- 研究周期光滑函数集合的导数积分性质,证明集合的闭区间性质和不等式的成立
weixin_30777913
算法
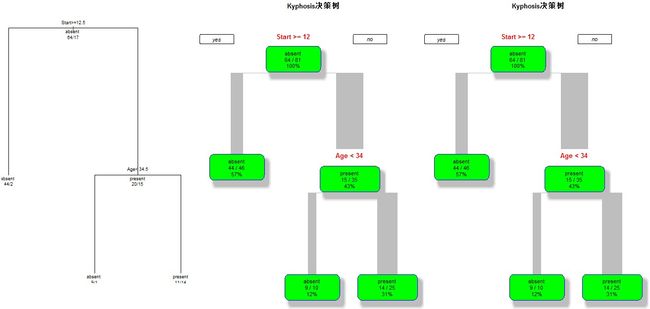
记BBB是所有定义在实轴R\mathbb{R}R上正的、以2π2\pi2π为周期并且满足如下条件f>0,∫02π(f′′(x))2dx≤1,∀f∈Bf>0,\int_{0}^{2\pi}(f^{''}(x))^{2}dx\leq1,\forallf\inBf>0,∫02π(f′′(x))2dx≤1,∀f∈B的光滑周期函数构成的集合。对k>0k>0k>0,记S(k)S(k)S(k)是所有满足条件su
- 分布式定时器:原理设计与技术挑战
你一身傲骨怎能输
架构设计分布式
文章摘要分布式定时器用于在分布式系统中可靠、准确地触发定时任务,常见实现方案包括:基于数据库/消息队列的定时扫描、分布式任务调度框架(如Quartz集群、xxl-job)、时间轮/延迟队列(如Redis/Kafka)以及Zookeeper/Etcd协调服务。主要技术挑战包括时钟同步、任务幂等、高可用、负载均衡和故障恢复等。核心难点在于保证任务唯一性、调度精度与分布式一致性,技术选型需权衡轻量级(R
- Java大视界:Java大数据在智能医疗电子健康档案数据挖掘与健康服务创新>
Loving_enjoy
计算机学科论文创新点人工智能深度学习迁移学习经验分享
>本文通过完整代码示例,揭秘如何用Java大数据技术挖掘电子健康档案价值,实现疾病预测、个性化健康管理等创新服务。###一、智能医疗时代的数据金矿电子健康档案(EHR)作为医疗数字化的核心载体,包含海量患者全生命周期健康数据。据统计,全球医疗数据量正以每年**48%的速度增长**,单个三甲医院年数据量可达**PB级**。这些数据蕴藏着疾病规律、治疗效能的宝贵知识,但传统技术难以有效挖掘。**Jav
- MySQL Online DDL详解:从历史演进到原理及使用
SHENKEM
mysql
本文介绍了MySQLOnlineDDL的发展历史,包括各个版本的改进,重点讲解了Copy和Inplace算法,以及OnlineDDL过程中的锁策略。还分析了DDL操作的需求、MySQL5.7和8.0的功能特点,以及使用限制和注意事项。摘要生成于C知道,由DeepSeek-R1满血版支持,前往体验>❃博主首页:「码到三十五」,同名公众号:「码到三十五」,wx号:「liwu0213」☠博主专栏:♝博主
- Python网络爬虫实现selenium对百度识图二次开发以及批量保存Excel
WeiJingYu.
