百度飞桨架构师手把手带你零基础实践深度学习——【第一周实践作业】
百度飞桨架构师手把手带你零基础实践深度学习——打卡计划
- 总目录
- 【第一周实践作业】
下面给出课程链接,欢迎各位小伙来来报考!本帖将持续更新。我只是飞桨的搬运工

话不多说,这么良心的课程赶快扫码上车!https://aistudio.baidu.com/aistudio/education/group/info/1297?activityId=5&directly=1&shared=1
总目录
【第一周实践作业】
项目地址
import os
import random
import paddle
import paddle.fluid as fluid
from paddle.fluid.dygraph.nn import Conv2D, Pool2D, Linear
import numpy as np
from PIL import Image
import gzip
import json
train_data=paddle.dataset.mnist.train()
test_data=paddle.dataset.mnist.test()
train_data=paddle.reader.shuffle(train_data,100)
test_data=paddle.reader.shuffle(test_data,100)
train_data=paddle.batch(train_data,100)
test_data=paddle.batch(test_data,100)
class MNIST(fluid.dygraph.Layer):
def __init__(self):
super(MNIST, self).__init__()
# 定义一个卷积层,使用relu激活函数
self.conv1 = Conv2D(num_channels=1, num_filters=20, filter_size=5, stride=1, padding=2, act='relu')
# 定义一个池化层,池化核为2,步长为2,使用最大池化方式
self.pool1 = Pool2D(pool_size=2, pool_stride=2, pool_type='max')
# 定义一个卷积层,使用relu激活函数
self.conv2 = Conv2D(num_channels=20, num_filters=20, filter_size=5, stride=1, padding=2, act='relu')
# 定义一个池化层,池化核为2,步长为2,使用最大池化方式
self.pool2 = Pool2D(pool_size=2, pool_stride=2, pool_type='max')
# 定义一个全连接层,输出节点数为10
self.fc = Linear(input_dim=980, output_dim=10, act='softmax')
# 定义网络的前向计算过程
def forward(self, inputs, label):
x = self.conv1(inputs)
x = self.pool1(x)
x = self.conv2(x)
x = self.pool2(x)
x = fluid.layers.reshape(x, [x.shape[0], 980])
x = self.fc(x)
if label is not None:
acc = fluid.layers.accuracy(input=x, label=label)
return x, acc
else:
return x
use_gpu = True
place = fluid.CUDAPlace(0) if use_gpu else fluid.CPUPlace()
from visualdl import LogWriter
log_writer = LogWriter(logdir="./log")
with fluid.dygraph.guard(place):
model = MNIST()
model.train()
iter = 0
EPOCH_NUM = 5
BATCH_SIZE = 100
# 定义学习率,并加载优化器参数到模型中
total_steps = (int(60000//BATCH_SIZE) + 1) * EPOCH_NUM
lr = fluid.dygraph.PolynomialDecay(0.01, total_steps, 0.001)
# 使用Adam优化器
optimizer = fluid.optimizer.AdamOptimizer(learning_rate=lr, parameter_list=model.parameters())
for epoch_id in range(EPOCH_NUM):
for batch_id, data in enumerate(train_data()):
#准备数据,变得更加简洁
img_data = np.array([x[0] for x in data]).astype('float32').reshape(-1,1,28,28)
# 获得图像标签数据,并转为float32类型的数组
label_data = np.array([x[1] for x in data]).astype('int64').reshape(-1, 1)
image = fluid.dygraph.to_variable(img_data)
label = fluid.dygraph.to_variable(label_data)
#前向计算的过程,同时拿到模型输出值和分类准确率
predict, acc = model(image, label)
avg_acc = fluid.layers.mean(acc)
#计算损失,取一个批次样本损失的平均值
loss = fluid.layers.cross_entropy(predict, label)
avg_loss = fluid.layers.mean(loss)
#每训练了200批次的数据,打印下当前Loss的情况
if batch_id % 200 == 0:
print("epoch: {}, batch: {}, loss is: {}, acc is {}".format(epoch_id, batch_id, avg_loss.numpy(),avg_acc.numpy()))
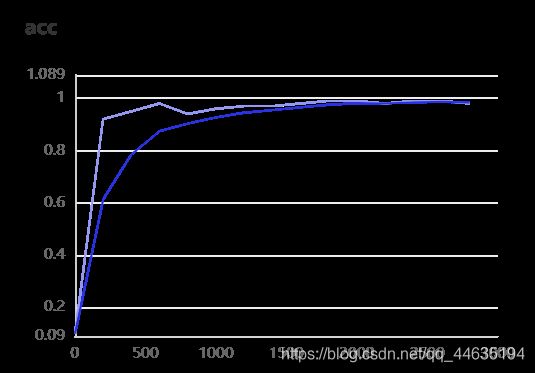
log_writer.add_scalar(tag = 'acc', step = iter, value = avg_acc.numpy())
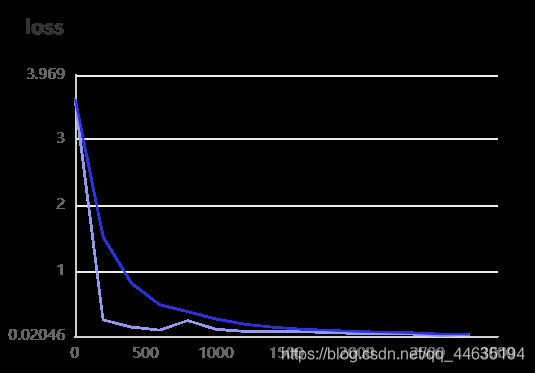
log_writer.add_scalar(tag = 'loss', step = iter, value = avg_loss.numpy())
iter = iter + 200
#后向传播,更新参数的过程
avg_loss.backward()
optimizer.minimize(avg_loss)
model.clear_gradients()
# 保存模型参数和优化器的参数
fluid.save_dygraph(model.state_dict(), './checkpoint/mnist_epoch{}'.format(epoch_id))
fluid.save_dygraph(optimizer.state_dict(), './checkpoint/mnist_epoch{}'.format(epoch_id))
开始快乐炼丹吧!
最终效果
with fluid.dygraph.guard():
print('start evaluation .......')
#加载模型参数
model = MNIST()
model_state_dict, _ = fluid.load_dygraph('checkpoint/mnist_epoch4.pdopt')
model.load_dict(model_state_dict)
model.eval()
acc_set = []
avg_loss_set = []
for batch_id, data in enumerate(test_data()):
x_data = np.array([x[0] for x in data]).astype('float32').reshape(-1,1,28,28)
# 获得图像标签数据,并转为float32类型的数组
y_data = np.array([x[1] for x in data]).astype('int64').reshape(-1, 1)
img = fluid.dygraph.to_variable(x_data)
label = fluid.dygraph.to_variable(y_data)
prediction, acc = model(img, label)
loss = fluid.layers.cross_entropy(input=prediction, label=label)
avg_loss = fluid.layers.mean(loss)
acc_set.append(float(acc.numpy()))
avg_loss_set.append(float(avg_loss.numpy()))
#计算多个batch的平均损失和准确率
acc_val_mean = np.array(acc_set).mean()
avg_loss_val_mean = np.array(avg_loss_set).mean()
print('loss={}, acc={}'.format(avg_loss_val_mean, acc_val_mean))

模型性能良好