力反馈 OpenHaptics ProgGuide-HDAPI
本节目的:学习HDAPI中的常用操作
原文来源于 OpenHaptics ProgGuide 中第5节,翻译理解水平有限,如有错误望指正。
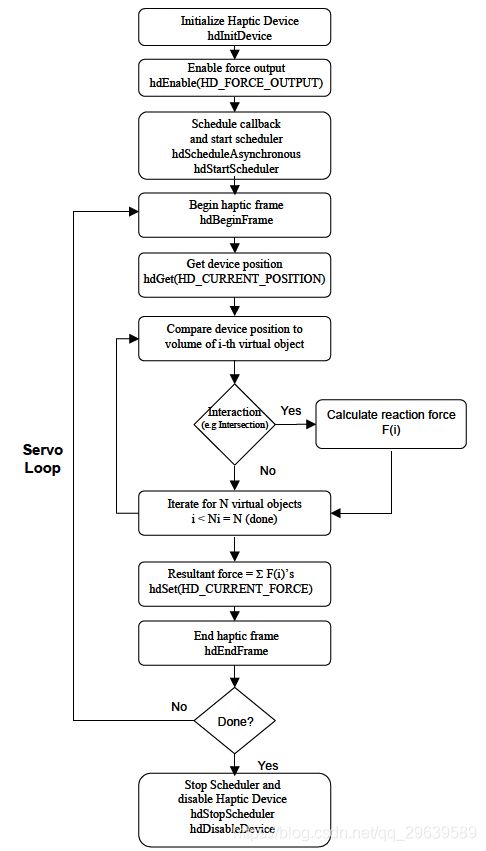
HDAPI 程序典型流程
采用 PHANTOM mini
1: 触控设备操作
对设备的操作包含获取和设置状态,且只能在伺服循环中通过调度程序回调的方式使用。
1. 初始化
首先对设备初始化
HHD hHD = hdInitDevice(HD_DEFAULT_DEVICE);
然后启动力
hdEnable(HD_FORCE_OUTPUT)
当调度程序启动时才会真正启动力
2. 设置当前设备
hdMakeCurrentDevice(hHD);
当多个设备使用时需要轮流设置不同的设备作为当前设备,使其可以被操作。如果只有一个设备则无需调用
3. 设备能力(选项)
有些设备的特性是可以开关的,hdEnable() 或者 hdDisable()
2: 触控帧
- 触控帧定义了一个范围(hdBeginFrame()和hdEndFrame()为界),在该范围内设备状态保证一致。在帧的开始,更新并存储设备状态以在该帧中使用,帧中的所有状态查询使用这些数据。帧结束时,将诸如力的新状态写出到设备。从上一帧获取最后信息,例如位置信息。
- 大多数触控操作应该在触控帧内运行。在帧内调用操作可确保所使用数据的一致性,因为状态在帧内保持不变。获取帧外的状态通常会返回最后一帧的状态。在帧外设置状态通常会导致错误。
3: 调度程序操作
调度程序允许在调度程序线程中运行调用。由于设备需要以非常高的速率(通常1000Hz)发送强制更新,因此调度程序管理高优先级线程。如果开发人员需要进行查询或更改状态,他应该在此循环中执行此操作。否则,由于状态不断变化,应用程序查询或设置状态通常是不安全的。例如,用户不应该查询以调度程序执行速率更改的数据,变量不应该在两个线程之间共享。
用户应该仅通过使用调度程序回调来访问由触控线程修改的变量。
回调函数通常是下面这样
HDCallbackCode HDCALLBACK DeviceStateCallback(void *pUserData);
返回下面两个值之一
HD_CALLBACK_DONE or HD_CALLBACK_CONTINUE
根据返回值决定回调函数是否继续运行。
可以将回调设置为运行一次或者多次,具体取决于回调的返回值。如果返回值请求继续回调,则重新调度并在下一个回调时钟周期再次运行。否则将从调度程序中删除并被认为是完整的,并在同步操作的情况下将控制返回到调用线程。
例子
// 客户端数据声明
struct DeviceDisplayState{
HDdouble position[3];
HDdouble force[3];
}
// 客户端数据的使用
HDCallbackCode HDCALLBACK DeviceStateCallback(void *pUserData){
DeviceDisplayState *pDisplayState = static_cast(pUserData);
hdGetDoublev(HD_CURRENT_POSITION, pDisplayState->position);
hdGetDoublev(HD_CURRENT_FORCE, pDisplayState->force);
// 只调用一次
return HD_CALLBACK_DONE;
}
同步/异步调用
同步调用:调用完成后返回,应用程序线程等待同步调用完成后继续
主要用来获取应用程序调度程序状态的快照,例如应用程序查询位置或者调度程序正在更改的变量或者状态,应该使用同步调用来执行(也就是说查询的值如果在更改,则线程等待更改完成后再返回)
例如
// 获取当前位置
DeviceDisplayState state;
hdScheduleSynchronous(DeviceStateCallback, &state, HD_MIN_SCHEDULER_PRIORITY);
异步调用:立即返回(可以得到连续的值)
通常管理触觉循环,持久化表示触觉效果,每次迭代期间回调将效果应用于设备
例如
HDCallbackCode HDCALLBACK CoulombCallback(void *data)
{
HHD hHD = hdGetCurrentDevice();
hdBeginFrame(hHD);
HDdouble pos[3];
// 循环末端得到速度
hdGetDoublev(HD_CURRENT_POSITION,pos);
HDdouble force[3];
// 根据位置计算力
forceField(pos, force);
// 将力写入设备
hdSetDoublev(HD_CURRENT_FORCE, force);
// 清除力
hdEndFrame(hHD);
// 每帧执行
return HD_CALLBACK_CONTINUE;
}
hdScheduleAsynchronous(AForceSettingCallback, (void*)0, HD_DEFAULT_SCHEDULER_PRIORITY);
异步回调函数返回一个句柄,可以在将来用于对回调函数执行操作(取消调度回调,强行终止等)
例如
HDSchedulerHandle calibrationHandle = hdScheduleAsynchronous(aCallback, (void*)0, HD_MIN_SCHEDULER_PRIORITY);
hdStopScheduler();
hdUnschedule(calibrationHandle);
回调函数的优先级决定了在调度中的运行顺序。优先级高的先运行,相同的随机运行。
无论设备数量多少,都只运行一个调度程序线程。多个设备共享一个调度程序线程
4: 状态
1. 获取状态
可以通过使用hdGet系列函数检索设备状态和其它信息,例如hdGetDoublev(), hdGetIntegerv(),这些函数都需要有效的参数以及返回地址或者数组(保证数量一样大)
参数类型不是通用的,如果类型无效则返回HD_INVALID_INPUT_TYPE错误。
例如 HD_DEVICE_MODEL_TYPE 需要一个字符串而且只能被 hdGetString() 调用
CURRENT / LAST 状态指的是当前正在查询的帧或者上一帧的状态。如果在帧外面调用这两个状态则视为在前一帧内进行。(此时CURRENT返回上一帧,LAST返回上上帧)
例子
HDint buttonState;
HDstring vendor;
hduVector3Dd position;
HDfloat velocity[3];
HDdouble transform[16];
hdGetIntegerv(HD_CURRENT_BUTTONS,&buttonState);
hdGetString(HD_DEVICE_VENDOR,vendor);
hdGetDoublev(HD_CURRENT_POSITION,position);
hdGetFloatv(HD_CURRENT_VELOCITY,velocity);
hdGetDoublev(HD_LAST_ENDPOINT_TRANSFORM,transform);
通常应该在调度程序线程内,触觉帧中调用获取状态
2. 设置状态
设置状态应该在触控帧内完成,不支持笛卡尔力和 torques with motor DAC的混合
例如在HD_CURRENT_FORCE 和 HD_CURRENT_MOTOR_DAC_VALUES上调用 hdSetDoublev() 将导致错误
例如
HDdouble force[3] = {0.5, 0.0, 1.0};
hdSetDoublev(HD_CURRENT_FORCE,force);
HDfloat rampRate = .5;
hdSetFloatv(HD_FORCE_RAMPING_RATE,&rampRate);
注意
- 触觉帧结束前力不会发送到设备。
- 两次设置相同的状态将会用第二个替换第一个
- 如果累积力,可以使用一个私有变量或者重复使用 hdGet()/hdSet()
3. 状态同步
调度程序在线程之间提供状态同步功能。
考虑一个需要以伺服循环速率更新的状态,从另一个线程(图形线程)中访问或者修改。
一个实例是动态模拟位置的更新,根据伺服线程中运动的一些运动方程。
位置频繁发生变化,图形重绘函数随机地获取这些位置并绘制。
图形重绘期间,状态需要保持一致,因为图形线程速率(60Hz)比伺服线程速率(1000Hz)低得多。
下面的例子中,位置可能会在两次查询时发生变化
HDCallbackCode positionUpdateCallback(void *pUserData)
{
hduVector3Dd *position = (hduVector3Dd *)pUserData;
hdGetDoublev(HD_CURRENT_POSITION,*position);
return HD_CALLBACK_CONTINUE;
}
void func()
{
hduVector3Dd position;
hdScheduleAsynchronous(positionUpdateCallback,
position,
HD_DEFAULT_SCHEDULER_PRIORITY);
hduVector3Dd pos1 = position;
hduVector3Dd pos2 = position;
// 大概率下是不相等的
assert(pos1 == pos2);
}
5: 校准接口
校准允许设备保持物理位置的准确概念。例如校准之前,设备可能认为机械臂位于工作空间中心,但实际上机械臂已经发生偏离。
1. 校准类型
编码器硬件校准
Inkwell 校准
自动校准
2. 查询校准
由于每种设备校准形式不同,可以通过 HD_CALIBRATION_STYLE 查询所支持的校准类型。
对于前两种校准,除了提示用户将设备放入合适的位置外,还应该调用 hdUpdateCalibration() 一次。
自动校准则通过 HD_CALIBRATION_NEEDS_UPDATE 返回值进行更新,使用 hdCheckCalibration() 定期检查并通过 hdUpdateCalibration() 进行更新。
注意 也可以通过 PHANToM Test 校准设备。
3. 校准时机