python爬虫selenium
一.百度识图自动上传图片fromseleniumimportwebdriverfromselenium.webdriver.edge.optionsimportOptionsfromselenium.webdriver.common.byimportByedge_options=Options()edge_options.binary_location=r"C:\ProgramFiles(x86)
- 我的前端封装之路
最近有粉丝提问了我一个面试中遇到的问题,他说面试的时候,面试官问我:你在以前的项目中封装过组件吗?或者做过npm公共库吗?遇到过什么问题吗?当时自己突然觉得好像没什么可回答的啊,但面试结束想起来,自己在前端开发工作中貌似又在不停的封装东西。但因为没有提前准备这类问题,所以回答的不是很理想。这篇文章,我说一些我的封装工作历程,希望对大家有帮助吧。目录1那是一个日历组件1.1S1.2T1.3A1.4R
- 408数据结构强化(自用)
计算机筱贺
数据结构算法c语言
常用代码片段(持续更新)折半查找voidSearchBinary(intA[];intx){intlow=0,high=n-1,mid;while(low=mid)R--;A[L]=A[R];while(L=R)return;intM=huafen(A,L,R);Qsort(A,M+1,R);//右半部分快排Qsort(A,L,M-1);//左半部分快排}快速排序的划分思想//使用划分函数找到数组
- 高光谱相机(Hyperspectral Camera)
高光谱相机(HyperspectralCamera)高光谱相机:是一种可以采集连续、多达上百个窄波段的光谱信息的成像设备。它的核心特征是:每个像素点都拥有一个完整的光谱曲线,类似于“像素级别的光谱仪”。举例:普通彩色相机采集R/G/B(3个通道)多光谱相机采集~4–10个通道(如红光、绿光、红边、NIR)高光谱相机采集几十到几百个波段,每个波段宽度很窄(<10nm)高光谱vs多光谱:项目多光谱(M
- PPTMC第108次会议复盘(补发)
我是一只猫头鹰呀
2021年复盘NO.1--20210718PPTMC第108次会议复盘️✨角色:备稿演讲&拍照官✨O(信息):L1-2评估与反馈,备稿演讲,自己预定目标是自然、流畅地讲出来,结果讲到一半忘词了,中间跳过一段忘记发演讲目标和任务书给点评人海波老师✨R(感受):即使台下已经练的很熟练,在台上还是会紧张,只顾想稿子,忘记微笑和走动,底气不足✨I(启发):讲自己的故事,真诚、自然就好,不必完全拘泥于稿子✨
- Appium 简介
AIZHINAN
appium测试工具自动化测试
Appium是一个开源的移动应用自动化测试框架,用于测试原生应用(native)、混合应用(hybrid)和移动网页应用(mobileweb)。它支持iOS、Android和Windows平台。https://www.bilibili.com/video/BV1R93szkEhi/?App自动化测试:App测试Appium+UiAutomator2技巧、实战项目核心特点跨平台:同一套API可用于i
- 代码随想录算法训练营第二十二天
天天开心(∩_∩)
算法深度优先
LeetCode.77组合题目链接组合题解classSolution{List>result=newArrayListpath=newLinkedList>combine(intn,intk){dfs(n,k,1);returnresult;}publicvoiddfs(intn,intk,intcount){if(path.size()==k){result.add(newArrayList>r
- ARMv8架构
weizhideshenghuo
ARMarm
ARMarchitecturePE(processingelement):采取ARM架构的处理器RISC(reducedinstructionsetcomputer):精简指令集架构:AArch64:64位架构,地址和指令都是64位寄存器提供31个64位通用寄存器,X30用作过程链接寄存器提供1个64位程序计数器PC(programcounter),栈指针SPs(stackpointers),异常
- windows命令行查看硬盘序列号
用带有命令提示符的命令来显示硬盘驱动器的序列号。按下键盘上的"win+r"键打开"运行"窗口;输入"cmd"打开"命令提示符"窗口;1、在"命令提示符"窗口中输入"diskpart"后按下回车键;2、在弹出的窗口中输入"listdisk",再按下回车;3、输入"selectdisk0",如果你的电脑上装有多个硬盘那么就将0替换成别的序号;4、最后一步输入"detaildisk",按下回车后下方就会
- docker+gunicorn+gevent部署Django项目
间歇性不想努力
dockergunicorndjango
1、生成requiremesnts.txt文件执行pipfreeze>requirements.txt2、编写gunicorn-config.py文件frommultiprocessingimportcpu_countbind=["0.0.0.0:8521"]#daemon=Truepidfile='logs/gunicorn.pid'workers=cpu_count()*2wprker_cla
- 【时间管理】学习第57、58讲
太阳_9b53
NO.R7202Days29/497月29日晴家中【时间管理第57、58讲】1、年检视:年底做梦想版,年度目标在月度检视基础上做出。可在失败中得到更多启发,无论是好的或不好的,都不是最关键的。关键是我们如何去总结自己的成败得失。然后去做一个更适应自己的年度目标与计划。2、运动的意义只是健康吗:可以改善心肺、肌肉功能。我们往往不掌握技巧,时间管理的基础就是精历管理。平衡工作、睡眠、运动,运动可以使我
- yolov5推理简单代码(网上找了好多,最终找到了)
a2488220557
YOLO计算机视觉opencv
#yolov5#导包importtorchimportcv2frommultiprocessingimportProcess,Manager,Value#下面两个是yolov5文件夹里面的代码fromutils.generalimportnon_max_suppressionfrommodels.experimentalimportattempt_load#确保在进行对象检测时,边界框的位置可以与
- Matlab打开慢、加载慢的解决办法
RickyWasYoung
matlabwindows开发语言
安装完毕后直接打开会非常慢,而且打开了之后还得加载很久才能运行解决办法如下:1.找到路径“D:\ProgramFiles\Polyspace\R2020a\licenses”(我是把matlab安装在D盘了,如果是其他盘修改路径即可),该路径记为A2.复制该路径下的lic文件的名称“license_LAPTOP-XXXXXXXX_123456_R2020a.lic”(名称不同,找到这个文件就ok)
- Postman/Apipost中使用Post URL编码发送含换行符参数的问题分析
悟道|养家
postman测试工具
Postman/Apipost中使用PostURL编码发送含换行符参数的问题分析在使用Postman或Apipost等API测试工具进行POST请求时,当参数中包含换行符(\n或\r)通过UI界面复制参数时会遇到参数发送失效的问题。问题原因分析URL编码规范限制:x-www-form-urlencoded格式要求所有特殊字符(包括换行符)都必须进行百分号编码(URL编码)换行符(\n)在URL编码
- pip卸载指定文件夹的库
叶深深
pippython开发语言
要卸载指定文件夹中的库,可以使用pip卸载命令,并指定库的完整路径:pipuninstall-y-r/path/to/library其中,"-y"选项表示自动回答"yes",不询问确认;"-r"选项表示指定卸载清单文件。如果您想要卸载的库不在指定的文件夹中,可以使用以下命令:pipuninstall其中,""表示需要卸载的库名称。
- binwalk
白天的我最菜
错题本开发语言
windows使用这个命令时候发现要shift一直按住,右击打开cmd管理员运行才行pythonsetup.pyinstall否则没有作用自己安装python目录的Scripts文件夹里,参考如下https://www.cnblogs.com/0yst3r-2046/p/12218770.html
- sbatch: error: Batch script contains DOS line breaks (\r\n)
爱听许嵩歌
编程debug问题batchmatlabslurm
问题:在使用超算时,提交脚本出现batch:error:BatchscriptcontainsDOSlinebreaks(\r\n)sbatch:error:insteadofexpectedUNIXlinebreaks(\n)原因:dos下的换行和Unix是不一样的:windows中\r\n表示换行,linux等使用\n换行。差异:Windows系统下文本文件的换行符是:回车+换行CR/LF即\
- React源码6 三大核心模块之一:commit, finishConcurrentRender函数
gzzeason
ReactV18.2源码react.jsjavascript前端
Renderer工作的阶段在React内部被称为commit阶段。commit阶段流程图一、finishConcurrentRender函数functionfinishConcurrentRender(root,exitStatus,lanes){switch(exitStatus){caseRootInProgress:caseRootFatalErrored:{thrownewError('R
- 2019-02-10
轻尘_b215
R:[阅读社会]真正会休息的人,是如何度过假期的?I:假期本来是用来休息的,让们恢复疲劳,放松神经。但是长假后多数人的体验就是一个字一一累。为什么会是这样,皆因不懂得休息所致。体验心流是最好的休息方法,心流是人陶醉于所专注的事物,内心纯净安宁,超越现实,物我两忘,获得极大的放松和满足。减少刷手机,看电视等被动式休闲投入,主动式休闲,从事个人爱好、运动、阅读等容易产生心流。A1:春节长假期间读到这篇
- 复读机哪个牌子好,十大学习机品牌内部隐藏优惠券排行榜揭秘
古楼
复读机品牌排行榜-复读机内部隐藏优惠券哪个品牌好太爽了!揭秘!查看更多关于复读机品牌排行榜-复读机内部隐藏优惠券哪个品牌好太爽了!揭秘!的文章我在這裏特整理了10這合大學生的高顏值強性能復讀機學習機,在機身整體設計上並沒有增加厚度以尋求更好的散熱效果;而且拯救者R9000P2021的輕薄設計及精致的外觀打造特別符合現代年輕人的審美觀。聯想拯救者R9000P2021搭配16.1寸的2.5K高刷屏幕,
- 日入一词_85:in turn
cppUncleSix
BeforeusingCEF4DelphiwithanapplicationmadewithDelphiorLazarus/ˈlæzərəs/,it'snecessarytounderstandthatCEF4DelphiisawrapperthatusesCEF'sCAPIand,inturn,CEFinsulatestheuserfromtheunderlyingChromiumandBlin
- R语言金融工程:量化价值投资中的数据处理技巧
量化价值投资入门到精通
r语言金融开发语言ai
R语言金融工程:量化价值投资中的数据处理技巧关键词:R语言、金融工程、量化价值投资、数据处理、财务指标、时间序列、风险控制摘要:在量化价值投资领域,高质量的数据处理是策略有效性的核心基础。本文系统解析基于R语言的金融数据处理全流程,涵盖数据获取、清洗、特征工程、时间序列分析等关键环节。通过财务指标计算、异常值检测、缺失值处理、因子标准化等实用技巧,结合quantmod、TTR、dplyr等R包的深
- C#linq中的any方法解析
Linq中的any方法有那两个重载any()的方法主要功能是:判断是否为空、是否存在元素满足指定的条件。any()空参的方法作用:判断目标是否为空、是否包含元素。//声明一个int类型的数组int[]intA={1,2,3,4,5,6,7,8,9,10};//判断数组是否为空boolresultA=intA.Any();Console.WriteLine("intA数组使用any方法的结果:"+r
- STM32F103R6的Keil和Protues仿真-点亮LED灯
怎么就重名了
stm32嵌入式硬件单片机
STM32F103R6的Keil和Protues仿真-点亮LED灯STM32F103R6的Keil和Protues仿真-点亮LED灯1、效果1.1、低电平点亮1.2、高电平点亮2、代码2.1、Keil2.2、protueshttps://gitee.com/xiaolixi/l-stm32/tree/master/STM32Protues/diandeng-lowhttps://gitee.com
- 推荐文章:《同济大学软件学院万院长谈择业》
weixin_34087301
同济大学软件学院万院长谈择业一、关于企业计算方向企业计算(EnterpriseComputing)是稍时髦较好听的名词,主要是指企业信息系统,如ERP软件(企业资源规划)、CRM软件(客户关系管理)、SCM软件(供应链管理,即物流软件),银行证券软件,财务软件,电子商务/政务(包括各种网站),数据仓库,数据挖掘,商务智能等企业信息管理系统。企业计算领域对人才的需求显然永远是数量最大的,因为这是计算
- 计算机系毕业生的前途在哪(一个牛人对计算机系的阐述)
蚊子
嵌入式嵌入式操作系统wincelinux手机游戏j2me
值得未毕业的、刚毕业的、或想转行的朋友们揣摩参考。一、关于企业计算方向企业计算(EnterpriseComputing)是稍时髦较好听的名词,主要是指企业信息系统如:ERP软件(企业资源规划)、CRM软件(客户关系管理)、SCM软件(供应链管理,即物流软件),银行证券软件财务软件电子商务/政务(包括各种网站),数据仓库,数据挖掘,商务智能等企业信息管理系统。企业计算领域对人才的需求显然永远是数量最
- Java实现的简单双向Map,支持重复Value
superlxw1234
java双向map
关键字:Java双向Map、DualHashBidiMap
有个需求,需要根据即时修改Map结构中的Value值,比如,将Map中所有value=V1的记录改成value=V2,key保持不变。
数据量比较大,遍历Map性能太差,这就需要根据Value先找到Key,然后去修改。
即:既要根据Key找Value,又要根据Value
- PL/SQL触发器基础及例子
百合不是茶
oracle数据库触发器PL/SQL编程
触发器的简介;
触发器的定义就是说某个条件成立的时候,触发器里面所定义的语句就会被自动的执行。因此触发器不需要人为的去调用,也不能调用。触发器和过程函数类似 过程函数必须要调用,
一个表中最多只能有12个触发器类型的,触发器和过程函数相似 触发器不需要调用直接执行,
触发时间:指明触发器何时执行,该值可取:
before:表示在数据库动作之前触发
- [时空与探索]穿越时空的一些问题
comsci
问题
我们还没有进行过任何数学形式上的证明,仅仅是一个猜想.....
这个猜想就是; 任何有质量的物体(哪怕只有一微克)都不可能穿越时空,该物体强行穿越时空的时候,物体的质量会与时空粒子产生反应,物体会变成暗物质,也就是说,任何物体穿越时空会变成暗物质..(暗物质就我的理
- easy ui datagrid上移下移一行
商人shang
js上移下移easyuidatagrid
/**
* 向上移动一行
*
* @param dg
* @param row
*/
function moveupRow(dg, row) {
var datagrid = $(dg);
var index = datagrid.datagrid("getRowIndex", row);
if (isFirstRow(dg, row)) {
- Java反射
oloz
反射
本人菜鸟,今天恰好有时间,写写博客,总结复习一下java反射方面的知识,欢迎大家探讨交流学习指教
首先看看java中的Class
package demo;
public class ClassTest {
/*先了解java中的Class*/
public static void main(String[] args) {
//任何一个类都
- springMVC 使用JSR-303 Validation验证
杨白白
springmvc
JSR-303是一个数据验证的规范,但是spring并没有对其进行实现,Hibernate Validator是实现了这一规范的,通过此这个实现来讲SpringMVC对JSR-303的支持。
JSR-303的校验是基于注解的,首先要把这些注解标记在需要验证的实体类的属性上或是其对应的get方法上。
登录需要验证类
public class Login {
@NotEmpty
- log4j
香水浓
log4j
log4j.rootCategory=DEBUG, STDOUT, DAILYFILE, HTML, DATABASE
#log4j.rootCategory=DEBUG, STDOUT, DAILYFILE, ROLLINGFILE, HTML
#console
log4j.appender.STDOUT=org.apache.log4j.ConsoleAppender
log4
- 使用ajax和history.pushState无刷新改变页面URL
agevs
jquery框架Ajaxhtml5chrome
表现
如果你使用chrome或者firefox等浏览器访问本博客、github.com、plus.google.com等网站时,细心的你会发现页面之间的点击是通过ajax异步请求的,同时页面的URL发生了了改变。并且能够很好的支持浏览器前进和后退。
是什么有这么强大的功能呢?
