均值滤波 中值滤波 高斯平滑滤波
均值滤波是典型的线性滤波算法,它是指在图像上对目标像素给一个模板,该模板包括了其周围的临近像素(以目标象素为中心的周围8个像素,构成一个滤波模板,即去掉目标像素本身),再用模板中的全体像素的平均值来代替原来像素值。均值滤波本身存在着固有的缺陷,即它不能很好地保护图像细节,在图像去噪的同时也破坏了图像的细节部分,从而使图像变得模糊,不能很好地去除噪声点。
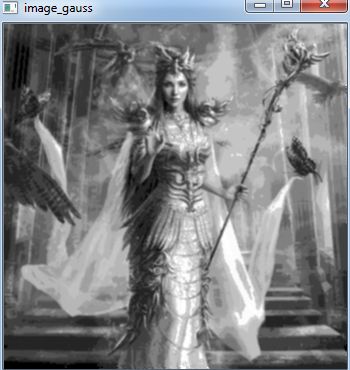
图像平滑用于去除图像中的噪声。高斯平滑,就是将每个像素的灰度值用其领域的加权平均值代替。该算法简单,能够有效去除高斯噪声。
高斯平滑模板:

高斯:
均值:

中值:

//高斯平滑 中值滤波 均值滤波
#include
#include
// 高斯平滑
// 1. pImageData 图像数据
// 2. nWidth 图像宽度
// 3. nHeight 图像高度
// 4. nWidthStep 图像行大小
bool SmoothGauss(unsigned char *pImageData, int nWidth, int nHeight, int nWidthStep)
{
int i = 0;
int j = 0;
int nValue = 0;
unsigned char *pLine[3] = { NULL, NULL, NULL };
int nTemplate[9] =
{
1, 2, 1,
2, 4, 2,
1, 2, 1
};
for (j = 1; j < nHeight - 1; j++)
{
pLine[0] = pImageData + nWidthStep * (j - 1); //对应3行3列高斯模板矩阵中的 3行列。
pLine[1] = pImageData + nWidthStep * j;
pLine[2] = pImageData + nWidthStep * (j + 1);
for (i = 1; i < nWidth - 1; i++)
{
nValue =
(pLine[0][i - 1] * nTemplate[0] + //对应3行3列矩阵中的各个点。
pLine[0][i] * nTemplate[1] +
pLine[0][i + 1] * nTemplate[2] +
pLine[1][i - 1] * nTemplate[3] +
pLine[1][i] * nTemplate[4] +
pLine[1][i + 1] * nTemplate[5] +
pLine[2][i - 1] * nTemplate[6] +
pLine[2][i] * nTemplate[7] +
pLine[2][i + 1] * nTemplate[8]) / 16;
pLine[0][i - 1] = (unsigned char)nValue;
}
}
return true;
}
int main()
{
IplImage * image, *image2, *image3,*image4;
image = cvLoadImage("C:\\Users\\lyb\\Documents\\Visual Studio 2013\\Projects\\ConsoleApplication 14_11_4\\11.bmp", 0);//以灰度图像的形式读入图片
cvNamedWindow("image_first-hand", CV_WINDOW_AUTOSIZE);
cvNamedWindow("image_jun_zhi", CV_WINDOW_AUTOSIZE);
cvNamedWindow("image_zhong_zhi", CV_WINDOW_AUTOSIZE);
cvNamedWindow("image_gauss", CV_WINDOW_AUTOSIZE);
//cvSaveImage("E:\\image\\moon.jpg",image,0);
cvShowImage("image_first-hand", image);
//cvWaitKey(0);
unsigned char * ptr, *dst;
int i, j, m, n, sum, temp, r, s;
image2 = cvCreateImage(cvGetSize(image), image->depth, 1);
image3 = cvCreateImage(cvGetSize(image), image->depth, 1);
image4 = cvLoadImage("C:\\Users\\lyb\\Documents\\Visual Studio 2013\\Projects\\ConsoleApplication 14_11_4\\11.bmp", 0);//以灰度图像的形式读入图片
//image4 = cvCreateImage(cvGetSize(image), image->depth, 1);
//模板1 均值
int tem[9] = { 1, 1, 1, 1, 1, 1, 1, 1, 1 };
//也可以使用改进的高斯模板,但是效果相近
int tem2[9] = { 0 };//获取中值时用于排序
//高斯滤波
unsigned char *pImageData1 = (unsigned char *)image4->imageData;
int nWidth1 = image4->width;
int nHeight1 = image4->height;
int nWidthStep1 = image4->widthStep;
if (SmoothGauss( pImageData1,nWidth1,nHeight1,nWidthStep1)==true)
printf("%15s", "return"); //运行结果:return;
//均值滤波3*3模板的均值
for (i = 0; i < image->height; i++){
for (j = 0; j< image->width; j++){
//边界处理
if (i == 0 || i == image->height || j == 0 || j == image->width){
ptr = (unsigned char *)image->imageData + i*image->widthStep + j;
dst = (unsigned char *)image2->imageData + i*image2->widthStep + j;
*dst = *ptr; //边界值赋予源图像的值
}
else {
sum = 0;
for (m = -1; m <= 1; m++){
for (n = -1; n <= 1; n++){
ptr = (unsigned char *)image->imageData + (i + m)*image->widthStep + j + n;
sum += (*ptr) * tem[3 * (m + 1) + n + 1];
}
}
dst = (unsigned char *)image2->imageData + i *image2->widthStep + j;
*dst = (unsigned char)((sum + 4) / 9);//赋新值,四舍五入
}
}
}
//中值滤波 在去除噪声的同时,图像的模糊程度比较小,比均值滤波更加适合
//冲击噪声或者称为椒盐噪声
for (i = 0; i < image->height; i++){
for (j = 0; j< image->width; j++){
//边界处理
if (i == 0 || i == image->height || j == 0 || j == image->width){
ptr = (unsigned char *)image->imageData + i*image->widthStep + j;
dst = (unsigned char *)image3->imageData + i*image3->widthStep + j;
*dst = *ptr; //边界值赋予源图像的值
}
else {
temp = 0;
//将3*3模板覆盖的值拷贝进数组,一边查找中值
for (m = -1; m <= 1; m++){
for (n = -1; n <= 1; n++){
ptr = (unsigned char *)image->imageData + (i + m)*image->widthStep + j + n;
tem2[3 * (m + 1) + n + 1] = *ptr;
//printf("%d",*ptr);
}
}
//对数组进行冒泡排序
for (r = 0; r <8; r++){
for (s = 0; s< r - 1; s++){
if (tem2[s] > tem2[s + 1]){
temp = tem2[s];
tem2[s] = tem2[s + 1];
tem2[s + 1] = temp;
}
}
}
//printf("%d",tem2[4]);
//对新图赋予新值
dst = (unsigned char *)image3->imageData + i *image3->widthStep + j;
*dst = (unsigned char)(tem2[4]);//赋新值
}
}
}
cvShowImage("image_jun_zhi", image2);
cvShowImage("image_zhong_zhi", image3);
cvShowImage("image_gauss", image4);
cvWaitKey(0);
//cvSaveImage("E:\\image\\Dart2.bmp", image2, 0);
//cvSaveImage("E:\\image\\Dart3.bmp", image3, 0);
return 0;
}
高斯:
均值:
中值: