Arduino实例2——快乐肥宅机
最近发现了两个特别有趣的传感器,一个是巡线传感器,一个是非接触式液位传感器。
有一次,我在思考有什么传感器能够检测到前面很近的距离是否有阻挡时,或者是在传送带上检测面前是否有需要处理的工件的时候,看了很久都没有找到合适。有天,我突然看到DF出的这款巡线传感器,就是它了

这款巡线传感器,通常是用在小车上的,而这次它将在这次的制作里大放光彩。除了巡线,它还有更大的用处,因为它拥有一项必杀技
——能够检测0-2cm的前方是否有阻挡。产品资料上写的是1-2cm,而我使用手指和其他物品去实际测试,结果是能够检测前方0-2cm内的阻挡。这意味着它,你用手指去摁它,它能作为一个开关;如果你用一个东西放在它前面2cm内,它又能够判断前面是否存在目标。它相对于激光对射等方案,便宜又十分实用,安装简单,对使用场景的空间没有要求。我本人实在是相当喜爱这款传感器。
还有一个非接触式的液位检测传感器,比较有意思

产品资料教咱们这样去使用它,就是贴在容器外壁上来检测水位
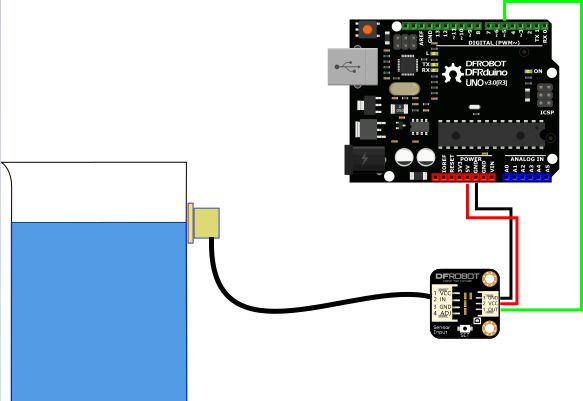
这个液位传感器带有
4个档位的设置,可以调节对液位的敏感程度,我猜测它应该是电容原理的,你如果用手去接触它,它也会给出“这个位置有液体”的信号。实际测试,当把液位传感器的档位调至最灵敏的第4档时,比较有意思的现象就发生了,你的手或者装了水的杯子离传感器0-1cm左右就能被识别到。
把这两个传感器拉到一起,再加上电磁阀、步进电机
......一个小小的点子就糅合成型了。一款专门为肥宅量身定制的一个小机器——快乐肥宅机。当我这个肥宅独自抱着快乐肥宅水一饮而尽的时候,心里难免有些孤独失落,所以独乐乐不如众乐乐,索性制作一台倒饮料的机器,来解决“懒癌”晚期,懒得倒饮料的重大烦恼。这个快乐肥宅机,实乃快乐肥宅们的聚会、单身狗party的必备好物。



