Opencv学习笔记--使用convexityDefects计算轮廓凸缺陷
首先介绍今天主角:void convexityDefects(InputArray contour, InputArray convexhull, OutputArray convexityDefects)
使用时注意,最后一个参数 convexityDefects 是存储 Vec4i 的向量(vector
All is so easy!下面就是简单的代码示例(首先计算两个轮廓的凸包,然后计算两个轮廓的凸缺陷):
// 计算凸缺陷 convexityDefect
//
#include "stdafx.h"
#include
#include
using namespace std;
using namespace cv;
int _tmain(int argc, _TCHAR* argv[])
{
Mat *img_01 = new Mat(400, 400, CV_8UC3);
Mat *img_02 = new Mat(400, 400, CV_8UC3);
*img_01 = Scalar::all(0);
*img_02 = Scalar::all(0);
// 轮廓点组成的数组
vector points_01,points_02;
// 给轮廓组赋值
points_01.push_back(Point(10, 10));points_01.push_back(Point(10,390));
points_01.push_back(Point(390, 390));points_01.push_back(Point(150, 250));
points_02.push_back(Point(10, 10));points_02.push_back(Point(10,390));
points_02.push_back(Point(390, 390));points_02.push_back(Point(250, 150));
vector hull_01,hull_02;
// 计算凸包
convexHull(points_01, hull_01, true);
convexHull(points_02, hull_02, true);
// 绘制轮廓
for(int i=0;i < 4;++i)
{
circle(*img_01, points_01[i], 3, Scalar(0,255,255), CV_FILLED, CV_AA);
circle(*img_02, points_02[i], 3, Scalar(0,255,255), CV_FILLED, CV_AA);
}
// 绘制凸包轮廓
CvPoint poi_01 = points_01[hull_01[hull_01.size()-1]];
for(int i=0;i < hull_01.size();++i)
{
line(*img_01, poi_01, points_01[i], Scalar(255,255,0), 1, CV_AA);
poi_01 = points_01[i];
}
CvPoint poi_02 = points_02[hull_02[hull_02.size()-1]];
for(int i=0;i < hull_02.size();++i)
{
line(*img_02, poi_02, points_02[i], Scalar(255,255,0), 1, CV_AA);
poi_02 = points_02[i];
}
vector defects;
// 如果有凸缺陷就把它画出来
if( isContourConvex(points_01) )
{
cout<<"img_01的轮廓是凸包"<,<"<,<"<到轮廓的距离为:"< defects;
convexityDefects(
points_01,
Mat(hull_01),
defects
);
// 绘制出缺陷的轮廓
for(int i=0;i < defects.size();++i)
{
circle(*img_02, points_01[defects[i][0]], 6, Scalar(255,0,0), 2, CV_AA);
circle(*img_02, points_01[defects[i][1]], 6, Scalar(255,0,0), 2, CV_AA);
circle(*img_02, points_01[defects[i][2]], 6, Scalar(255,0,0), 2, CV_AA);
line(*img_02, points_01[defects[i][0]], points_01[defects[i][1]], Scalar(255,0,0), 1, CV_AA);
line(*img_02, points_01[defects[i][1]], points_01[defects[i][2]], Scalar(255,0,0), 1, CV_AA);
line(*img_02, points_01[defects[i][2]], points_01[defects[i][0]], Scalar(255,0,0), 1, CV_AA);
// 因为 img_02 没有缺陷所以就懒的写那些输出代码了
}
defects.clear();
}
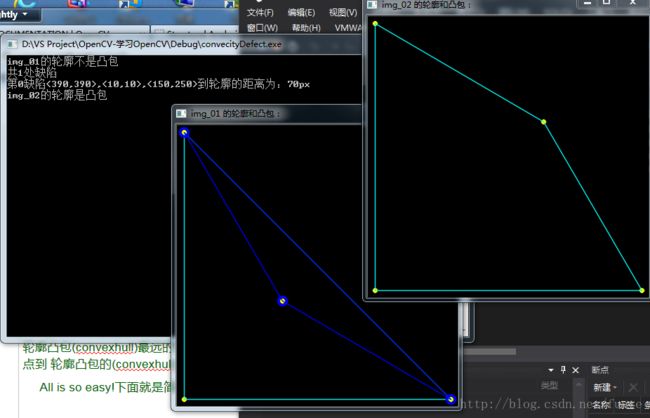
imshow("img_01 的轮廓和凸包:", *img_01);
imshow("img_02 的轮廓和凸包:", *img_02);
cvWaitKey();
return 0;
}