我们将使用残差网络建立一个很深的卷积神经网络,理论上而言越深的网络可以表示更加复杂的函数,但是训练也更加困难。Residual Networks可以让我们训练更深的网络。
import numpy as np
from keras import layers
from keras.layers import Input, Add, Dense, Activation, ZeroPadding2D, BatchNormalization, Flatten, Conv2D, AveragePooling2D, MaxPooling2D, GlobalMaxPooling2D
from keras.models import Model, load_model
from keras.preprocessing import image
from keras.utils import layer_utils
from keras.utils.data_utils import get_file
from keras.applications.imagenet_utils import preprocess_input
import pydot
from IPython.display import SVG
from keras.utils.vis_utils import model_to_dot
from keras.utils import plot_model
from resnets_utils import *
from keras.initializers import glorot_uniform
import scipy.misc
from matplotlib.pyplot import imshow
%matplotlib inline
import keras.backend as K
K.set_image_data_format('channels_last')
K.set_learning_phase(1)
1 - The problem of very deep neural networks
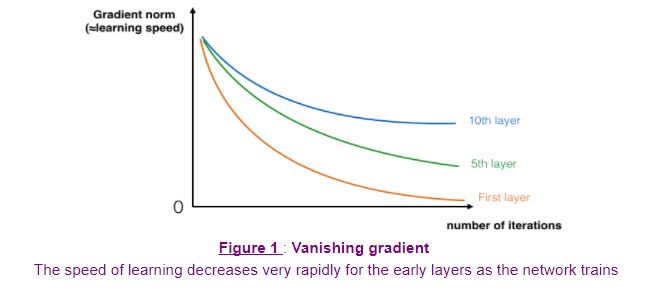
The main benefit of a very deep network is that it can represent very complex functions. It can also learn features at many different levels of abstraction, from edges (at the lower layers) to very complex features (at the deeper layers). However, using a deeper network doesn't always help. A huge barrier to training them is vanishing gradients: very deep networks often have a gradient signal that goes to zero quickly, thus making gradient descent unbearably slow. More specifically, during gradient descent, as you backprop from the final layer back to the first layer, you are multiplying by the weight matrix on each step, and thus the gradient can decrease exponentially quickly to zero (or, in rare cases, grow exponentially quickly and "explode" to take very large values).
During training, you might therefore see the magnitude (or norm) of the gradient for the earlier layers descrease to zero very rapidly as training proceeds:
2 - Building a Residual Network
In ResNets, a "shortcut" or a "skip connection" allows the gradient to be directly backpropagated to earlier layers:
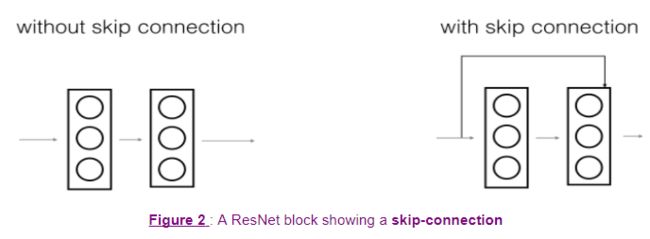
The image on the left shows the "main path" through the network. The image on the right adds a shortcut to the main path. By stacking these ResNet blocks on top of each other, you can form a very deep network.
We also saw in lecture that having ResNet blocks with the shortcut also makes it very easy for one of the blocks to learn an identity function. This means that you can stack on additional ResNet blocks with little risk of harming training set performance. (There is also some evidence that the ease of learning an identity function--even more than skip connections helping with vanishing gradients--accounts for ResNets' remarkable performance.) ..
Two main types of blocks are used in a ResNet, depending mainly on whether the input/output dimensions are same or different. You are going to implement both of them.
2.1 - The identity block
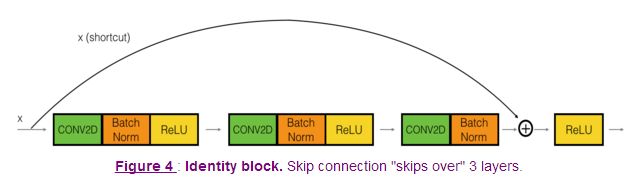
The identity block is the standard block used in ResNets, and corresponds to the case where the input activation (say a[l] ) has the same dimension as the output activation (say a[l+2]). To flesh out the different steps of what happens in a ResNet's identity block, here is an alternative diagram showing the individual steps:

The upper path is the "shortcut path." The lower path is the "main path." In this diagram, we have also made explicit the CONV2D and ReLU steps in each layer. To speed up training we have also added a BatchNorm step. Don't worry about this being complicated to implement--you'll see that BatchNorm is just one line of code in Keras!
In this exercise, you'll actually implement a slightly more powerful version of this identity block, in which the skip connection "skips over" 3 hidden layers rather than 2 layers. It looks like this:
Here're the individual steps.
First component of main path:
- The first CONV2D has F1 filters of shape (1,1) and a stride of (1,1). Its padding is "valid" and its name should be
conv_name_base+ '2a'. Use 0 as the seed for the random initialization. - The first BatchNorm is normalizing the channels axis. Its name should be
bn_name_base+ '2a'. - Then apply the ReLU activation function. This has no name and no hyperparameters.
Second component of main path:
- The second CONV2D has F2filters of shape (f,f) and a stride of (1,1). Its padding is "same" and its name should be
conv_name_base+ '2b'. Use 0 as the seed for the random initialization. - The second BatchNorm is normalizing the channels axis. Its name should be
bn_name_base+ '2b'. - Then apply the ReLU activation function. This has no name and no hyperparameters.
Third component of main path:
- The third CONV2D has F3 filters of shape (1,1) and a stride of (1,1). Its padding is "valid" and its name should be
conv_name_base+ '2c'. Use 0 as the seed for the random initialization. - The third BatchNorm is normalizing the channels axis. Its name should be
bn_name_base+ '2c'. Note that there is no ReLU activation function in this component.
Final step:
- The shortcut and the input are added together.
- Then apply the ReLU activation function. This has no name and no hyperparameters.
Exercise: Implement the ResNet identity block. We have implemented the first component of the main path. Please read over this carefully to make sure you understand what it is doing. You should implement the rest.
- To implement the Conv2D step: See reference
- To implement BatchNorm: See reference (axis: Integer, the axis that should be normalized (typically the channels axis))
- For the activation, use:
Activation('relu')(X) - To add the value passed forward by the shortcut: See reference
def identity_block(X, f, filters, stage, block):
"""
Implementation of the identity block as defined in Figure 3
Arguments:
X -- input tensor of shape (m, n_H_prev, n_W_prev, n_C_prev)
f -- integer, specifying the shape of the middle CONV's window for the main path
filters -- python list of integers, defining the number of filters in the CONV layers of the main path
stage -- integer, used to name the layers, depending on their position in the network
block -- string/character, used to name the layers, depending on their position in the network
Returns:
X -- output of the identity block, tensor of shape (n_H, n_W, n_C)
"""
# defining name basis
conv_name_base = 'res' + str(stage) + block + '_branch'
bn_name_base = 'bn' + str(stage) + block + '_branch'