【视频演示】:
快乐肥宅机
喝快乐肥宅水,突然变得有仪式感了,感觉自己的生活品质得到了提升
制作思路:
这个小装置是通过对电阻触摸屏上的选项进行选择倒饮料的杯数,然后机器上的滑台就开始滑动,滑台的滑动是通过步进电机套上一个齿轮,搭配一个齿条,齿条转动带动齿条的线性运动,于是滑台就发生了线性滑动。滑台一边滑动,机器就一边检测相应位置上,是否有足够的杯子(巡线传感器来检测)和足够的饮料(液位传感器来检测),如果有足够的饮料,屏幕就直接显示“完成”,如果杯子不够,就显示“need cups!”。如果杯子数量够,而饮料杯数不够,机器就开始倒饮料,机器会移动到有空杯子的位置上,通过控制继电器来打开电磁阀,进行倒饮料。当饮料液面到达目标高度时,液位传感器就能检测到,立即关闭电磁阀,停止倒饮料,于是就完成了这杯饮料的倾倒。
以上为大致的制作思路,具体细节会在接下来制作中会详细说。
需要准备的材料:
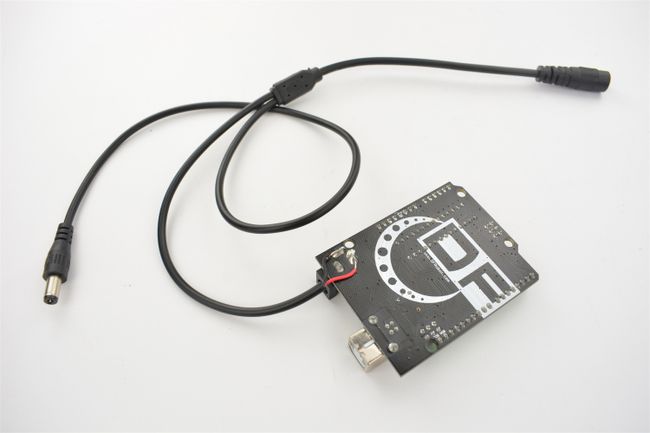
1. DFRduino UNO R3(含USB线|传感器扩展板)
2. 智能非接触式液位传感器
3. Mini巡线传感器V5.0
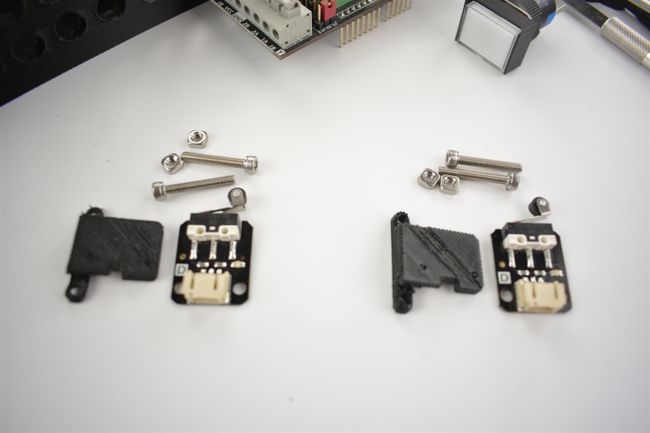
4. 碰撞传感器(左) 2个
5. 多彩发光自锁开关-白
6. 3.5" TFT触摸屏 4MB闪存
7. 12V常闭进水电磁阀-DN15
8. 42步进电机(Planet Gear Stepper Motor)
9. 步进电机驱动扩展板
10. 数字继电器模块(Arduino兼容)
11. 优质鳄鱼夹连接线
12. 高品质公母头跳线 21cm*30根
13. 单芯优质 杜邦线(10根) 母母头 2个
14. 12V电源
15. DC2.1一母头分两公头线
16. DC2.1 母头线
17. 内丝皮管接 4分x15
18. 可乐瓶快接夹头和奶嘴
19. 6分、4分内丝双垫堵垫 各1个
20. 正齿轮 1模45齿 内孔8 台阶35
21. 齿条 1模 12*12*380mm M4成品孔(间距100mm)
22. 线径0.6mm 5mm高度弹簧 18个
23. 玩具赛车小轮胎 直径18mm 孔径2mm 40个
24. 轮胎传动铁轴 2*18mm 20根
25. 若干螺丝(
1) 2个M3*8自攻螺丝,固定限位碰撞柱;
2) 4个M3*8圆头螺丝,固定电磁阀3D打印座和盖子)
3) 16个M3*20杯头螺丝,固定轮胎架
4) 4个M3*16杯头螺丝,固定碰撞传感器
5) 4个M3*12杯头螺丝,固定立柱上下两部分
6) 2个M3*8圆头螺丝,固定滑台左右两部分
7) 2个M3*8杯头螺丝,固定纸杯放置处
8) 4个M4*12杯头螺丝,固定滑台和齿条
9) 4个M3*8圆头螺丝,固定显示屏3D打印件和立柱
10) 4个M3*8圆头螺丝,固定步进电机和3D打印件座子
11) 1个M3*8自攻螺丝,固定巡线传感器
12) 4个M3*30杯头螺丝,固定立柱和底座部分
13) 4个M3*10杯头螺丝,固定托盘和底座部分
14) 50个 M3六角螺母
15) 10个M4六角螺母
)


