二、opencv学习笔记——MAC下安装配置opencv+contrib
在MAC下安装配置opencv+contrib,我也是踩了很多坑。不像Windows可以直接拿别人编译好的库在VS中配置就行,MAC由于最后要在终端配置,会自动查找编译路径,所以必须要自己一步一步来。
下面先说一下我遇到的几个问题:
一、configure过程中会出现文件无法下载问题,由于是外网下载,速度可能很慢会导致无法下载,主要是ippicv文件,有教程说可以先从网上下载对应文件放入根目录configure会通过,我没成功。我是成功下载,虽然速度有点慢。以下是对应文件下载地址:
ippicv等文件下载
二、配置一遍后,要添加对应的contrib库,一定要下载和opencv版本一致的,可在分支里选择,我下的是4.1版本的
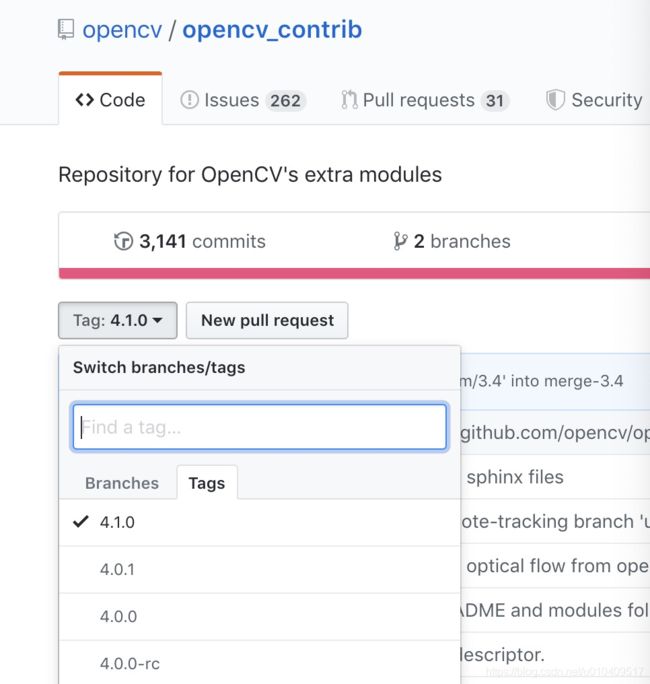
contrib库
三、第一遍configure后要选择opencv_enable_nonfree和build_opencv_world
![]()
![]()
下面开始进入正式教程:
1、安装homebrew,后续终端配置要用到
ruby -e "$(curl -fsSL https://raw.githubusercontent.com/Homebrew/install/master/install)”
2、下载cmake
cmake下载地址
3、下载opencv和对应opencv contrib
我用的是4.1.0,选择source版本
opencv下载
opencv contrib
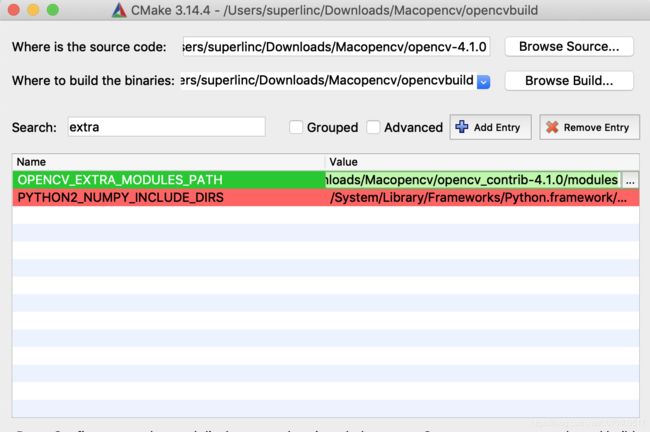
4、cmake配置
source code路径就是刚刚下载的opencv,build目录为自己新建的要编译的目录

点击configure,下载ippicv文件时会比较久,等待configuration done,选择opencv_enable_nonfree和build_opencv_world
额外路径选择下载的openc_contrib/modules
点击configure,configuratedone后红色消失,再点击generate,直到generate done。
cmake配置完毕
5、打开终端,cd到刚才你生成的编译路径中
 输入make,开始编译,时间会非常长
输入make,开始编译,时间会非常长
最后输入sudo make install,输入密码后继续等待,这样opencv+contrib就配置完毕了。
lib在/usr/local/lib(command+shift+g输入/usr/local/lib前往)

由于之前选了build_opencv_world,所以所有库都集成到了这里,后续调用直接调用这个就行了

header在/usr/local/include/opencv4中
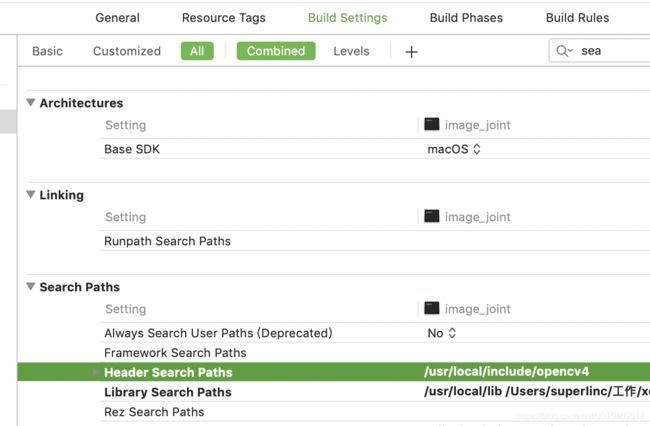
6、Xcode配置opencv
build settings输入search,在头路径选择/usr/local/include/opencv4,库路径选择/usr/local/lib
build phases——>link binary with libraries,添加库文件

7、测试,实现全景图拼接
把两张图片路径修改一下就行
#include "opencv2/highgui/highgui.hpp"
#include "opencv2/imgproc.hpp"
#include "opencv2/imgcodecs.hpp"
#include "opencv2/features2d.hpp"
#include "opencv2/xfeatures2d.hpp"
#include
#include
using namespace cv;
using namespace std;
using namespace cv::xfeatures2d;
void OptimizeSeam(Mat& img1, Mat& trans, Mat& dst);
typedef struct
{
Point2f left_top;
Point2f left_bottom;
Point2f right_top;
Point2f right_bottom;
}four_corners_t;
four_corners_t corners;
void CalcCorners(const Mat& H, const Mat& src)
{
double v2[] = { 0, 0, 1 };//左上角
double v1[3];//变换后的坐标值
Mat V2 = Mat(3, 1, CV_64FC1, v2); //列向量
Mat V1 = Mat(3, 1, CV_64FC1, v1); //列向量
V1 = H * V2;
//左上角(0,0,1)
cout << "V2: " << V2 << endl;
cout << "V1: " << V1 << endl;
corners.left_top.x = v1[0] / v1[2];
corners.left_top.y = v1[1] / v1[2];
//左下角(0,src.rows,1)
v2[0] = 0;
v2[1] = src.rows;
v2[2] = 1;
V2 = Mat(3, 1, CV_64FC1, v2); //列向量
V1 = Mat(3, 1, CV_64FC1, v1); //列向量
V1 = H * V2;
corners.left_bottom.x = v1[0] / v1[2];
corners.left_bottom.y = v1[1] / v1[2];
//右上角(src.cols,0,1)
v2[0] = src.cols;
v2[1] = 0;
v2[2] = 1;
V2 = Mat(3, 1, CV_64FC1, v2); //列向量
V1 = Mat(3, 1, CV_64FC1, v1); //列向量
V1 = H * V2;
corners.right_top.x = v1[0] / v1[2];
corners.right_top.y = v1[1] / v1[2];
//右下角(src.cols,src.rows,1)
v2[0] = src.cols;
v2[1] = src.rows;
v2[2] = 1;
V2 = Mat(3, 1, CV_64FC1, v2); //列向量
V1 = Mat(3, 1, CV_64FC1, v1); //列向量
V1 = H * V2;
corners.right_bottom.x = v1[0] / v1[2];
corners.right_bottom.y = v1[1] / v1[2];
}
int main(int argc, char *argv[])
{
//Mat image01 = imread("input1.JPG", 1); //右图
//Mat image02 = imread("input3.JPG", 1); //左图
Mat image01 = imread("/Users/superlinc/工作/xcode work/image_joint/2.png", 1); //右图
Mat image02 = imread("/Users/superlinc/工作/xcode work/image_joint/1.png", 1); //左图
imshow("p1", image01);
imshow("p2", image02);
//灰度图转换
Mat image1, image2;
cvtColor(image01, image1, COLOR_RGB2GRAY);
cvtColor(image02, image2, COLOR_RGB2GRAY);
//提取特征点
Ptr surf = xfeatures2d::SURF::create(2000);
//SurfFeatureDetector Detector(2000);
vector keyPoint1, keyPoint2;
surf->detect(image1, keyPoint1);
surf->detect(image2, keyPoint2);
//特征点描述,为下边的特征点匹配做准备
//SurfDescriptorExtractor Descriptor;
Mat imageDesc1, imageDesc2;
surf->compute(image1, keyPoint1, imageDesc1);
surf->compute(image2, keyPoint2, imageDesc2);
FlannBasedMatcher matcher;
vector > matchePoints;
vector GoodMatchePoints;
vector train_desc(1, imageDesc1);
matcher.add(train_desc);
matcher.train();
matcher.knnMatch(imageDesc2, matchePoints, 3);
cout << "total match points: " << matchePoints.size() << endl;
// Lowe's algorithm,获取优秀匹配点
for (int i = 0; i < matchePoints.size(); i++)
{
if (matchePoints[i][0].distance < 0.4 * matchePoints[i][1].distance)
{
GoodMatchePoints.push_back(matchePoints[i][0]);
}
}
Mat first_match;
drawMatches(image02, keyPoint2, image01, keyPoint1, GoodMatchePoints, first_match);
imshow("first_match ", first_match);
vector imagePoints1, imagePoints2;
for (int i = 0; i < GoodMatchePoints.size(); i++)
{
imagePoints2.push_back(keyPoint2[GoodMatchePoints[i].queryIdx].pt);
imagePoints1.push_back(keyPoint1[GoodMatchePoints[i].trainIdx].pt);
}
//获取图像1到图像2的投影映射矩阵 尺寸为3*3 寻找从右边到左边的矩阵变换
Mat homo = findHomography(imagePoints1, imagePoints2, FM_RANSAC);
也可以使用getPerspectiveTransform方法获得透视变换矩阵,不过要求只能有4个点,效果稍差
//Mat homo=getPerspectiveTransform(imagePoints1,imagePoints2);
cout << "变换矩阵为:\n" << homo << endl << endl; //输出映射矩阵
//计算配准图的四个顶点坐标
CalcCorners(homo, image01);
cout << "left_top:" << corners.left_top << endl;
cout << "left_bottom:" << corners.left_bottom << endl;
cout << "right_top:" << corners.right_top << endl;
cout << "right_bottom:" << corners.right_bottom << endl;
//图像配准
Mat imageTransform1, imageTransform2;
//右边转到左边 矩阵变换
warpPerspective(image01, imageTransform1, homo, Size(MAX(corners.right_top.x, corners.right_bottom.x), image02.rows));
//warpPerspective(image01, imageTransform2, adjustMat*homo, Size(image02.cols*1.3, image02.rows*1.8));
imshow("直接经过透视矩阵变换", imageTransform1);
//创建拼接后的图,需提前计算图的大小
int dst_width = imageTransform1.cols; //取最右点的长度为拼接图的长度
int dst_height = image02.rows;
Mat dst(dst_height, dst_width, CV_8UC3);
dst.setTo(0);
imageTransform1.copyTo(dst(Rect(0, 0, imageTransform1.cols, imageTransform1.rows)));
image02.copyTo(dst(Rect(0, 0, image02.cols, image02.rows)));
imshow("b_dst", dst);
OptimizeSeam(image02, imageTransform1, dst);
imshow("dst", dst);
waitKey();
return 0;
}
//优化两图的连接处,使得拼接自然
void OptimizeSeam(Mat& img1, Mat& trans, Mat& dst)
{
int start = MIN(corners.left_top.x, corners.left_bottom.x);//开始位置,即重叠区域的左边界
double processWidth = img1.cols - start;//重叠区域的宽度
int rows = dst.rows;
int cols = img1.cols; //注意,是列数*通道数
double alpha = 1;//img1中像素的权重
for (int i = 0; i < rows; i++)
{
uchar* p = img1.ptr(i); //获取第i行的首地址
uchar* t = trans.ptr(i);
uchar* d = dst.ptr(i);
for (int j = start; j < cols; j++)
{
//如果遇到图像trans中无像素的黑点,则完全拷贝img1中的数据
if (t[j * 3] == 0 && t[j * 3 + 1] == 0 && t[j * 3 + 2] == 0)
{
alpha = 1;
}
else
{
//img1中像素的权重,与当前处理点距重叠区域左边界的距离成正比,实验证明,这种方法确实好
alpha = (processWidth - (j - start)) / processWidth;
}
d[j * 3] = p[j * 3] * alpha + t[j * 3] * (1 - alpha);
d[j * 3 + 1] = p[j * 3 + 1] * alpha + t[j * 3 + 1] * (1 - alpha);
d[j * 3 + 2] = p[j * 3 + 2] * alpha + t[j * 3 + 2] * (1 - alpha);
}
}
}
测试结果