摄像机标定用于机械臂抓举等(利用标定将图像上的点映射为三维坐标)
在实验室或者是工程上,我们常常需要将拍摄到的图像的二维图像坐标来计算三维坐标。

如上图所示,我们有上图这样的一副图片。我们需要将物体和机械臂的三维位置算出来,使得机械臂能够精确的抓住物体。
我们采用张正友标定的方法标定出内外参数,利用其内参与外参数算出其对应的三维坐标。具体公式略!可以参考张PAMI的论文。
/*/
//author:YeahPingYE
//function:
//time:2014/11/25
//
//
//
//
//
//*/
#include
#include
#include
#include
using namespace std;
int main()
{
/*initialation
//input:the number of images......num_image
// prj_board_w,prj_board_h
// cam_board_w,cam_board_h
*/
CvMat*cam_object_points2;
CvMat*cam_image_points2;
int cam_board_n;
int successes = 0;
int img_num, cam_board_w, cam_board_h;
cout << "输入的图像的组数\n";
cin >> img_num;
cout << "输入**真实**棋盘格的##横轴##方向的角点个数\n";
cin >> cam_board_w;
cout << "输入**真实**棋盘格的##纵轴##方向的角点个数\n";
cin >> cam_board_h;
double cam_Dx = 30;//chessboard's width
double cam_Dy = 30;
cout << "输入**真实**棋盘格的##横轴##大小dx\n";
cin >> cam_Dx;
cout << "输入**真实**棋盘格的##纵轴##大小dy\n";
cin >> cam_Dy;
/*int img_num =4;
int cam_board_w = 10;
int cam_board_h = 8;*/
cam_board_n = cam_board_w*cam_board_h;
double x_pixel, y_pixel;
cout << "输入要求的位置的像素坐标\n横轴方向的像素坐标#u#\n";
cin >> x_pixel;
cout << "纵轴方向的像素坐标#v#\n";
cin >> y_pixel;
//x_pixel =0;
//y_pixel = 0;
//x_pixel = 6.01938965e+002;
//y_pixel = 5.65429077e+002;
//x_pixel = 7.04663452e+002;
//y_pixel = 5.54746582e+002;
//x_pixel = 8.88867798e+002;
//y_pixel = 9.58109802e+002;
/*
//init
//
//
*/
//camera init
CvSize cam_board_sz = cvSize(cam_board_w, cam_board_h);
CvMat*cam_image_points = cvCreateMat(cam_board_n*(img_num), 2, CV_32FC1);
CvMat*cam_object_points = cvCreateMat(cam_board_n*(img_num), 3, CV_32FC1);
CvMat*cam_point_counts = cvCreateMat((img_num), 1, CV_32SC1);
CvPoint2D32f*cam_corners = new CvPoint2D32f[cam_board_n];
int cam_corner_count;
int cam_step;
CvMat*cam_intrinsic_matrix = cvCreateMat(3, 3, CV_32FC1);
CvMat*cam_distortion_coeffs = cvCreateMat(4, 1, CV_32FC1);
CvSize cam_image_sz;
//window intit
cvNamedWindow("window", 0);
//get image size
IplImage *cam_image_temp = cvLoadImage("..\\cam\\cam1.bmp", 0);
cam_image_sz = cvGetSize(cam_image_temp);
/*
//extract cornner
// camera image
*/
for (int ii = 1; ii < img_num + 1; ii++)
{
char cambuf[20] = { 0 };
sprintf(cambuf, "..\\cam\\cam%d.bmp", ii);
IplImage *cam_image = cvLoadImage(cambuf, 0);
//extract cam cornner
int cam_found = cvFindChessboardCorners(cam_image, cam_board_sz, cam_corners, &cam_corner_count,
CV_CALIB_CB_ADAPTIVE_THRESH | CV_CALIB_CB_FILTER_QUADS);
cvFindCornerSubPix(cam_image, cam_corners, cam_corner_count,
cvSize(11, 11), cvSize(-1, -1), cvTermCriteria(CV_TERMCRIT_EPS + CV_TERMCRIT_ITER, 30, 0.1));
cvDrawChessboardCorners(cam_image, cam_board_sz, cam_corners, cam_corner_count, cam_found);
//when camare success store the result
if ((cam_corner_count == cam_board_n)) {
//store cam result
cam_step = successes*cam_board_n;
for (int i = cam_step, j = 0; j < cam_board_n; ++i, ++j) {
CV_MAT_ELEM(*cam_image_points, float, i, 0) = cam_corners[j].x;
CV_MAT_ELEM(*cam_image_points, float, i, 1) = cam_corners[j].y;
CV_MAT_ELEM(*cam_object_points, float, i, 0) = (j/cam_board_w)*cam_Dx;
CV_MAT_ELEM(*cam_object_points, float, i, 1) = (j %cam_board_w)*cam_Dy;
CV_MAT_ELEM(*cam_object_points, float, i, 2) = 0.0f;
}
CV_MAT_ELEM(*cam_point_counts, int, successes, 0) = cam_board_n;
successes++;
cout << "success number" << successes << endl;
cvShowImage("window", cam_image);
cvWaitKey(500);
}
}
/*
//restore the success point
*/
//cam
cam_image_points2 = cvCreateMat(cam_board_n*(successes), 2, CV_32FC1);
cam_object_points2 = cvCreateMat(cam_board_n*(successes), 3, CV_32FC1);
CvMat*cam_point_counts2 = cvCreateMat((successes), 1, CV_32SC1);
for (int i = 0; i < successes*cam_board_n; ++i){
CV_MAT_ELEM(*cam_image_points2, float, i, 0) = CV_MAT_ELEM(*cam_image_points, float, i, 0);
CV_MAT_ELEM(*cam_image_points2, float, i, 1) = CV_MAT_ELEM(*cam_image_points, float, i, 1);
CV_MAT_ELEM(*cam_object_points2, float, i, 0) = CV_MAT_ELEM(*cam_object_points, float, i, 0);
CV_MAT_ELEM(*cam_object_points2, float, i, 1) = CV_MAT_ELEM(*cam_object_points, float, i, 1);
CV_MAT_ELEM(*cam_object_points2, float, i, 2) = CV_MAT_ELEM(*cam_object_points, float, i, 2);
}
for (int i = 0; i < successes; ++i){
CV_MAT_ELEM(*cam_point_counts2, int, i, 0) = CV_MAT_ELEM(*cam_point_counts, int, i, 0);
}
cvSave("..\\output\\XML\\cam_corners.xml", cam_image_points2);
cvReleaseMat(&cam_object_points);
cvReleaseMat(&cam_image_points);
cvReleaseMat(&cam_point_counts);
/*
//calibration for camera
//
*/
//calib for cam
CV_MAT_ELEM(*cam_intrinsic_matrix, float, 0, 0) = 1.0f;
CV_MAT_ELEM(*cam_intrinsic_matrix, float, 1, 1) = 1.0f;
CvMat* cam_rotation_all = cvCreateMat( successes, 3, CV_32FC1);
CvMat* cam_translation_vector_all = cvCreateMat( successes,3, CV_32FC1);
cvCalibrateCamera2(
cam_object_points2,
cam_image_points2,
cam_point_counts2,
cam_image_sz,
cam_intrinsic_matrix,
cam_distortion_coeffs,
cam_rotation_all,
cam_translation_vector_all,
0//CV_CALIB_FIX_ASPECT_RATIO
);
cvSave("..\\output\\XML\\cam_intrinsic_matrix.xml", cam_intrinsic_matrix);
cvSave("..\\output\\XML\\cam_distortion_coeffs.xml", cam_distortion_coeffs);
cvSave("..\\output\\XML\\cam_rotation_all.xml", cam_rotation_all);
cvSave("..\\output\\XML\\cam_translation_vector_all.xml", cam_translation_vector_all);
CvMat* cam_dist_image_points = cvCreateMat(cam_board_n, 1, CV_32FC2);
CvMat* cam_undist_image_points = cvCreateMat(cam_board_n, 1, CV_32FC2);
for (int j = 0; j < cam_board_n; ++j)
{
cvSet1D(cam_dist_image_points, j,
cvScalar(CV_MAT_ELEM(*cam_image_points2, float, j, 0),
CV_MAT_ELEM(*cam_image_points2, float, j, 1)));
//cout << CV_MAT_ELEM(*cam_dist_image_points, float, j, 0) << "\t" << CV_MAT_ELEM(*cam_dist_image_points, float, j, 1) << endl;
}
cvUndistortPoints(cam_dist_image_points, cam_undist_image_points,
cam_intrinsic_matrix, cam_distortion_coeffs, NULL, NULL);
cvReleaseMat(&cam_dist_image_points);
CvMat* homography = cvCreateMat(3, 3, CV_32FC1);
CvMat* cam_src = cvCreateMat(cam_board_n, 3, CV_32FC1);
CvMat* cam_dst = cvCreateMat(cam_board_n, 3, CV_32FC1);
for (int j = 0; j 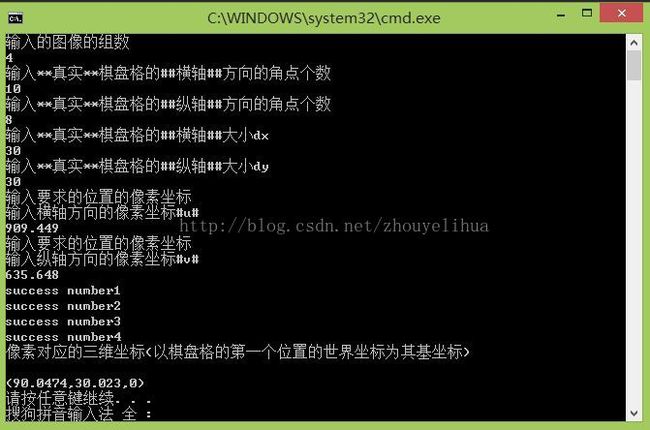
上述中像素(969.449,635.648)对应的真实第一个棋盘格的坐标是(90,60,0)上图得到的结果误差比较小。
具体程序的操作步骤及相关文件见网址(vs2013配置了opencv可以直接运行):
http://download.csdn.net/download/zhouyelihua/8236557
click here
csdn的下载这个版块实在太差了:要下载的上百度云盘http://pan.baidu.com/s/1hefQe
点击打开链接