下面开始制作:
建模:
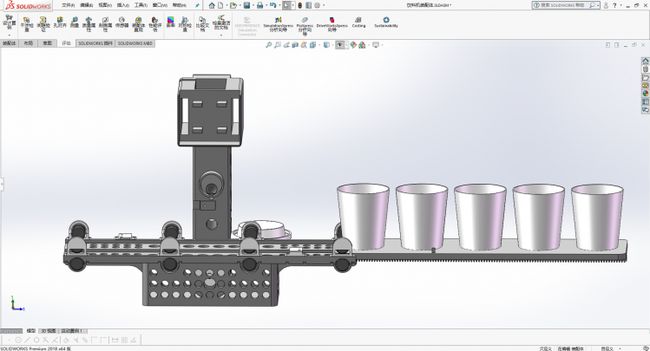
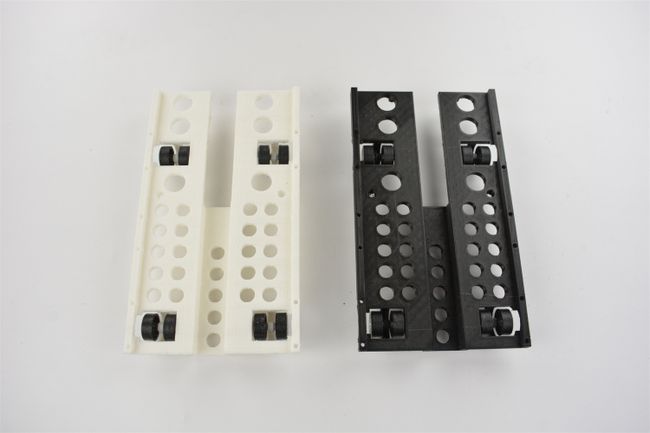
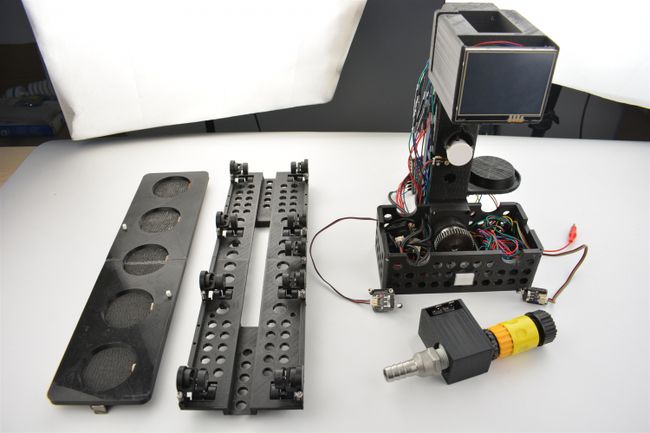
模型拆分后,3D打印(白色的部分,最终还是更换成了黑色):

下面进行3D打印件的组装:
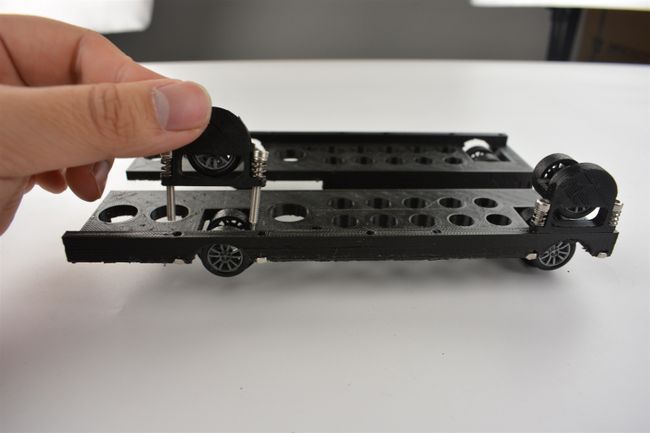
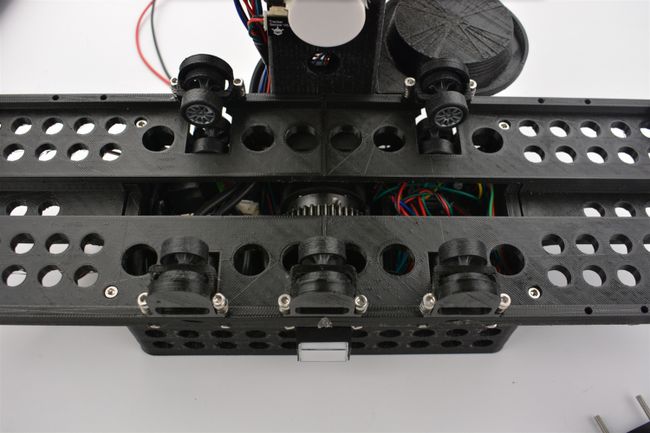
先组装9套轮胎架(图片为8套,少了一套)


将托盘上的8个位置,分别装上轮子,这个部分的轮子和轮胎架轮子上下将滑台夹住,使得滑台可以顺滑移动。底部的六角螺母是用来固定轮胎架的。

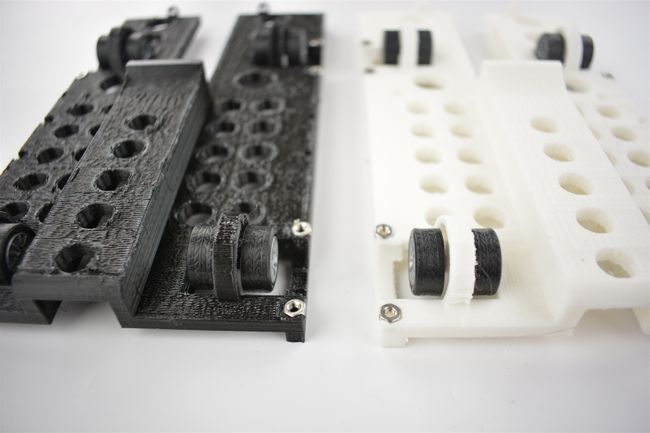
安装轮胎架,这里会用到两个弹簧。这两个弹簧的作用是,当滑台塞入时,轮胎架由于有弹簧的原因,会被滑台顶起来,这样可以允许滑台和托盘之间有些误差,确保滑台相对于托盘滑动时,不会有卡顿。


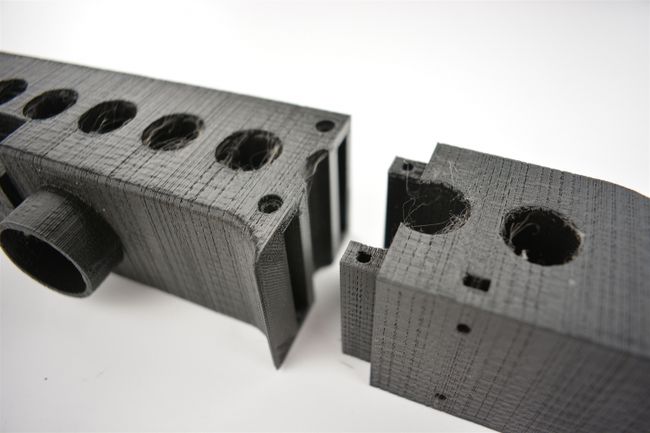
将滑台左右向部分两颗M3*8mm圆头螺丝固定为一体


将立柱上下两部分进行组合,然后用4颗M3*12的杯头螺丝固定


将纸杯放置处,安装在立柱侧边


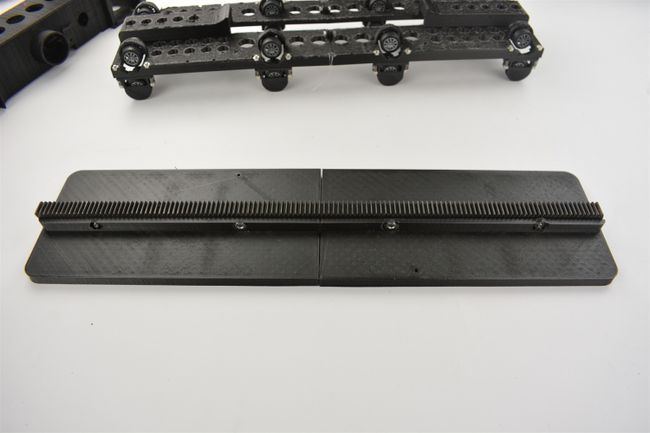
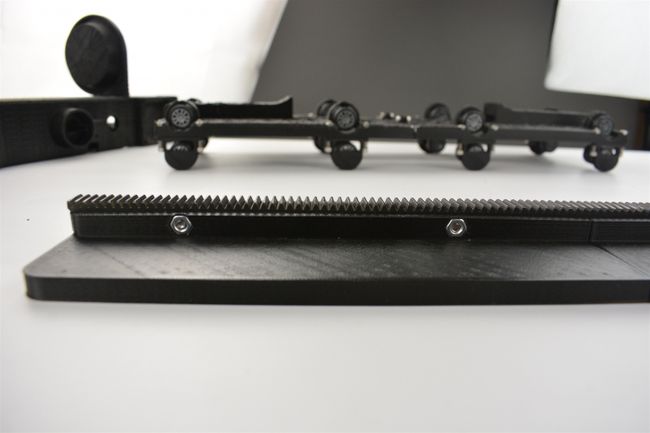
用4颗M4*12的杯头螺丝和螺母,将左右两部分固定在齿条上