HTML5里引用了新的API,history.pushState和history.replaceState,就是通过
- centos中文乱码
AILIKES
centosOSssh
一、CentOS系统访问 g.cn ,发现中文乱码。
于是用以前的方式:yum -y install fonts-chinese
CentOS系统安装后,还是不能显示中文字体。我使用 gedit 编辑源码,其中文注释也为乱码。
后来,终于找到以下方法可以解决,需要两个中文支持的包:
fonts-chinese-3.02-12.
- 触发器
baalwolf
触发器
触发器(trigger):监视某种情况,并触发某种操作。
触发器创建语法四要素:1.监视地点(table) 2.监视事件(insert/update/delete) 3.触发时间(after/before) 4.触发事件(insert/update/delete)
语法:
create trigger triggerName
after/before
- JS正则表达式的i m g
bijian1013
JavaScript正则表达式
g:表示全局(global)模式,即模式将被应用于所有字符串,而非在发现第一个匹配项时立即停止。 i:表示不区分大小写(case-insensitive)模式,即在确定匹配项时忽略模式与字符串的大小写。 m:表示
- HTML5模式和Hashbang模式
bijian1013
JavaScriptAngularJSHashbang模式HTML5模式
我们可以用$locationProvider来配置$location服务(可以采用注入的方式,就像AngularJS中其他所有东西一样)。这里provider的两个参数很有意思,介绍如下。
html5Mode
一个布尔值,标识$location服务是否运行在HTML5模式下。
ha
- [Maven学习笔记六]Maven生命周期
bit1129
maven
从mvn test的输出开始说起
当我们在user-core中执行mvn test时,执行的输出如下:
/software/devsoftware/jdk1.7.0_55/bin/java -Dmaven.home=/software/devsoftware/apache-maven-3.2.1 -Dclassworlds.conf=/software/devs
- 【Hadoop七】基于Yarn的Hadoop Map Reduce容错
bit1129
hadoop
运行于Yarn的Map Reduce作业,可能发生失败的点包括
Task Failure
Application Master Failure
Node Manager Failure
Resource Manager Failure
1. Task Failure
任务执行过程中产生的异常和JVM的意外终止会汇报给Application Master。僵死的任务也会被A
- 记一次数据推送的异常解决端口解决
ronin47
记一次数据推送的异常解决
需求:从db获取数据然后推送到B
程序开发完成,上jboss,刚开始报了很多错,逐一解决,可最后显示连接不到数据库。机房的同事说可以ping 通。
自已画了个图,逐一排除,把linux 防火墙 和 setenforce 设置最低。
service iptables stop
- 巧用视错觉-UI更有趣
brotherlamp
UIui视频ui教程ui自学ui资料
我们每个人在生活中都曾感受过视错觉(optical illusion)的魅力。
视错觉现象是双眼跟我们开的一个玩笑,而我们往往还心甘情愿地接受我们看到的假象。其实不止如此,视觉错现象的背后还有一个重要的科学原理——格式塔原理。
格式塔原理解释了人们如何以视觉方式感觉物体,以及图像的结构,视角,大小等要素是如何影响我们的视觉的。
在下面这篇文章中,我们首先会简单介绍一下格式塔原理中的基本概念,
- 线段树-poj1177-N个矩形求边长(离散化+扫描线)
bylijinnan
数据结构算法线段树
package com.ljn.base;
import java.util.Arrays;
import java.util.Comparator;
import java.util.Set;
import java.util.TreeSet;
/**
* POJ 1177 (线段树+离散化+扫描线),题目链接为http://poj.org/problem?id=1177
- HTTP协议详解
chicony
http协议
引言
- Scala设计模式
chenchao051
设计模式scala
Scala设计模式
我的话: 在国外网站上看到一篇文章,里面详细描述了很多设计模式,并且用Java及Scala两种语言描述,清晰的让我们看到各种常规的设计模式,在Scala中是如何在语言特性层面直接支持的。基于文章很nice,我利用今天的空闲时间将其翻译,希望大家能一起学习,讨论。翻译
- 安装mysql
daizj
mysql安装
安装mysql
(1)删除linux上已经安装的mysql相关库信息。rpm -e xxxxxxx --nodeps (强制删除)
执行命令rpm -qa |grep mysql 检查是否删除干净
(2)执行命令 rpm -i MySQL-server-5.5.31-2.el
- HTTP状态码大全
dcj3sjt126com
http状态码
完整的 HTTP 1.1规范说明书来自于RFC 2616,你可以在http://www.talentdigger.cn/home/link.php?url=d3d3LnJmYy1lZGl0b3Iub3JnLw%3D%3D在线查阅。HTTP 1.1的状态码被标记为新特性,因为许多浏览器只支持 HTTP 1.0。你应只把状态码发送给支持 HTTP 1.1的客户端,支持协议版本可以通过调用request
- asihttprequest上传图片
dcj3sjt126com
ASIHTTPRequest
NSURL *url =@"yourURL";
ASIFormDataRequest*currentRequest =[ASIFormDataRequest requestWithURL:url];
[currentRequest setPostFormat:ASIMultipartFormDataPostFormat];[currentRequest se
- C语言中,关键字static的作用
e200702084
C++cC#
在C语言中,关键字static有三个明显的作用:
1)在函数体,局部的static变量。生存期为程序的整个生命周期,(它存活多长时间);作用域却在函数体内(它在什么地方能被访问(空间))。
一个被声明为静态的变量在这一函数被调用过程中维持其值不变。因为它分配在静态存储区,函数调用结束后并不释放单元,但是在其它的作用域的无法访问。当再次调用这个函数时,这个局部的静态变量还存活,而且用在它的访
- win7/8使用curl
geeksun
win7
1. WIN7/8下要使用curl,需要下载curl-7.20.0-win64-ssl-sspi.zip和Win64OpenSSL_Light-1_0_2d.exe。 下载地址:
http://curl.haxx.se/download.html 请选择不带SSL的版本,否则还需要安装SSL的支持包 2. 可以给Windows增加c
- Creating a Shared Repository; Users Sharing The Repository
hongtoushizi
git
转载自:
http://www.gitguys.com/topics/creating-a-shared-repository-users-sharing-the-repository/ Commands discussed in this section:
git init –bare
git clone
git remote
git pull
git p
- Java实现字符串反转的8种或9种方法
Josh_Persistence
异或反转递归反转二分交换反转java字符串反转栈反转
注:对于第7种使用异或的方式来实现字符串的反转,如果不太看得明白的,可以参照另一篇博客:
http://josh-persistence.iteye.com/blog/2205768
/**
*
*/
package com.wsheng.aggregator.algorithm.string;
import java.util.Stack;
/**
- 代码实现任意容量倒水问题
home198979
PHP算法倒水
形象化设计模式实战 HELLO!架构 redis命令源码解析
倒水问题:有两个杯子,一个A升,一个B升,水有无限多,现要求利用这两杯子装C
- Druid datasource
zhb8015
druid
推荐大家使用数据库连接池 DruidDataSource. http://code.alibabatech.com/wiki/display/Druid/DruidDataSource DruidDataSource经过阿里巴巴数百个应用一年多生产环境运行验证,稳定可靠。 它最重要的特点是:监控、扩展和性能。 下载和Maven配置看这里: http
- 两种启动监听器ApplicationListener和ServletContextListener
spjich
javaspring框架
引言:有时候需要在项目初始化的时候进行一系列工作,比如初始化一个线程池,初始化配置文件,初始化缓存等等,这时候就需要用到启动监听器,下面分别介绍一下两种常用的项目启动监听器
ServletContextListener
特点: 依赖于sevlet容器,需要配置web.xml
使用方法:
public class StartListener implements
- JavaScript Rounding Methods of the Math object
何不笑
JavaScriptMath
The next group of methods has to do with rounding decimal values into integers. Three methods — Math.ceil(), Math.floor(), and Math.round() — handle rounding in differen