SLAM之路-OpenCV3张正友相机标定
版权声明:Davidwang原创文章,严禁用于任何商业途径,授权后方可转载。
由于相机使用的镜头制造工艺及安装工艺存在精度误差,造成投影后的像素发生畸变,这会给以图像输入为主的视觉分析带来干扰,严重时导致算法完全失效。通常的解决方案是通过相机标定获取到相机的内参数据,然后用这些参数校正输入的图像。相机内参是对相机制造、安装环节出现偏差的参数化表达,有的相机会在出厂时提供内参数据,有的则不提供,对不提供内参数数据的相机,我们需要自己通过算法拿到这些数据,这就是本节所要讲述的相机标定内容。
标定相机通常采用张正友棋盘格标定法,通过相机拍摄打印好的棋盘格图像,利用OpenCV3可以通过调用其内置算法拿到相机内参,理想情况下只需要3张棋盘格图像即可,一般为提高鲁棒性,会使用10余张图像,其流程如下图所示。

下面以上面的流程图为准介绍各步骤及其所涉及到的OpenCV3函数。
(一)提取角点
提取角点即是提取图像的特征,以便在各图片间匹配特征点,用到的函数为findChessboardCorners(),该函数原型为:
CV_EXPORTS_W bool findChessboardCorners( InputArray image, Size patternSize,
OutputArray corners,
int flags=CALIB_CB_ADAPTIVE_THRESH+CALIB_CB_NORMALIZE_IMAGE );
其各参数意义如下表所示:
| 参数 | 描述 |
|---|---|
| image | 输入的棋盘图Mat图像,必须是8位的灰度或者彩色图像 |
| patternSize | 每个棋盘图上内角点的行列数,行列数尽量不要相同,便于后续标定程序识别标定板的方向 |
| corners | 用于存储检测到的内角点图像坐标位置,一般用元素是Point2f的向量来表示:vector image_points_buf |
| flags | 用于定义棋盘图上内角点查找的处理方式,通常使用默认值即可 |
(二)提取亚像素点
为降低相机标定偏差,提高精度,通常还需要在初步提取的角点信息上进一步提取亚像素信息。提取亚像素信息有两种方法:cornerSubPix()、find4QuadCornerSubpix(),这两种方法都可以提取到图像亚像素信息,本节我们使用find4QuadCornerSubpix()方法,该方法原型如下:
CV_EXPORTS bool find4QuadCornerSubpix(InputArray img, InputOutputArray corners, Size region_size);
其各参数意义如下表所示:
| 参数 | 描述 |
|---|---|
| img | 输入的棋盘图Mat图像,必须是8位的灰度或者彩色图像 |
| corners | 初始的角点坐标向量,同时作为亚像素坐标位置的输出,浮点型数据,一般用元素是Pointf2f/Point2d的向量来表示:vector |
| region_size | 角点搜索窗口尺寸 |
(三)标定相机
经过上述处理,获取到棋盘标定图的内角点图像坐标之后,就可以使用calibrateCamera()函数进行标定,计算相机内参数据,calibrateCamera()函数原型:
CV_EXPORTS_W double calibrateCamera( InputArrayOfArrays objectPoints,
InputArrayOfArrays imagePoints,
Size imageSize,
CV_OUT InputOutputArray cameraMatrix,
CV_OUT InputOutputArray distCoeffs,
OutputArrayOfArrays rvecs, OutputArrayOfArrays tvecs,
int flags=0, TermCriteria criteria = TermCriteria(
TermCriteria::COUNT+TermCriteria::EPS, 30, DBL_EPSILON) );
其各参数意义如下表所示:
| 参数 | 描述 |
|---|---|
| objectPoints | 相机坐标系中的角点三维坐标。在使用时,输入一个三维坐标点的向量的向量,即vector |
| imagePoints | 为每一个内角点对应的图像坐标点。在使用时,输入一个二维坐标点的向量的向量,即vector |
| imageSize | 为图像的像素尺寸大小,在计算相机的内参和畸变矩阵时需要使用到该参数 |
| cameraMatrix | 相机的内参矩阵。输入一个Mat cameraMatrix即可,如Mat cameraMatrix=Mat(3,3,CV_32FC1,Scalar::all(0)) |
| distCoeffs | distCoeffs为畸变矩阵。摄像机的5个畸变系数:k1,k2,p1,p2,k3,使用如Mat distCoeffs=Mat(1,5,CV_32FC1,Scalar::all(0)) |
| rvecs | 相机外参旋转向量,应该输入一个Mat类型的vector,如vector |
| tvecs | 相机外参平移向量,应该输入一个Mat类型的vector,如vector |
| flags | 标定时所采用的算法。有如下几个参数:CV_CALIB_USE_INTRINSIC_GUESS:使用该参数时,在cameraMatrix矩阵中应该有fx,fy,u0,v0的估计值。否则的话,将初始化(u0,v0)图像的中心点,使用最小二乘估算出fx,fy;CV_CALIB_FIX_PRINCIPAL_POINT:在进行优化时会固定光轴点。当CV_CALIB_USE_INTRINSIC_GUESS参数被设置,光轴点将保持在中心或者某个输入的值;CV_CALIB_FIX_ASPECT_RATIO:固定fx/fy的比值,只将fy作为可变量,进行优化计算。当CV_CALIB_USE_INTRINSIC_GUESS没有被设置,fx和fy将会被忽略。只有fx/fy的比值在计算中会被用到;CV_CALIB_ZERO_TANGENT_DIST:设定切向畸变参数(p1,p2)为零;CV_CALIB_FIX_K1,…,CV_CALIB_FIX_K6:对应的径向畸变在优化中保持不变;CV_CALIB_RATIONAL_MODEL:计算k4,k5,k6三个畸变参数。如果没有设置,则只计算其它5个畸变参数。 |
| criteria | 迭代终止条件,通常使用默认值即可 |
可以看到,该函数中的参数有的是用作输入,有的是用作输出,如果没有错误,该函数会返回相机的内参数矩阵和外参数旋转向量和平移向量。
(四)验证
为验证每一个步骤中的流程是否正确,可以通过查看每一步骤执行的结果,如可以通过drawChessboardCorners()函数绘制被成功标定的角点,还可以通过重投影函数projectPoints(),该函数对空间的三维点进行重新投影计算,得到空间三维点在图像上新的投影点的坐标,计算投影坐标和亚像素角点坐标之间的偏差,评定标定结果,偏差越小越好。projectPoints()函数原型如下:
CV_EXPORTS_W void projectPoints( InputArray objectPoints,
InputArray rvec, InputArray tvec,
InputArray cameraMatrix, InputArray distCoeffs,
OutputArray imagePoints,
OutputArray jacobian=noArray(),
double aspectRatio=0 );
其各参数意义如下表所示:
| 参数 | 描述 |
|---|---|
| objectPoints | 从图像中提出计算的相机坐标系中的三维点坐标 |
| rvec | 旋转向量 |
| tvec | 平移向量 |
| cameraMatrix | 相机内参矩阵 |
| distCoeffs | 相机畸变参数 |
| jacobian | 雅可比矩阵 |
| aspectRatio | 相机传感器的感光单元有关的可选参数,如果设置为非0,则函数默认感光单元的dx/dy是固定的,会依此对雅可比矩阵进行调整 |
通过projectPoints()重投影方法可以得到理性的误差数据。
(五)矫正
通过上述方法得到相机内参数据和外参数据后,就可以对图像进行畸变的矫正,通常有两种矫正方法,下面分别予以说明。
方法一
方法一使用initUndistortRectifyMap()和remap()两个函数配合实现,initUndistortRectifyMap()函数用于计算畸变映射,remap()函数将映射结果应用到图像上,initUndistortRectifyMap()函数原型如下:
CV_EXPORTS_W void initUndistortRectifyMap( InputArray cameraMatrix, InputArray distCoeffs,
InputArray R, InputArray newCameraMatrix,
Size size, int m1type, OutputArray map1, OutputArray map2 );
其各参数意义如下表所示:
| 参数 | 描述 |
|---|---|
| cameraMatrix | 相机内参矩阵 |
| distCoeffs | 相机畸变因子 |
| R | 旋转矩阵 |
| newCameraMatrix | 校正后的3X3摄像机矩阵,默认跟cameraMatrix保持一致 |
| size | 图像尺寸 |
| m1type | 定义map1的数据类型,可以是CV_32FC1或者CV_16SC2 |
| map1 | 输出的X坐标重映射参数 |
| map2 | 输出的Y坐标重映射参数 |
remap()函数原型如下:
CV_EXPORTS_W void remap( InputArray src, OutputArray dst,
InputArray map1, InputArray map2,
int interpolation, int borderMode=BORDER_CONSTANT,
const Scalar& borderValue=Scalar());
其各参数意义如下表所示:
| 参数 | 描述 |
|---|---|
| src | 原始图像 |
| dst | 矫正后的输出图像 |
| map1 | X坐标重映射参数 |
| map2 | Y坐标重映射参数 |
| interpolation | 像素插值方式 |
| borderMode | 边界填充方式 |
| Scalar | 边界填充值,默认为黑色 |
方法二
使用undistort()函数实现,该方法更简洁,内部处理了重映射相关操作,但通常方法一比方法二效率更好一些,undistort()函数原型如下:
CV_EXPORTS_W void undistort( InputArray src, OutputArray dst,
InputArray cameraMatrix,
InputArray distCoeffs,
InputArray newCameraMatrix=noArray() );
其各参数意义如下表所示:
| 参数 | 描述 |
|---|---|
| src | 原始图像 |
| dst | 矫正后的输出图像 |
| cameraMatrix | 相机内参矩阵 |
| distCoeffs | 相机畸变因子 |
| newCameraMatrix | 校正后的3X3摄像机矩阵,默认跟cameraMatrix保持一致 |
(六)原代码
通过上述基础知识,我们就可以很轻松的写出相机标定程序,具体的代码如下,在有基础知识及详细的注释,相信代码很容易看明白。
/*
* Calibration camera
* author:Davidwang
* date :2020.08.21
*/
#include "opencv2/core/core.hpp"
#include "opencv2/imgproc/imgproc.hpp"
#include "opencv2/calib3d/calib3d.hpp"
#include "opencv2/highgui/highgui.hpp"
#include CMakeLists如下
# 声明要求的 cmake 最低版本
cmake_minimum_required(VERSION 2.8)
# 声明一个 cmake 工程
project(Calibration)
# 设置编译模式
set(CMAKE_BUILD_TYPE "Debug")
find_package(OpenCV REQUIRED)
# 添加可执行程序
add_executable(calibration Calibration.cpp)
# 将库文件链接到可执行程序上
target_link_libraries(calibration ${OpenCV_LIBS})
代码在Ubuntu18.04,OpenCV3.4.11环境下编译通过。
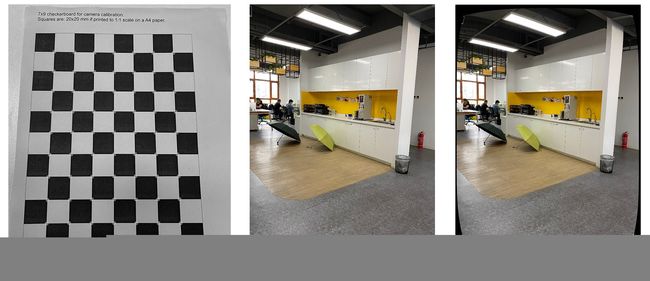
(七)效果
经过我们测试,上述代码能比较好的实现相机内参与外内的标定,相关效果图如下:
(八)相关资源
相关资源包括:标定图纸、测试图像、矫正验证图像。标定图纸可直接A4打印使用,不用另行处理 ,测试图像与验证图像本人亲自拍摄,验证图像可供矫正验证。请从[这里]下载。
(九)参考文献
1、张正友相机标定Opencv实现以及标定流程&&标定结果评价&&图像矫正流程解析(附标定程序和棋盘图)
2、Camera Calibration and 3D Reconstruction
3、calibrateCamera() 原理