用4个M3*8的圆头螺丝将电磁阀固定在打印件内


安装电磁阀和出水接头,中间通过一个堵垫,增加水密性


电磁阀上部分,是连接的快速接头的奶嘴部分。快速接头的夹持部分,通过一个6分的堵垫,直接连在饮料瓶上。奶嘴部分和夹持部分,连接十分方便,仅需用手向上提起黄色的夹持部分,然后连上橙色的奶嘴,然后松手,夹持部分就咬紧奶嘴了。便于更换新的饮料瓶。



将显示屏3D打印件和立柱通过4颗M3*8的圆头螺丝和螺母连接
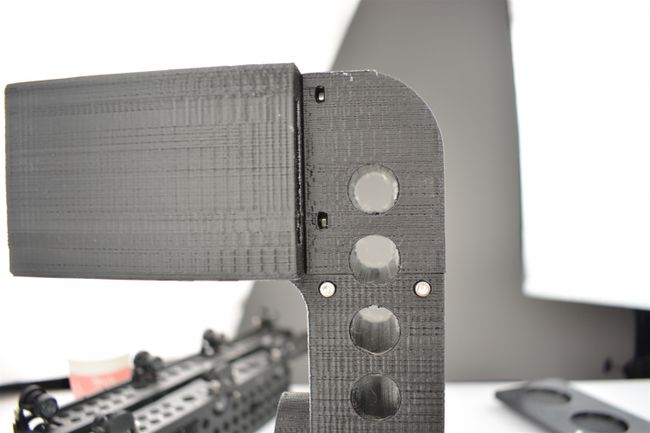


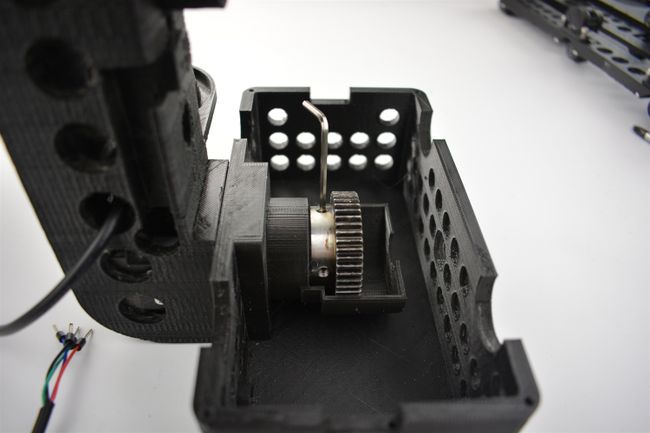
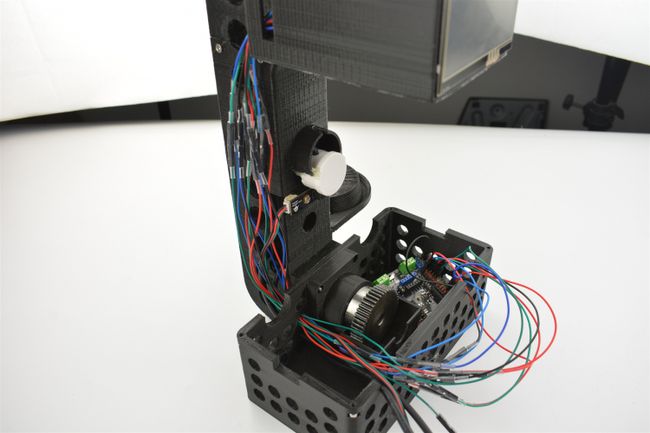
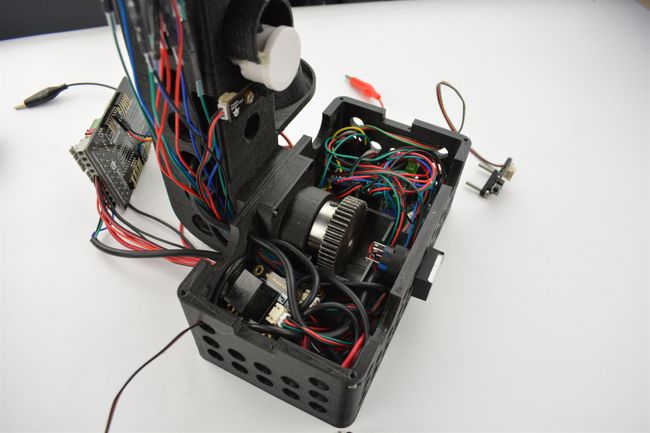
将步进电机穿过立柱,然后固定在底座上

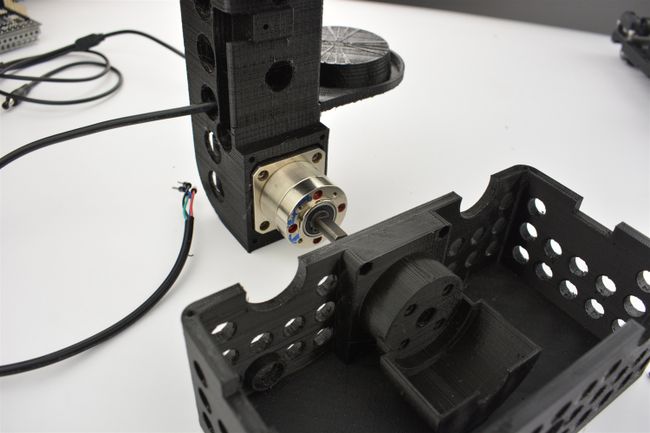
在步进电机的转轴上,套上齿轮,并用内六角扳手旋紧齿轮上的机米螺丝,使之咬紧步进电机的转轴

此时,虽然步进电机穿过立柱,与底座固定住了,但立柱与底座仍未固定。使用4颗M3*30杯头螺丝和螺母,固定二者
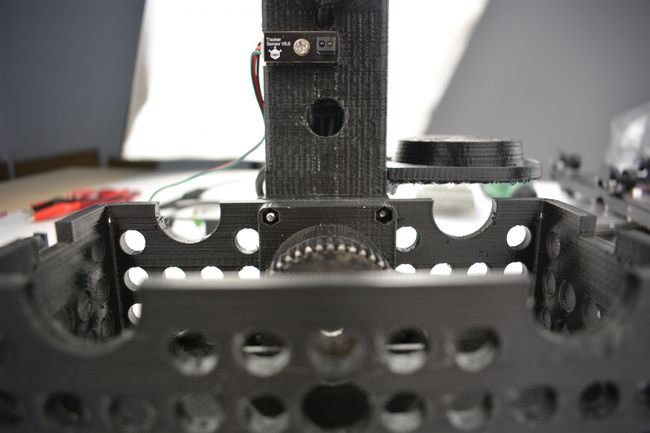

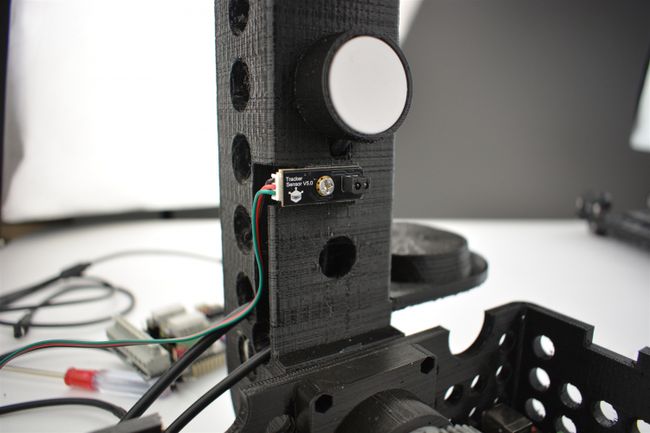
立柱上面,比较关键的两个传感器,一个是液位传感器,另一个是巡线传感器,安装它们。实际调试时,我发现液位传感器位置设计高了,最终,我调整了液位传感器的实际位置


