David silver 强化学习公开课笔记(二):MP、MRP、MDP
1 引言
1.1 Markov 的性质
正如上一节课提到的,Markov 状态表示当前的状态包括了历史所有的信息,也就是给定当前状态,未来和历史是独立的。通俗的说就是未来只和现在有关,和过去是没有关系的!其实也不能说和过去是没有关系,而是现在状态包括了所有的历史。有点绕。。还是看下面的定义式:

所有的 RL 的问题都能表示为一个 MDP。关于什么是 MDP,下面再说。
1.2 状态转移矩阵
从状态 s 转移到状态 s' 的定义式为:

状态转移矩阵为:

其中每一行的和为1。
1.3 马尔科夫过程(马尔科夫链)
一系列状态所组成的序列,是一个元祖

2 Markov Reward Process
2.1 MRP
在马尔科夫链的基础上增加了奖赏 reward 和折扣因子  。其中 reward 为进入某个状态后得到的奖赏,折扣因子的作用是表示未来的 reward 对当前的动作所带来的收益,折扣因子越大则未来的 reward 对当前的动作影响越大,具体公式在2.2将会介绍。先看 PPT 中的定义式:
。其中 reward 为进入某个状态后得到的奖赏,折扣因子的作用是表示未来的 reward 对当前的动作所带来的收益,折扣因子越大则未来的 reward 对当前的动作影响越大,具体公式在2.2将会介绍。先看 PPT 中的定义式:

2.2 Return
Return  表示一个马尔科夫过程中 t 时刻的状态所能得到的总奖赏。注意是针对一个特定的 MP 而言的,这里还不考虑动作,不同的 MP 算出来的 不一样。
表示一个马尔科夫过程中 t 时刻的状态所能得到的总奖赏。注意是针对一个特定的 MP 而言的,这里还不考虑动作,不同的 MP 算出来的 不一样。

2.3 Value Function(值函数)
其实就是 ,表示一个状态的好坏的一个值,值越大说明这个状态越好,也就意味着以后有更大的概率可以获得更多的 reward。
注意:这里的值函数表示的是状态值函数,及表示一个状态的好坏,而非动作的好坏。

2.4 贝尔曼方程
一看公式就知道了,其实就是原有的 要一直向后加,但是实际上只需要当前的 reward 加上下一个状态的值函数就OK了。
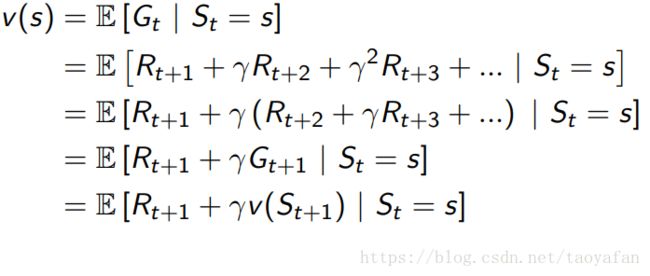
至于下一个状态的值函数怎么求,通过状态转移矩阵,求期望的可以了:

贝尔曼方程的矩阵形式:

简写为:
![]()
贝尔曼方程其实可以解出来的,只是需要求一个矩阵的逆,复杂度为O( ),只适用于小的 MRP:
),只适用于小的 MRP:

当然也有迭代法,如:
(1)Dynamic programming
(2)Monte-Carlo evaluation
(3)Temporal-Difference learning
这些在以后的课程都会提到。
3 Markov Decision Process(马尔科夫决策过程)
这个才是最重要的,毕竟强化学习里面是不能不考虑 agent 的动作的,所以这也就是 MDP 和 MRP 的区别,多一个 A (action),而状态转移矩阵 p 和 reward 也多了一个a。
注意:
(1)MRP 的 reward 是进入一个状态得到的,而 MDP 的 reward 是执行一个动作得到的。
(2)MRP 的 P 是一个状态转换到另一个状态的概率,而 MDP 中的 P 是一个状态执行一个动作后转换到另一个状态的概率,因为实际应用中,由于环境的影响,执行一个动作得到的结果并不是一定的,也是以概率形式存在的。

3.1 policy
中文名曰(yue)策略函数,agent 执行什么样的 action 就是由 policy 决定的:

MDP 中策略之和当前的状态有关,与历史的状态无关。
3.2 值函数
这里有两个值函数,一个是状态值函数,一个是动作值函数,不过这里的状态值函数与 MRP 中的也有所不同,MRP 中的值函数与策略无关,完全又状态转移矩阵决定,而这里的值函数都是与策略有关的。动作值函数的意义为在某一状态,执行某一个动作,并根据当前的策略执行后续的动作,所得到的期望 return。两个值函数的定义式如下:

3.3 贝尔曼期望方程
这里与MRP那里类似,状态值函数为:

动作值函数为:

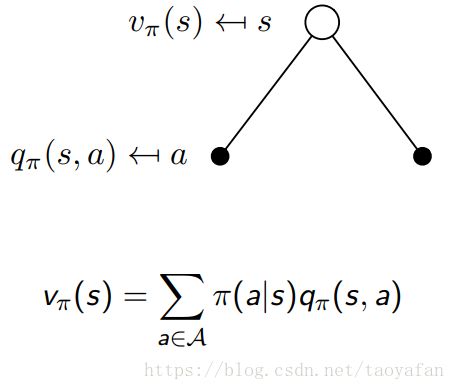
初学可能不容易理解两个函数的关系,这里 PPT 上介绍的比较好,首先是根据 q 计算 v:
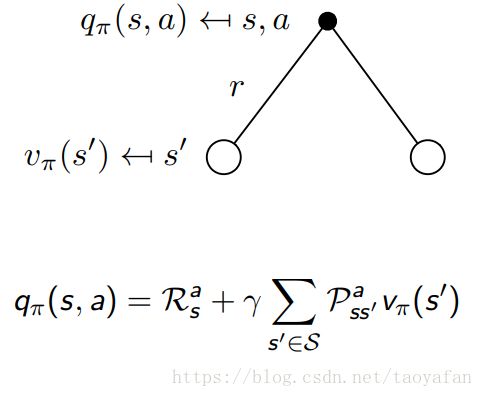
其次是根据 v 计算 q:
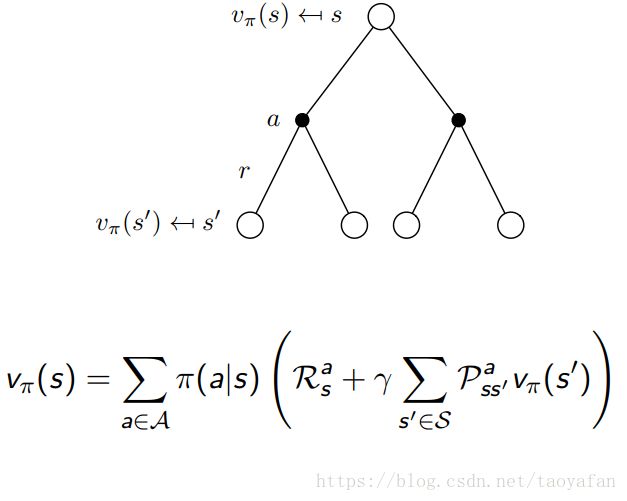
接着是根据 v 计算 v:
最后是根据 q 计算 q:

同样可以写成矩阵形式:
![]()
有代数解:

3.4 最优值函数
也就是选择最优的策略,使得值函数最大:


3.5 最优策略
策略的好坏由值函数决定,值函数越大,说明策略越好:

对于一个 MDP 存在一个(些)最优策略,比所有的其他策略都好,这些最优策略可以达到最优的状态值函数和动作值函数。
最优策略也很容易寻找,原理是找到动作 a 可以使得动作值函数最大,将这个动作的概率设为1,其他动作设为0:

3.6 贝尔曼最优方程
与贝尔曼期望方程类似,只不过不是求期望了,而是求最大值。




3.7 解贝尔曼最优方程
贝尔曼最优方程是非线性的,所以不能直接解出,有很多迭代解:
(1)Value Iteration
(2)Policy Iteration
(3)Q-learning
(4)Sarsa
4 扩展
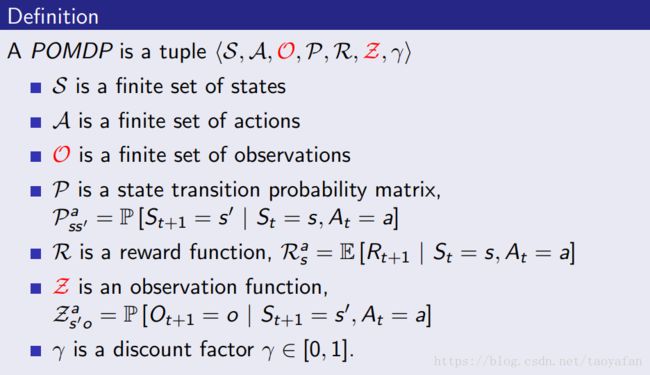
4.1 POMDPs
A Partially Observable Markov Decision Process is an MDP with hidden states. It is a hidden Markov model with actions.定义如下
4.2 Belief States
没找到中文怎么翻译,姑且叫做信息状态吧,表示根据历史的观测得到当前的状态分布,历史的定义如下:

信息状态的定义如下:
