行提供更高质量的服务。
本赛题要求参赛者通过计算机视觉等人工智能算法,基于视频图像中识别到的路面信息来判断道路通行状态,提高道路路况状态判断的准确性,从而提升高德地图用户的出行体验。
二、赛题描述及数据说明
术语说明
路况:根据道路的平均车速、道路等级,对道路上车辆通行状态的描述,分为畅通、缓行、拥堵三个等级,在高德地图上显示为绿色、黄色、红色,如图1所示。
参考帧:存在图像序列内路况状态渐变的情况,每个图像序列存在一幅参考帧图像,参考帧时刻的路况状态为该图像序列的真值路况状态。
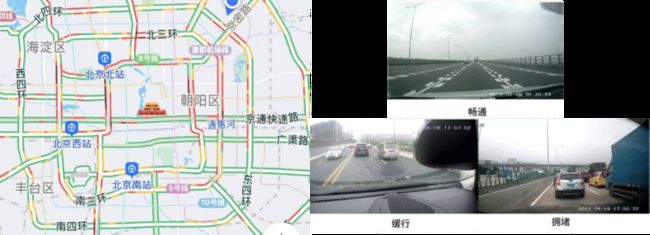
图1. 路况状态示意图
问题定义
输入:给定一组含有GPS时间的图像序列(包含3-5帧图像),其中一幅图像作为参考帧。
输出:以参考帧为准,输出该图像序列对应的路况状态(畅通、缓行和拥堵)。
如下图所示,该序列包含3帧图像,其中第3帧图像为参考帧。算法需要基于整个序列,推断路况状态。当图像序列内的路况状态不一致时,以参考帧为准。

图2. 路况判断流程示意
图像序列由行车记录仪拍摄,路况真值(ground truth)是对应道路当前时刻真实的路况状态。大部分场景下,前方车辆的数量和密度决定了路况状态,但是也存在一些其他情况供参赛选手参考:
- 行驶道路存在大量路边停车,但不影响车辆行驶,实际路况状态为畅通。
- 跟车距离较近,前车遮挡视野内道路的情况,影响对当前路况的判断。
- 行驶在双向道路,对向车道拥堵,行驶车道路况状态为缓行或畅通。
- 相机安装存在角度偏差,可能会影响路况判断。
数据说明
数据集分为预赛数据集和复赛数据集,预赛数据集先公布,仅供预赛使用。复赛数据集等预赛结束后公布,复赛中也可以使用预赛数据集。预赛数据集包括训练集和测试集。训练集合有1500个序列、共约7000幅图像;测试集合为600个序列、共约2800幅图像。预赛数据集包含不同等级的道路,包含高速路、城市快速路、普通道路等。路况真值类型的分布情况约为畅通70%、缓行10%、拥堵20%。路况真值主要基于参考帧标注。路面车辆较多的情况下,在标注时结合了序列中其他帧的信息。
数据格式
数据组织是以图像序列为单位,每个文件夹包含参考帧和其前后相邻帧的图像序列,图像序列最多为5帧图像。
提供数据中包含以下信息:
- 图像序列的参考帧图像名。
- 图像序列的路况状态。
- 0:畅通,1:缓行,2:拥堵,-1:测试集真值未给出。
- 每帧图像采集时刻的GPS时间。
- 单位为秒。如GPS时间 1552806926 比 1552806921 滞后5秒钟。
提供JSON格式标注文件,具体数据格式示意如下:
"status": 0 畅通,1 缓行,2 拥堵,-1 未知(测试集默认状态为-1)
{ "annotations": [
{ "id": "000001", "key\_frame": "2.jpg", "status": 0, "frames": \[
{ "frame\_name": "1.jpg", "gps\_time": 1552806921 },
{ "frame\_name": "2.jpg", "gps\_time": 1552806926 },
{ "frame\_name": "3.jpg", "gps\_time": 1552806931 },
{ "frame\_name": "4.jpg", "gps\_time": 1552806936 }
\]
},
{ "id": "000002", "key\_frame": "3.jpg", "status": 2, "frames": \[
{ "frame\_name": "1.jpg", "gps\_time": 1555300555 },
{ "frame\_name": "2.jpg", "gps\_time": 1555300560 },
{ "frame\_name": "3.jpg", "gps\_time": 1555300565 },
{ "frame\_name": "4.jpg", "gps\_time": 1555300570 },
{ "frame\_name": "5.jpg", "gps\_time": 1555300580 }
\]
}
\]}
评价方式
路况包含通畅/缓行/拥堵三种状态,比赛评分考量每个图像序列的路况分类的准确情况,采用加权 F1 Score 作为算法评价指标。



三、权威专家评委团
为体现比赛的专业性,我们邀请到了多位权威专家来担任评委,包括:北京大学教授 查红彬、中科院自动化所研究员 王亮、阿里巴巴高德地图技术委员会主席 李小龙(聪云)、阿里巴巴高德地图首席科学家 任小枫、阿里巴巴达摩院自动驾驶实验室负责人 王刚(永川)。同时,阿里巴巴高级算法专家郝志会担任本次比赛的明星师兄,他们将为参赛团队提供最为专业的指导。
四、赛程、参赛对象
本次大赛分为初赛、复赛及决赛三个阶段:
报名(7月8日-8月28日,UTC+8)。
初赛(7月8日-8月31日,UTC+8)。
复赛(9月4日-10月13日,UTC+8)。
决赛(10月下旬,具体时间待定,UTC+8)。
数据集将于7月8日正式开放下载。7月20日10:00 AM以后可以在线提交测试集的路况识别结果(JSON文件格式)进行评测。评估程序根据真值,计算选手得分。
大赛面向全社会开放,个人、高等院校、科研单位、企业、创客团队等人员均可报名参赛,个人参赛或组队均可,组队人数上限为3人。
五、奖项设置
冠军:1支队伍,奖金6万元人民币+获奖证书。
亚军:1支队伍,奖金4万元人民币+获奖证书。
季军:1支队伍,奖金2万元人民币+获奖证书。
优胜奖:2支队伍,每支队伍奖金1万元人民币+获奖证书。
复赛审核通过的排名前10的队伍将有机会进入阿里巴巴高德地图校招绿色通道。
(上述奖项以方案评审及线上实战总决赛后的最终名次决定)
拉上小伙伴来参赛吧!
六、参赛者交流钉钉群
扫描以下二维码或搜索钉钉群号 31160357 加入,重要节点通知会在群内第一时间告知,如对本次赛事、赛题及赛制有任何疑问,也可在群内@任意管理员提问。