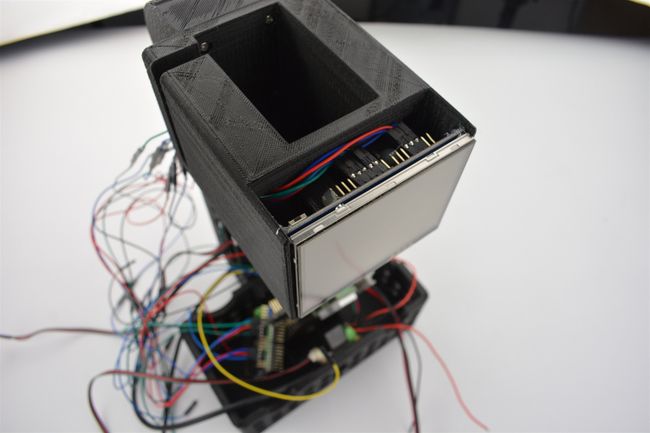
显示屏方面的安装,我使用的热熔胶直接固定在打印件上面。显示屏与UNO的连线,我使用的是2根公母头杜邦线加一根母母头杜邦线连接成一根长线,然后用它来连接显示屏和UNO。走线方面,打印件内部留有走线的孔径。
加工两个碰撞传感器,使用热熔胶将传感器固定在打印的专用座子上

在UNO的DC2.1座子引脚上,焊接上那条1分2的DC电源线的一头
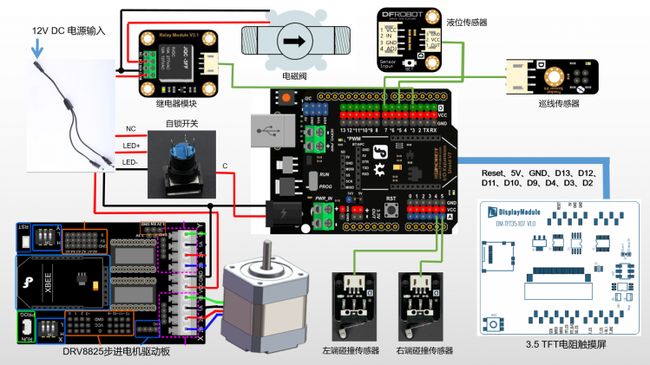
现将所有的传感器、驱动板,连接在UNO,按照下图进行连接。显示屏的线比较多,由于它作为UNO的扩展板形式进行生产的,所以在连线上,只要将那几个需要用到引脚,用线一一连接上即可
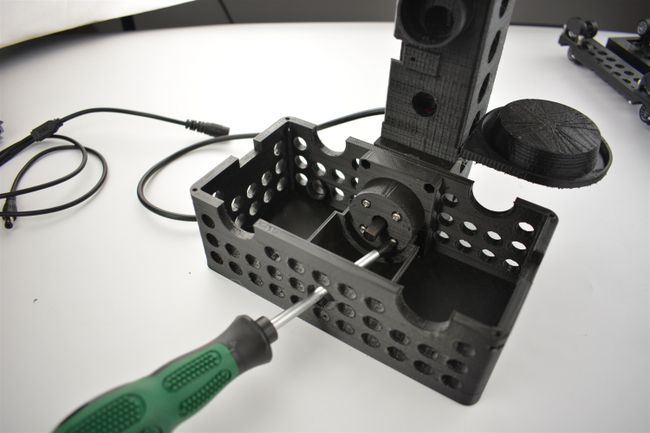
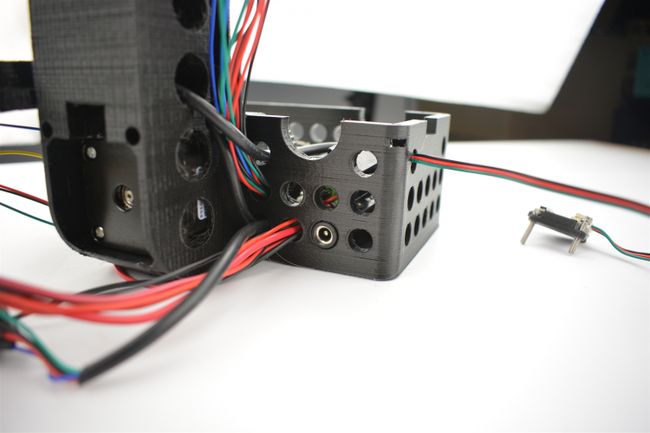
将线从底座的圆孔内穿出
将步进电机驱动板用热熔胶粘在立柱的背面