# Retrieve Filters
F1, F2, F3 = filters
# Save the input value. You'll need this later to add back to the main path.
X_shortcut = X
# First component of main path
X = Conv2D(filters = F1, kernel_size = (1, 1), strides = (1,1), padding = 'valid', name = conv_name_base + '2a', kernel_initializer = glorot_uniform(seed=0))(X)
X = BatchNormalization(axis = 3, name = bn_name_base + '2a')(X)
X = Activation('relu')(X)
### START CODE HERE ###
# Second component of main path (≈3 lines)
X = Conv2D(filters = F2, kernel_size = (f, f), strides = (1,1), padding = 'same', name = conv_name_base + '2b', kernel_initializer = glorot_uniform(seed=0))(X)
X = BatchNormalization(axis = 3, name = bn_name_base + '2b')(X)
X = Activation('relu')(X)
# Third component of main path (≈2 lines)
X = Conv2D(filters = F3, kernel_size = (1, 1), strides = (1,1), padding = 'valid', name = conv_name_base + '2c', kernel_initializer = glorot_uniform(seed=0))(X)
X = BatchNormalization(axis = 3, name = bn_name_base + '2c')(X)
# Final step: Add shortcut value to main path, and pass it through a RELU activation (≈2 lines)
X = Add()([X, X_shortcut])
X = Activation('relu')(X)
### END CODE HERE ###
return X
2.2 - The convolutional block
You've implemented the ResNet identity block. Next, the ResNet "convolutional block" is the other type of block. You can use this type of block when the input and output dimensions don't match up. The difference with the identity block is that there is a CONV2D layer in the shortcut path:
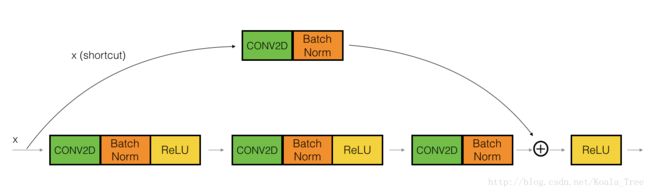
The CONV2D layer in the shortcut path is used to resize the input x to a different dimension, so that the dimensions match up in the final addition needed to add the shortcut value back to the main path. (This plays a similar role as the matrix Ws discussed in lecture.) For example, to reduce the activation dimensions's height and width by a factor of 2, you can use a 1x1 convolution with a stride of 2. The CONV2D layer on the shortcut path does not use any non-linear activation function. Its main role is to just apply a (learned) linear function that reduces the dimension of the input, so that the dimensions match up for the later addition step
The details of the convolutional block are as follows
First component of main path:
- The first CONV2D has F1 filters of shape (1,1) and a stride of (s,s). Its padding is "valid" and its name should be
conv_name_base + '2a'. - The first BatchNorm is normalizing the channels axis. Its name should be
bn_name_base + '2a'. - Then apply the ReLU activation function. This has no name and no hyperparameters.
Second component of main path:
- The second CONV2D has F2 filters of (f,f) and a stride of (1,1). Its padding is "same" and it's name should be
conv_name_base + '2b'. - The second BatchNorm is normalizing the channels axis. Its name should be
bn_name_base + '2b'. - Then apply the ReLU activation function. This has no name and no hyperparameters.
Third component of main path:
- The third CONV2D has F3 filters of (1,1) and a stride of (1,1). Its padding is "valid" and it's name should be
conv_name_base + '2c'. - The third BatchNorm is normalizing the channels axis. Its name should be
bn_name_base + '2c'. Note that there is no ReLU activation function in this component.
Shortcut path:
- The CONV2D has F3 filters of shape (1,1) and a stride of (s,s). Its padding is "valid" and its name should be
conv_name_base + '1'. - The BatchNorm is normalizing the channels axis. Its name should be
bn_name_base + '1'.
Final step:
- The shortcut and the main path values are added together.
- Then apply the ReLU activation function. This has no name and no hyperparameters.
- Conv Hint
- BatchNorm Hint (axis: Integer, the axis that should be normalized (typically the features axis))
- For the activation, use:
Activation('relu')(X) - Addition Hint
3 - Building your first ResNet model (50 layers)
You now have the necessary blocks to build a very deep ResNet. The following figure describes in detail the architecture of this neural network. "ID BLOCK" in the diagram stands for "Identity block," and "ID BLOCK x3" means you should stack 3 identity blocks together.
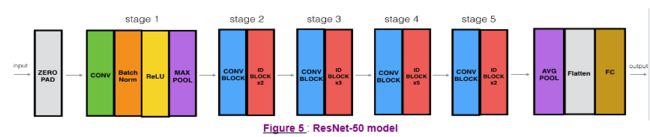
The details of this ResNet-50 model are:
- Zero-padding pads the input with a pad of (3,3)
- Stage 1:
- The 2D Convolution has 64 filters of shape (7,7) and uses a stride of (2,2). Its name is "conv1".
- BatchNorm is applied to the channels axis of the input.
- MaxPooling uses a (3,3) window and a (2,2) stride.
- Stage 2:
- The convolutional block uses three set of filters of size [64,64,256], "f" is 3, "s" is 1 and the block is "a".
