C++ 算法学习四(直线、抛物线拟合)
好久没写博客了,忘了怎么开场,哈哈,小编在从事车道线检测,以及机器学习算法线性回归时都用到了线性拟合与多项式拟合,其实可以直接通过opencv的API接口也可实现,具体可见
polynomial_curve_fit(points,1, A);
但是嵌入式平台木有opencv, 于是就详细研究了一下其中数学原理,用C++ 在嵌入式平台直接实现了一下;
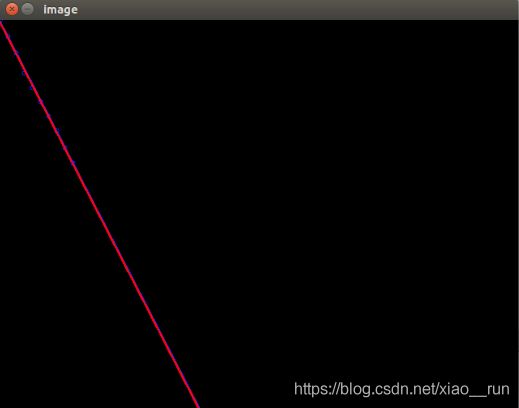
先上结果图吧
直线拟合
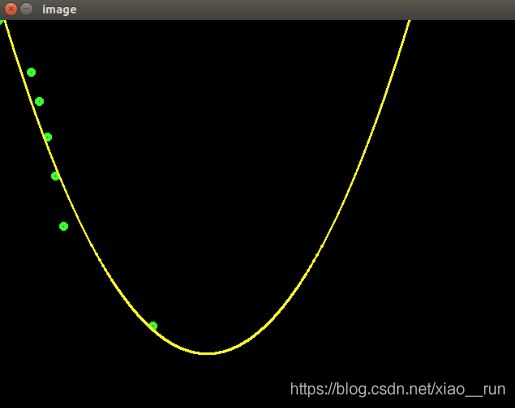
曲线抛物线拟合
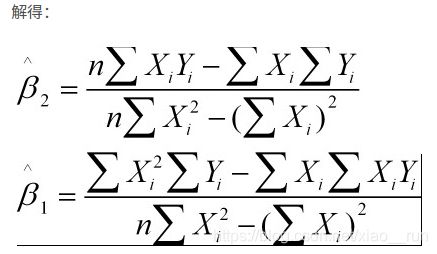
下面我详细记录下拟合过程:
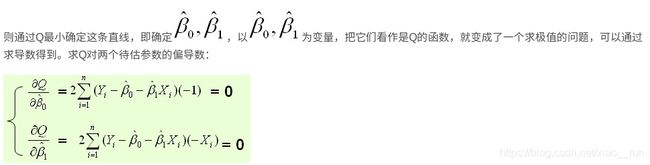
(1)
对于一元线性回归模型, 假设从总体中获取了n组观察值(X1,Y1),(X2,Y2), …,(Xn,Yn)。对于平面中的这n个点,可以使用无数条曲线来拟合。要求样本回归函数尽可能好地拟合这组值。综合起来看,这条直线处于样本数据的中心位置最合理。 选择最佳拟合曲线的标准可以确定为:使总的拟合误差(即总残差)达到最小。有以下三个标准可以选择:
(1)用“残差和最小”确定直线位置是一个途径。但很快发现计算“残差和”存在相互抵消的问题。
(2)用“残差绝对值和最小”确定直线位置也是一个途径。但绝对值的计算比较麻烦。
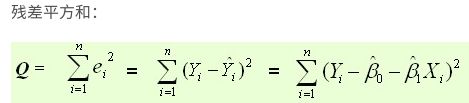
(3)最小二乘法的原则是以“残差平方和最小”确定直线位置。用最小二乘法除了计算比较方便外,
得到的估计量还具有优良特性。这种方法对异常值非常敏感。
最常用的是普通最小二乘法( Ordinary Least Square,OLS):所选择的回归模型应该使所有
观察值的残差平方和达到最小。(Q为残差平方和)
直线方程如下

代码实现(直线与抛物线写在一起,注释#define DEBUG为直线)
#include
#include
#include
#include
#include
#include
//#define DEBUG //直线拟合,关闭则抛物线拟合
using namespace cv;
using namespace std;
//最小二乘法///
vectorleast_square_line(vector,int n);
//
//最小二乘法直线拟合/
vectorleast_square_line(vectorpoints,int n)
{
vectorresult;
a = (n*C - B*D) / (n*A - B*B)
/// b = (A*D - B*C) / (n*A - B*B)
float A = 0; //x的平方求和
float B = 0; //x求和
float C = 0; //xy求和
float D = 0; //y求和
float E = 0; //样本个数
//cout<<"A"< Vnum, int n);
double MutilSum(vector Vx, vector Vy, int n);
double RelatePow(vector Vx, int n, int ex);
double RelateMutiXY(vector Vx, vector Vy, int n, int ex);
void EMatrix(vector Vx, vector Vy, int n, int ex, double coefficient[]);
void CalEquation(int exp, double coefficient[]);
double F(double c[],int l,int m);
double Em[6][4];
最小二乘法曲线你拟合
//累加
double sum(vector Vnum, int n)
{
double dsum = 0;
for (int i = 0; i < n; i++) {
dsum += Vnum[i];
}
return dsum;
}
//乘积和
double MutilSum(vector Vx, vector Vy, int n)
{
double dMultiSum=0;
for (int i=0; i Vx, int n, int ex)
{
double ReSum=0;
for (int i=0; i Vx, vector Vy, int n, int ex)
{
double dReMultiSum=0;
for (int i=0; i Vx, vector Vy, int n, int ex, double coefficient[])
{
for (int i=1; i<=ex; i++)
{
for (int j=1; j<=ex; j++)
{