由于校准可能导致设备位置跳跃,因此可以通过一些力检查或者禁用力来执行校准。
否则校准可能导致设备进入力感很大的位置(例如物体内部)
4. 调用校准
首先,用户应该从支持的样式列表中选择校准样式,因为某些设备可能支持多种类型的校准。
例如
HDint supportedCalibrationStyles;
hdGetIntegerv(HD_CALIBRATION_STYLE, &supportedCalibrationStyles);
if (supportedCalibrationStyles & HD_CALIBRATION_ENCODER_RESET)
{
calibrationStyleSupported = true;
}
if (supportedCalibrationStyles & HD_CALIBRATION_INKWELL)
{
calibrationStyleInkwellSupported = true;
}
if (supportedCalibrationStyles & HD_CALIBRATION_AUTO)
{
calibrationStyleAutoSupported = true;
}
// 接着定义回调函数用来检查校准
HDCallbackCode CalibrationStatusCallback (void *pUserData)
{
HDenum *pStatus = (HDenum *) pUserData;
hdBeginFrame(hdGetCurrentDevice());
*pStatus = hdCheckCalibration();
hdEndFrame(hdGetCurrentDevice());
return HD_CALLBACK_DONE;
}
// 例子:回调函数更新校准
HDCallbackCode UpdateCalibrationCallback (void *pUserData)
{
HDenum *calibrationStyle = (HDint *) pUserData;
if (hdCheckCalibration() == HD_CALIBRATION_NEEDS_UPDATE)
{
hdUpdateCalibration(*calibrationStyle);
}
return HD_CALLBACK_DONE;
}
6: 力/扭矩控制
PHANTOM 笛卡尔空间
所有 PHANToM 设备工作区间都在笛卡尔坐标系中,默认时
X轴指向 PHANToM 的右侧
Y轴指向 PHANToM 上方
Z轴指向 “out”, 朝向用户

PHANTOM 关节空间
关节1,关节2和关节3是有助于PHANTOM的X,Y和Z力的基础关节。
也就是说这三个关节决定6自由度中沿x, y, z三个直角坐标轴方向的移动自由度
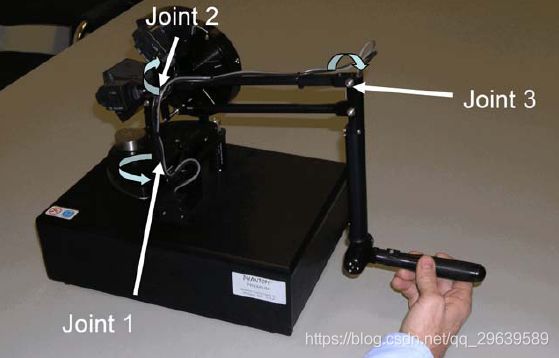
关节4,关节5和关节6是分别对应绕x, y, z这三个坐标轴的转动自由度。

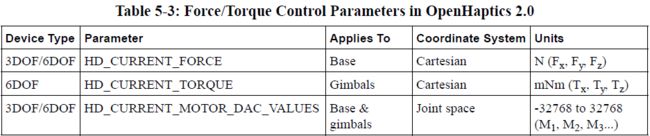

迪卡尔基本的力由hdSetFloatv()或者hdSetDoublev()设定,并将第一个参数设为HD_CURRENT_FORCE
HDfloat baseForce[3];
baseForce[0] = force_x;
baseForce[1] = force_y;
baseForce[2] = force_z;
hdSetFloatv(HD_CURRENT_FORCE, baseForce);
下面说明了在6DOF设备上左右关节扭矩值的典型用法
HDdouble baseTorque[3] = {100, 250, 200}; //Base Torque in mNm
hdSetDoublev(HD_CURRENT_JOINT_TORQUE, baseTorque);
HDdouble gimbalTorque[3] = {30, 65, 0.0}; //Gimbal Torque in mNm
hdSetDoublev(HD_CURRENT_GIMBAL_TORQUE, gimbalTorque);
7: Error Reporting and Handling
// 未完待续
/* Check if an error occurred while attempting to render the force */
if (HD_DEVICE_ERROR(error = hdGetError()))
{
if (hduIsForceError(&error))
{
bRenderForce = FALSE;
}
else if (hduIsSchedulerError(&error))
{
return HD_CALLBACK_DONE;
}
}
8: Cleanup
在应用程序退出之前,应该停止调度程序并终止所有调度程序的操作。回调函数可以通过 hdUnschedule() 终止,也可以通过知道返回 HD_CALLBACK_DONE 的回调本身终止。最后禁用设备
hdStopScheduler();
hdUnschedule(scheduleCallbackHandle);
hdDisableDevice(hdGetCurrentDevice());