- The 2 identity blocks use three set of filters of size [64,64,256], "f" is 3 and the blocks are "b" and "c".
- Stage 3:
- The convolutional block uses three set of filters of size [128,128,512], "f" is 3, "s" is 2 and the block is "a".
- The 3 identity blocks use three set of filters of size [128,128,512], "f" is 3 and the blocks are "b", "c" and "d".
- Stage 4:
- The convolutional block uses three set of filters of size [256, 256, 1024], "f" is 3, "s" is 2 and the block is "a".
- The 5 identity blocks use three set of filters of size [256, 256, 1024], "f" is 3 and the blocks are "b", "c", "d", "e" and "f".
- Stage 5:
- The convolutional block uses three set of filters of size [512, 512, 2048], "f" is 3, "s" is 2 and the block is "a".
- The 2 identity blocks use three set of filters of size [512, 512, 2048], "f" is 3 and the blocks are "b" and "c".
- The 2D Average Pooling uses a window of shape (2,2) and its name is "avg_pool".
- The flatten doesn't have any hyperparameters or name.
- The Fully Connected (Dense) layer reduces its input to the number of classes using a softmax activation. Its name should be
'fc' + str(classes).
You'll need to use this function:
- Average pooling see reference
Here're some other functions we used in the code below:
- Conv2D: See reference
- BatchNorm: See reference (axis: Integer, the axis that should be normalized (typically the features axis))
- Zero padding: See reference
- Max pooling: See reference
- Fully conected layer: See reference
- Addition: See reference
# GRADED FUNCTION: ResNet50
def ResNet50(input_shape = (64, 64, 3), classes = 6):
"""
Implementation of the popular ResNet50 the following architecture:
CONV2D -> BATCHNORM -> RELU -> MAXPOOL -> CONVBLOCK -> IDBLOCK*2 -> CONVBLOCK -> IDBLOCK*3
-> CONVBLOCK -> IDBLOCK*5 -> CONVBLOCK -> IDBLOCK*2 -> AVGPOOL -> TOPLAYER
Arguments:
input_shape -- shape of the images of the dataset
classes -- integer, number of classes
Returns:
model -- a Model() instance in Keras
"""
# Define the input as a tensor with shape input_shape
X_input = Input(input_shape)
# Zero-Padding
X = ZeroPadding2D((3, 3))(X_input)
# Stage 1
X = Conv2D(64, (7, 7), strides = (2, 2), name = 'conv1', kernel_initializer = glorot_uniform(seed=0))(X)
X = BatchNormalization(axis = 3, name = 'bn_conv1')(X)
X = Activation('relu')(X)
X = MaxPooling2D((3, 3), strides=(2, 2))(X)
# Stage 2
X = convolutional_block(X, f = 3, filters = [64, 64, 256], stage = 2, block='a', s = 1)
X = identity_block(X, 3, [64, 64, 256], stage=2, block='b')
X = identity_block(X, 3, [64, 64, 256], stage=2, block='c')
### START CODE HERE ###
# Stage 3 (≈4 lines)
X = convolutional_block(X, f = 3, filters = [128, 128, 512], stage = 3, block='a', s = 2)
X = identity_block(X, 3, [128, 128, 512], stage=3, block='b')
X = identity_block(X, 3, [128, 128, 512], stage=3, block='c')
X = identity_block(X, 3, [128, 128, 512], stage=3, block='d')
# Stage 4 (≈6 lines)
X = convolutional_block(X, f = 3, filters = [256, 256, 1024], stage = 4, block='a', s = 2)
X = identity_block(X, 3, [256, 256, 1024], stage=4, block='b')
X = identity_block(X, 3, [256, 256, 1024], stage=4, block='c')
X = identity_block(X, 3, [256, 256, 1024], stage=4, block='d')
X = identity_block(X, 3, [256, 256, 1024], stage=4, block='e')
X = identity_block(X, 3, [256, 256, 1024], stage=4, block='f')
# Stage 5 (≈3 lines)
X = convolutional_block(X, f = 3, filters = [512, 512, 2048], stage =5, block='a', s = 2)
X = identity_block(X, 3, [512, 512,2048], stage=5, block='b')
X = identity_block(X, 3, [512, 512,2048], stage=5, block='c')
# AVGPOOL (≈1 line). Use "X = AveragePooling2D(...)(X)"
X = AveragePooling2D(pool_size=(2, 2), name = 'avg_pool')(X)
### END CODE HERE ###
# output layer
X = Flatten()(X)
X = Dense(classes, activation='softmax', name='fc' + str(classes), kernel_initializer = glorot_uniform(seed=0))(X)
# Create model
model = Model(inputs = X_input, outputs = X, name='ResNet50')
return model
Run the following code to build the model's graph. If your implementation is not correct you will know it by checking your accuracy when running model.fit(...) below.
model = ResNet50(input_shape = (64, 64, 3), classes = 6)
As seen in the Keras Tutorial Notebook, prior training a model, you need to configure the learning process by compiling the model.
model.compile(optimizer='adam', loss='categorical_crossentropy', metrics=['accuracy'])
The model is now ready to be trained. The only thing you need is a dataset.
Let's load the SIGNS Dataset.

X_train_orig, Y_train_orig, X_test_orig, Y_test_orig, classes = load_dataset()
# Normalize image vectors
X_train = X_train_orig/255.
X_test = X_test_orig/255.
# Convert training and test labels to one hot matrices
Y_train = convert_to_one_hot(Y_train_orig, 6).T
Y_test = convert_to_one_hot(Y_test_orig, 6).T
print ("number of training examples = " + str(X_train.shape[0]))
print ("number of test examples = " + str(X_test.shape[0]))
print ("X_train shape: " + str(X_train.shape))
print ("Y_train shape: " + str(Y_train.shape))
print ("X_test shape: " + str(X_test.shape))
print ("Y_test shape: " + str(Y_test.shape))
number of training examples = 1080
number of test examples = 120
X_train shape: (1080, 64, 64, 3)
Y_train shape: (1080, 6)
X_test shape: (120, 64, 64, 3)
Y_test shape: (120, 6)
Run the following cell to train your model on 2 epochs with a batch size of 32. On a CPU it should take you around 5min per epoch.
model.fit(X_train, Y_train, epochs = 2, batch_size = 32)
Let's see how this model (trained on only two epochs) performs on the test set.
preds = model.evaluate(X_test, Y_test)
print ("Loss = " + str(preds[0]))
print ("Test Accuracy = " + str(preds[1]))
Using a GPU, we've trained our own ResNet50 model's weights on the SIGNS dataset. You can load and run our trained model on the test set in the cells below. It may take ≈1min to load the model
model = load_model('ResNet50.h5')
preds = model.evaluate(X_test, Y_test)
print ("Loss = " + str(preds[0]))
print ("Test Accuracy = " + str(preds[1]))
4 - Test on your own image
img_path = 'images/my_image.jpg'
img = image.load_img(img_path, target_size=(64, 64))
x = image.img_to_array(img) / 255
x = np.expand_dims(x, axis=0)
#x = preprocess_input(x)
print('Input image shape:', x.shape)
my_image = scipy.misc.imread(img_path)
imshow(my_image)
print("class prediction vector [p(0), p(1), p(2), p(3), p(4), p(5)] = ")
print(model.predict(x))
You can also print a summary of your model by running the following code.
model.summary()
plot_model(model, to_file='model.png') SVG(model_to_dot(model).create(prog='dot', format='svg'))
What you should remember:
- Very deep "plain" networks don't work in practice because they are hard to train due to vanishing gradients.
- The skip-connections help to address the Vanishing Gradient problem. They also make it easy for a ResNet block to learn an identity function.
- There are two main type of blocks: The identity block and the convolutional block.
- Very deep Residual Networks are built by stacking these blocks together.
References
This notebook presents the ResNet algorithm due to He et al. (2015). The implementation here also took significant inspiration and follows the structure given in the github repository of Francois Chollet:
- Kaiming He, Xiangyu Zhang, Shaoqing Ren, Jian Sun - Deep Residual Learning for Image Recognition (2015)
- Francois Chollet's github repository: https://github.com/fchollet/deep-learning-models/blob/master/resnet50.py