Em[i][j]=RelatePow(Vx,n,i+j-2);
}
Em[i][ex+1]=RelateMutiXY(Vx,Vy,n,i-1);
}
Em[1][1]=n; CalEquation(ex,coefficient);
}
//求解方程
void CalEquation(int exp, double coefficient[])
{
for(int k=1;k=1;l--)
//回代求解
coefficient[l]=(Em[l][exp+1]-F(coefficient,l+1,exp))/Em[l][l];
}
//供CalEquation函数调用
double F(double c[],int l,int m)
{
double sum=0;
for(int i=l;i<=m;i++)
sum+=Em[l-1][i]*c[i];
return sum;
}
///最小二乘法曲线你拟合
///最小二乘法曲线你拟合
///最小二乘法曲线你拟合
int main()
{
cv::Mat image = cv::Mat::zeros(480, 640, CV_8UC3);
vector points;
vectorslope;
cv::Vec4f line_para;
float num;
#ifdef DEBUG
float x[10]={0,10,20,30,40,50,60,70,80,90};
float z[10]={0,20.2,40.1,65,83,100.1,118,136,157,176};
for(int l=0;l<=9;l++)
{
circle(image,Point2f(x[l],z[l]),3,Scalar(255,0,0),1,8);
Point2f pt(x[l],z[l]);
points.push_back(pt);
}
slope=least_square_line(points,10);
fitLine(points,line_para,cv::DIST_L2, 0, 1e-2, 1e-2);
///
//opencv fitline/
float k=line_para[1]/line_para[0];
cv::Point point1, point2,point0;
point0.x = line_para[2];
point0.y = line_para[3];
//计算直线的端点(y = k(x - x0) + y0)
cv::Point point3, point4;
point3.x = 0;
point3.y = k * (0 - point0.x) + point0.y;
point4.x = 640;
point4.y = k * (640 - point0.x) + point0.y;
cv::line(image, point3, point4, cv::Scalar(255, 0, 0), 2, 8, 0);
//opencv fitline/
//最小二乘法/
point1.x = 0;
point1.y = slope[1];
point2.y = 480;
point2.x = (480 - slope[1]) /slope[0];
cout<vx,vy;
for (int k = 0; k <7 ; ++k)
{
circle(image,Point2f(y[k],h[k]),3,Scalar(0,255,0),3,8);
vx.push_back(y[k]);
vy.push_back(h[k]);
}
double time1 = static_cast(getTickCount()); //记录起始时间
EMatrix(vx,vy,7,3,coffocoent);
time1=((double)getTickCount()-time1)/getTickFrequency(); //计算程序运行时间
cout<<"此方法运行时间为:"<points_fitted;
for (int p = 0; p <5; ++p) {
cout<A(3,1);
A.at(0,0)=coffocoent[1];
A.at(1,0)=coffocoent[2];
A.at(2,0)=coffocoent[3];
for (int x = 0; x < 640; x++)
{
double y = A.at(0, 0) + A.at(1, 0) * x + A.at(2, 0) * std::pow(x, 2) ;
points_fitted.push_back(cv::Point(x,y));
}
cv::polylines(image, points_fitted, false, cv::Scalar(0, 255, 255), 2, 8, 0);
#endif
cv::imshow("image", image);
cv::waitKey(0);
return 0;
}