ROS创建使用msg
在上一章内容中,讲述了ROS节点的发布和订阅。两个节点发布和订阅的消息类型是std_msgs提供的标准型。这一节中,将会讲述自定义消息的以及自定义消息的发布与订阅。
1. 创建消息(msg)
首先在ROS_Test1中创建msg文件夹:
cd ~/catkin_ws/src/ROS_Test1
mkdir msg
cd msg
vim ROS_Test1_msg.msg
添加内容如下所示:

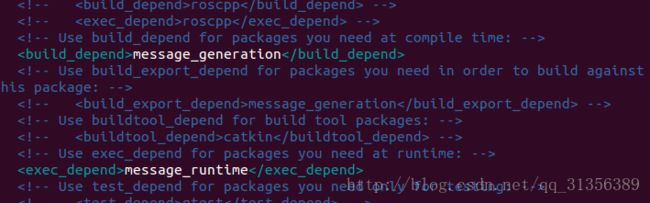
编辑~/catkin_ws/src/ROS_Test1路径下的package.xml文件。
将
和改成如下所示:
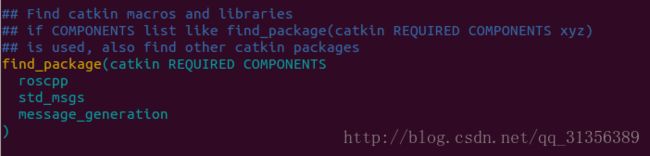
编辑~/catkin_ws/src/ROS_Test1路径下的CMakeLists.txt文件。
找到图示模块并加入依赖包message_generation
找到图示模块取消注释并修改为:


修改之后在~/catkin_ws/路径下执行如下命令行:
rosmsg show ROS_Test1_msg
若终端显示结果与ROS_Test1_msg.msg文件中的内容一致,则说明消息创建成功。
2. 使用消息(msg)
roscd ROS_Test1/srcvim node_c1.cpp 其中代码段如下:
#include "ros/ros.h"
#include "ROS_Test1/ROS_Test1_msg.h"
#include
int main(int argc, char **argv)
{
ros::init(argc, argv, "node_c1");
ros::NodeHandle n;
ros::Publisher pub = n.advertise("self_message", 1000);
ros::Rate loop_rate(10);
while(ros::ok())
{
ROS_Test1::ROS_Test1_msg msg;
msg.A = 1;
msg.B = 2;
msg.C = 3;
pub.publish(msg);
ROS_INFO("node_c1 is publishing msg.A msg.B msg.C");
ros::spinOnce();
loop_rate.sleep();
}
return 0;
} #include "ros/ros.h"
#include "ROS_Test1/ROS_Test1_msg.h"
void chatterCallback(const ROS_Test1::ROS_Test1_msg::ConstPtr& msg)
{
ROS_INFO("node_c2 is receiving msg.A = %d msg.B = %d msg.C = %d", msg->A, msg->B, msg->C);
}
int main(int argc, char **argv)
{
ros::init(argc, argv, "node_c2");
ros::NodeHandle n;
ros::Subscriber sub = n.subscribe("self_message", 1000, chatterCallback);
ros::spin();
return 0;
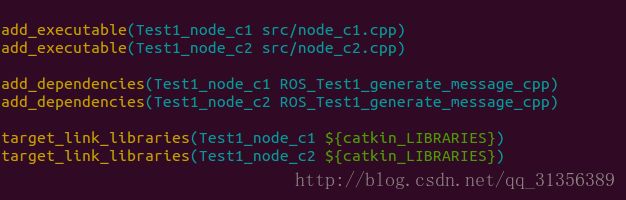
}3. 编译节点
roscd ROS_Test1编辑~/catkin_ws/src/ROS_Test1路径下的CMakeLists.txt文件,尾部增加如下内容:
cd ~/catkin_ws
catkin_make
roscore
新打开两个终端在~/catkin_ws/路径下分别运行(先执行source devel/setup.bash)
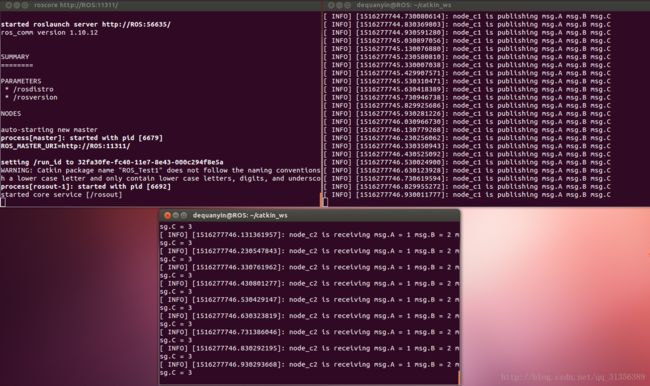
rosrun ROS_Test1 Test1_node_c1
rosrun ROS_Test1 Test1_node_c2
运行结果如下: