Intel Realsense D435深度精度测试
文章目录
-
- 数据分析:
-
- 500mm左右测量
-
- 4_1599623292.4111953.npz
-
- 像素点深度及拟合平面斜视图
- 像素点深度及拟合平面正视图
- 像素点深度及拟合平面俯视图
- 深度误差分布柱状图
- 深度误差分布x-y方向色彩映射图(非绝对值误差,考虑正向误差和负向误差)
- 深度误差分布x-y方向色彩映射图(非绝对值误差,考虑正向误差和负向误差)
- 代码
方法:通过采集Intel Realsense D435深度摄像头对一定深度范围内稳定平面的深度数据,去除掉黑洞及无效深度(指极端数值)后,将数据进行平面拟合,计算深度偏差,并绘制柱状图
数据分析:
500mm左右测量
4_1599623292.4111953.npz
| 文件名 | 深度分辨率 | 总点数量 | 有效点数量 | 拟合平面 |
|---|---|---|---|---|
| 4_1599623292.4111953.npz | 1280×720 | 921600 | 848866 | z = -0.000024 * x + 0.001717 * y + 471.447821 |
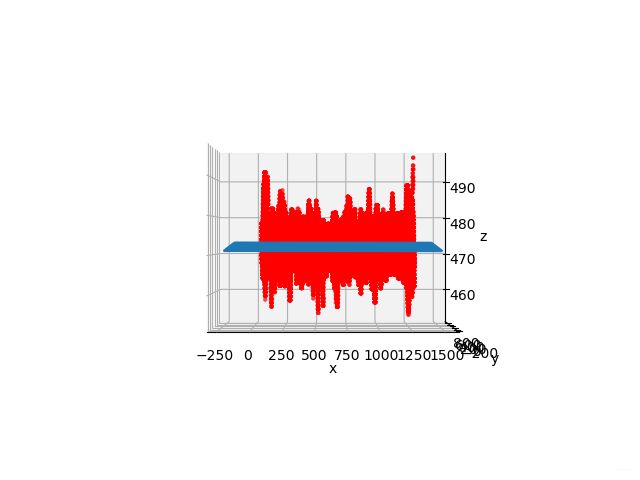
像素点深度及拟合平面斜视图

像素点深度及拟合平面正视图
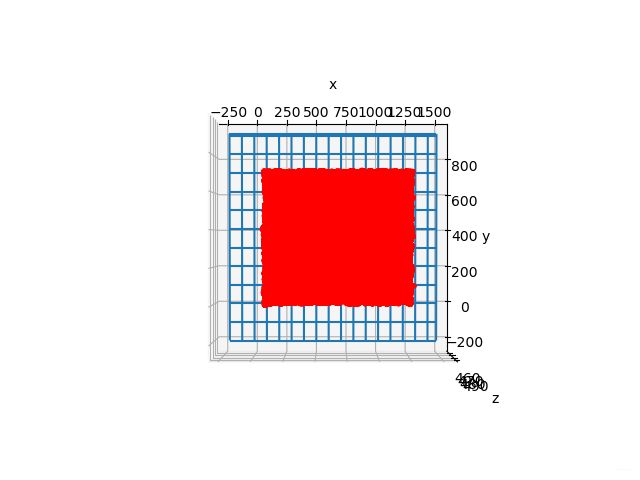
像素点深度及拟合平面俯视图
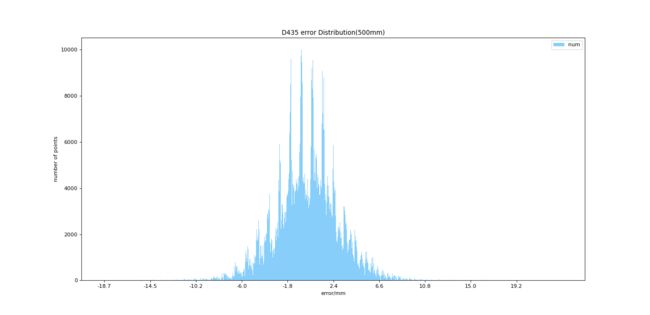
深度误差分布柱状图
深度误差分布x-y方向色彩映射图(非绝对值误差,考虑正向误差和负向误差)
蓝色代表负向误差,绿色代表中间数值(误差小),黄色代表正向误差,红色代表越限数值和空洞

深度误差分布x-y方向色彩映射图(非绝对值误差,考虑正向误差和负向误差)

蓝色代表误差小(无论正负),绿色到黄色代表误差逐渐增加,红色代表超限或空洞
代码
- 读取并存储Intel Realsense D435摄像头深度数据
# -*- coding: utf-8 -*-
"""
@File : 摄像头精度测试.py
@Time : 2020/9/7 10:49
@Author : Dontla
@Email : [email protected]
@Software: PyCharm
"""
import datetime
import time
from datetime import date
import pyrealsense2 as rs
import cv2 as cv
import numpy as np
import matplotlib.pyplot as plt
from mpl_toolkits.mplot3d import Axes3D
from numba import jit
def cam_reset():
'''循环reset摄像头'''
# hardware_reset()后是不是应该延迟一段时间?不延迟就会报错
print('\n', end='')
print('开始初始化摄像头:')
ctx = rs.context()
for dev in ctx.query_devices():
dev.hardware_reset()
# 像下面这条语句居然不会报错,不是刚刚才重置了dev吗?莫非区别在于没有通过for循环ctx.query_devices()去访问?
# 是不是刚重置后可以通过ctx.query_devices()去查看有这个设备,但是却没有存储设备地址?如果是这样,
# 也就能够解释为啥能够通过len(ctx.query_devices())函数获取设备数量,但访问序列号等信息就会报错的原因了
time.sleep(5)
print('摄像头{}初始化成功'.format(dev.get_info(rs.camera_info.serial_number)))
def fit_flat(x, y, z):
# 取样点数量
point_num = len(x)
print(point_num)
# 创建系数矩阵A
a = 0
A = np.ones((point_num, 3))
for i in range(0, point_num):
A[i, 0] = x[a]
A[i, 1] = y[a]
a = a + 1
# print(A)
# 创建矩阵b
b = np.zeros((point_num, 1))
a = 0
for i in range(0, point_num):
b[i, 0] = z[a]
a = a + 1
# print(b)
# 通过X=(AT*A)-1*AT*b直接求解
A_T = A.T
A1 = np.dot(A_T, A)
A2 = np.linalg.inv(A1)
A3 = np.dot(A2, A_T)
X = np.dot(A3, b)
print('平面拟合结果为:z = %.3f * x + %.3f * y + %.3f' % (X[0, 0], X[1, 0], X[2, 0]))
# 计算方差
R = 0
for i in range(0, point_num):
R = R + (X[0, 0] * x[i] + X[1, 0] * y[i] + X[2, 0] - z[i]) ** 2
print('方差为:%.*f' % (3, R))
# 展示图像
fig1 = plt.figure()
ax1 = fig1.add_subplot(111, projection='3d')
ax1.set_xlabel("x")
ax1.set_ylabel("y")
ax1.set_zlabel("z")
ax1.scatter(x, y, z, c='r', marker='o')
x_p = np.linspace(0, 1500, 150)
y_p = np.linspace(0, 1500, 150)
x_p, y_p = np.meshgrid(x_p, y_p)
z_p = X[0, 0] * x_p + X[1, 0] * y_p + X[2, 0]
ax1.plot_wireframe(x_p, y_p, z_p, rstride=10, cstride=10)
plt.show()
def run_cam():
ctx = rs.context()
pipeline = rs.pipeline(ctx)
cfg = rs.config()
cfg.enable_stream(rs.stream.depth, 1280, 720, rs.format.z16, 30)
cfg.enable_stream(rs.stream.color, 1280, 720, rs.format.bgr8, 30)
profile = pipeline.start(cfg)
try:
count = 0
while True:
fs = pipeline.wait_for_frames()
# color_frame = fs.get_color_frame()
depth_frame = fs.get_depth_frame()
# print(type(depth_frame)) # - 加载深度数据并绘制相关数据图表
# -*- coding: utf-8 -*-
"""
@File : 测试拟合平面.py
@Time : 2020/9/8 9:23
@Author : Dontla
@Email : [email protected]
@Software: PyCharm
"""
import numpy as np
import matplotlib.pyplot as plt
from mpl_toolkits.mplot3d import Axes3D
from numba import jit
import cv2 as cv
# 加载数据
def load_data(file_path):
# 读取数据
npzfile = np.load(file_path)
# x, y, z = npzfile['arr_0'], npzfile['arr_1'], npzfile['arr_2']
return npzfile['x'], npzfile['y'], npzfile['z']
# 计算拟合片面
def cal_flat(x_, y_, z_):
# 取样点数量
point_num = len(x_)
print('len={}'.format(point_num))
# 创建系数矩阵A
a = 0
A = np.ones((point_num, 3))
for i in range(0, point_num):
A[i, 0] = x_[a]
A[i, 1] = y_[a]
a = a + 1
# print(A)
# 创建矩阵b
b = np.zeros((point_num, 1))
a = 0
for i in range(0, point_num):
b[i, 0] = z_[a]
a = a + 1
# print(b)
# 通过X=(AT*A)-1*AT*b直接求解
A_T = A.T
A1 = np.dot(A_T, A)
A2 = np.linalg.inv(A1)
A3 = np.dot(A2, A_T)
X = np.dot(A3, b)
print('平面拟合结果为:z = %.6f * x + %.6f * y + %.6f' % (X[0, 0], X[1, 0], X[2, 0]))
# 计算方差
R = 0
for i in range(0, point_num):
R = R + (X[0, 0] * x_[i] + X[1, 0] * y_[i] + X[2, 0] - z_[i]) ** 2
print('方差为:%.*f' % (3, R))
return X
# 绘制三维深度散点图及拟合平面
def show_flat(X):
# 展示图像
fig1 = plt.figure()
ax1 = fig1.add_subplot(111, projection='3d')
ax1.set_xlabel("x")
ax1.set_ylabel("y")
ax1.set_zlabel("z")
# 设定视角
# print('ax.azim {}'.format(ax1.azim)) # -60
# print('ax.elev {}'.format(ax1.elev)) # 30
# 正视图
# elev, azim = 0, -90
# 俯视图
# elev, azim = 90, -90
# ax1.view_init(elev, azim) # 设定视角
# ax1.scatter(x, y, z, c='r', marker='o')
ax1.scatter(x, y, z, c='r', marker='.')
x_p = np.linspace(-200, 1480, 168)
y_p = np.linspace(-200, 920, 112)
x_p, y_p = np.meshgrid(x_p, y_p)
z_p = X[0, 0] * x_p + X[1, 0] * y_p + X[2, 0]
ax1.plot_wireframe(x_p, y_p, z_p, rstride=10, cstride=10)
plt.show()
# 计算深度误差
def cal_error_distribution(x_, y_, z_, coefficient_):
# 计算误差
error = z_ - (coefficient_[0, 0] * x_ + coefficient_[1, 0] * y_ + coefficient_[2, 0])
return error
# 统计各个区间误差的数量
def count_error_number(depth_error_, column_num):
# 提取负向最大深度误差和正向最大深度误差
error_max = np.max(depth_error)
# print(error_max) # 23.39967553034205
error_min = np.min(depth_error)
# print(error_min) # -18.65760653439031
# 柱子宽度
error_width = (error_max - error_min) / column_num
# print(column_width) # 1.6822912825892944
# 创建柱子高度序列
column_height_sequence = np.zeros(column_num)
# 统计每个柱子包含深度点的数量
for error in depth_error_:
index = int((error - error_min) // error_width)
# 当深度误差error等于最大深度误差的时候,下标会溢出,所以要加个判断限制一下
if index == column_num:
# print(dep) # 23.39967553034205
index -= 1
column_height_sequence[index] += 1
# print(column_height_sequence)
return column_height_sequence
# 绘制柱状图
def draw_histogram(column_height_sequence_):
# 创建一个点数为 8 x 6 的窗口, 并设置分辨率为 80像素/每英寸
plt.figure(figsize=(10, 10), dpi=80)
# plt.figure()
# 再创建一个规格为 1 x 1 的子图
# plt.subplot(1, 1, 1)
# 柱子总数
N = len(column_height_sequence)
# 包含每个柱子对应值的序列
values = column_height_sequence_
# 包含每个柱子下标的序列
index = np.arange(N)
# 柱子的宽度
width = 1
# 绘制柱状图, 每根柱子的颜色为紫罗兰色
# p2 = plt.bar(index, values, width, label="num", color="#87CEFA")
p2 = plt.bar(index, values, width, label="num", color="#87CEFA")
# 设置横轴标签
plt.xlabel('error/mm')
# 设置纵轴标签
plt.ylabel('number of points')
# 添加标题
plt.title('D435 error Distribution(500mm)')
# 添加纵横轴的刻度
index_new = []
for index_ in index:
if index_ % 100 == 0:
index_new.append(index_)
# print(index_new)
index_new_content = []
for index in index_new:
error_max = np.max(depth_error)
error_min = np.min(depth_error)
index_new_content.append(error_min + (error_max - error_min) * index / N)
index_new_content_string = [str(i) for i in np.around(index_new_content, decimals=1)]
# plt.xticks(index, (
# 'mentioned1cluster', 'mentioned2cluster', 'mentioned3cluster', 'mentioned4cluster', 'mentioned5cluster',
# 'mentioned6cluster', 'mentioned7cluster', 'mentioned8cluster', 'mentioned9cluster', 'mentioned10cluster'))
plt.xticks(index_new, index_new_content_string)
# plt.yticks(np.arange(0, 10000, 10))
# 添加图例
plt.legend(loc="upper right")
plt.show()
# 使用opencv绘制误差x-y方向(非绝对值)分布图
def draw_tangential_distribution_opencv(x_, y_, depth_error_):
error_max2min = np.max(depth_error_) - np.min(depth_error_)
error_array = np.ones((720, 1280)) * error_max2min
error_min = np.min(depth_error_)
for i in range(len(x_)):
error_array[y_[i], x_[i]] = depth_error_[i] - error_min # 全转换为正的,好画图
alp = 255 / error_max2min
error_image = cv.applyColorMap(cv.convertScaleAbs(error_array, alpha=alp), cv.COLORMAP_JET)
cv.imshow('window', error_image)
cv.waitKey(0)
# 使用opencv绘制误差x-y方向(绝对值)分布图
def draw_tangential_distribution_opencv_abs(x_, y_, depth_error_):
error_max2min = np.max(depth_error_) - np.min(depth_error_)
error_array = np.ones((720, 1280)) * error_max2min
for i in range(len(x_)):
error_array[y_[i], x_[i]] = depth_error_[i]
error_array_abs = np.abs(error_array)
max_abs = np.maximum(np.abs(np.min(depth_error_)), np.abs(np.max(depth_error_)))
alp = 255 / max_abs
error_image = cv.applyColorMap(cv.convertScaleAbs(error_array_abs, alpha=alp), cv.COLORMAP_JET)
cv.imshow('window', error_image)
cv.waitKey(0)
if __name__ == '__main__':
# 加载数据
x, y, z = load_data('./data/1000mm/4_1599635389.3573992.npz')
# 拟合平面并返回平面函数系数
coefficient = cal_flat(x, y, z)
# 绘制平面及深度散点
show_flat(coefficient)
# 计算深度误差
depth_error = cal_error_distribution(x, y, z, coefficient)
# 统计各个误差区间的数量(柱状图各个柱子高度)
column_height_sequence = count_error_number(depth_error, 1000)
# 绘制柱状图
draw_histogram(column_height_sequence)
# 用opencv绘制误差x-y方向分布图(非绝对值)
draw_tangential_distribution_opencv(x, y, depth_error)
# 用opencv绘制误差x-y方向分布图(绝对值)
draw_tangential_distribution_opencv_abs(x, y, depth_error)