至此,连线部分就完成了
将托盘使用4个M3*10杯头螺丝和螺母,固定在底座上
将滑台塞入托盘后,再将左右各一个的碰撞传感器安装在托盘上,滑台上的白色碰撞柱和碰撞传感器组成了限位结构,保证滑台不会过度移动,甚至移动到托盘外去
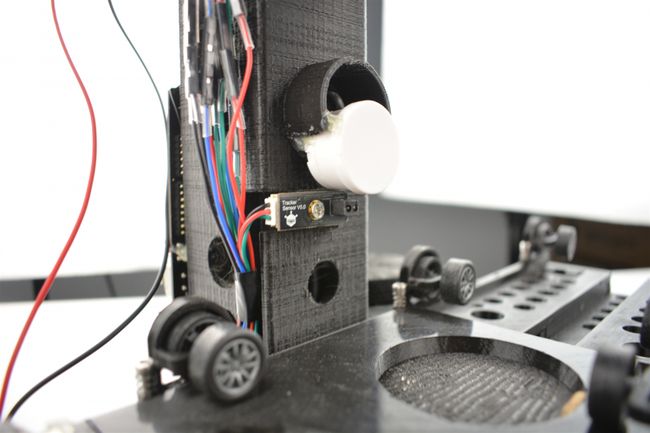

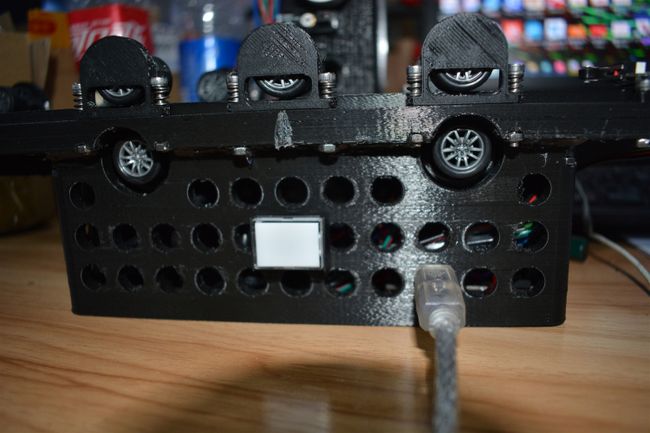
立柱上的两个传感器,可以稳当地收集它前方的纸杯的情况

我在底座上的正前方的圆孔里,将UNO的USB贴着内壁放置,可以比较方便地上传程序
最后将编写好的程序下载进去
制作就完成了
下面对快乐肥宅机进行演示一下
先通过这个快乐肥宅机为世界祈福吧
接下来,让机器倒3杯饮料,但是上面没有杯子,机器就显示“need cups!”
装上饮料瓶
夹上鳄鱼夹,为电磁阀通上12v,由继电器控制其通断
开机,并且机器复位
倾倒饮料的过程中
以上,是我想象中的情况。令我苦闷的是,当我最后组装完成肥宅快乐机时,我发现了一个致命的疏忽,使用到的电磁阀,它结构与我们日常使用的球阀不同。当继电器使电磁阀工作时,饮料瓶内的饮料并不会倒下来,视频中和动图里的快乐肥宅机能正常倒饮料,都是我帮忙的结果【笑哭】。这个坑,以后有机会再回来填吧,造孽啊。
