CPU的三种虚拟化机制
事实上,不同类型的虚拟化技术是从不同的地方开始引导虚拟机系统的:
- 从模拟的 BIOS 开始引导的,支持 MBR、EFI、PXE 等启动方式,如 QEMU、VMWare;
- 从内核开始引导的,虚拟机镜像内不包含内核,如 KVM、Xen;
- 从 init 进程开始引导的,虚拟机是一个与主机共享内核的容器,会按照操作系统的引导过程启动各种系统服务,如 LXC、OpenVZ;
- 只运行一个特定的应用程序或服务的,也是基于容器,如 Docker。
/dev/kvm提供的操作包括:
• 创建一个新的虚拟机
• 向一个虚拟机中分配内存
• 读写虚拟cpu寄存器
• 向一个虚拟cpu中注入中断
• 运行一个虚拟cpu


CPU硬件辅助虚拟化技术
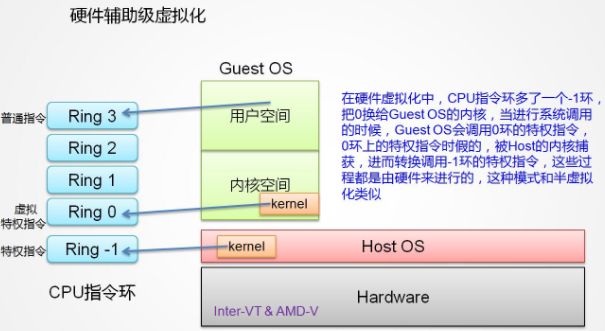
目前主要有Intel的VT-x和AMD的AMD-V这两种技术。其核心思想都是通过引入新的指令和运行模式,使VMM和Guest OS分别运行在不同模式(ROOT模式和非ROOT模式)下,且Guest OS运行在Ring 0下。通常情况下,Guest OS的核心指令可以直接下达到计算机系统硬件执行,而不需要经过VMM。当Guest OS执行到特殊指令的时候,系统会切换到VMM,让VMM来处理特殊指令。
1、Intel VT-x技术
为弥补x86处理器的虚拟化缺陷,市场的驱动催生了VT-x,Intel推出了基于x86架构的硬件辅助虚拟化技术Intel VT(Intel Virtualization Technology)。
目前,Intel VT技术包含CPU、内存和I/O三方面的虚拟化技术。
- CPU硬件辅助虚拟化技术,分为对应安腾架构的VT-i(Intel Virtualization Technology for ltanium)和对应x86架构的VT-x(Intel Virtualization Technology for x86)。
- 内存硬件辅助虚拟化技术包括EPT(Extended Page Table)技术。
- I/O硬件辅助虚拟化技术的代表VT-d(Intel Virtualization Technology for Directed I/O)。
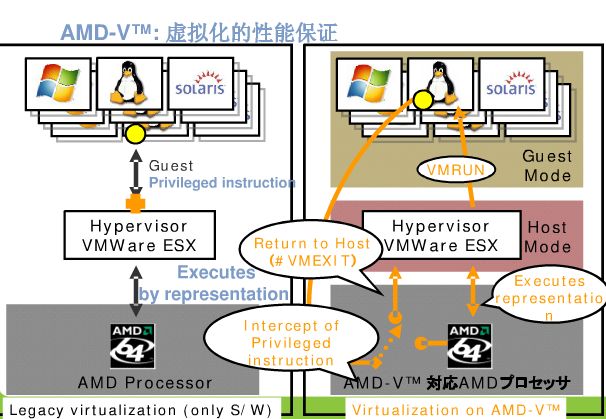
Intel VT-x技术解决了早期x86架构在虚拟化方面存在的缺陷,可使未经修改的Guest OS运行在特权级0,同时减少VMM对Guest OS的干预。Intel VT-d技术通过使VMM将特定I/O设备直接分配给特定的Guest OS,减少VMM对I/O处理的管理,不但加速数据传输,且消除了大部分性能开销。如下图所示。CPU硬件辅助虚拟化技术简要说明流程图:

效法IBM 大型机,VT-x提供了2 个运行环境:根(Root)环境和非根(Non-root)环境。根环境专门为VMM准备,很像原来没有VT-x 的x86,只是多了对VT-x 支持的几条指令。非根环境作为一个受限环境用来运行多个虚拟机。
如上图所示,根操作模式与非根操作模式都有相应的特权级0至特权级3。VMM运行在根模式的特权级0,GuestOS的内核运行在非根模式的特权级0,GuestOS的应用程序运行在非根模式的特权级3。运行环境之间相互转化,从根环境到非根环境叫VMEntry;从非根环境到根环境叫VMExit。VT-x定义了VMEntry操作,使CPU由根模式切换到非根模式,运行客户机操作系统指令。若在非根模式执行了敏感指令或发生了中断等,会执行VMExit操作,切换回根模式运行VMM。
根模式与非根模式之问的相互转换是通过VMX操作实现的。VMM 可以通过VMXON 和VMXOFF打开或关闭VT-x。如下图所示:
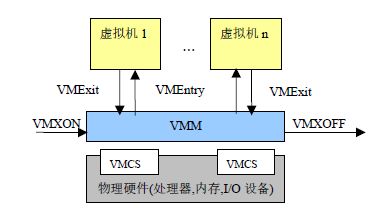
VMX操作模式流程:
1)、VMM执行VMXON指令进入VMX操作模式。
2)、VMM可执行VMLAUNCH指令或VMRESUME指令产生VM Entry操作,进入到Guest OS,此时CPU处于非根模式。
3)、Guest OS执行特权指令等情况导致VMExit的发生,此时将陷入VMM,CPU切换为根模式。VMM根据VMExit的原因作出相应处理,处理完成后将转到2),继续运行GuestOS。
4)、VMM可决定是否退出VMX操作模式,通过执行VMXOFF指令来完成。
为更好地支持CPU虚拟化,VMX新定义了虚拟机控制结构VMCS(Virtual Machine ControlStructure)。VMCS是保存在内存中的数据结构,其包括虚拟CPU的相关寄存器的内容及相关的控制信息。CPU在发生VM Entry或VMExit时,都会查询和更新VMCS。VMM也可通过指令来配置VMCS,达到对虚拟处理器的管理。VMCS架构图如下图所示:

每个虚拟处理器都需将VMCS与内存中的一块区域联合起来,此区域称为VMCS区域。对VMCS区域的操纵是通过VMCS指针来实现的,这个指针是一个指向VMCS的64位的地址值。VMCS区域是一个最大不超过4KB的内存块,且需4KB对齐。
VMCS区域分为三个部分:
- 偏移0起是VMCS版本标识,通过不同的版本号,CPU可维护不同的VMCS数据格式;
- 偏移4起是VMX中止指示器,在VMX中止发生时,CPU会在此处存入中止的原因;
- 偏移8起是VMCS数据区,这一部分控制VMX非根操作及VMX切换。
VMCS 的数据区包含了VMX配置信息:VMM在启动虚拟机前配置其哪些操作会触发VMExit。VMExit 产生后,处理器把执行权交给VMM 以完成控制,然后VMM 通过指令触发VMEntry 返回原来的虚拟机或调度到另一个虚拟机。
VMCS 的数据结构中,每个虚拟机一个,加上虚拟机的各种状态信息,共由3个部分组成,如之前的VMCS架构图所示:
1) Gueststate:该区域保存了虚拟机运行时的状态,在VMEntry 时由处理器装载;在VMExit时由处理器保存。它又由两部分组成:
-
Guest OS寄存器状态。它包括控制寄存器、调试寄存器、段寄存器等各类寄存器的值。
-
Guest OS非寄存器状态。用它可以记录当前处理器所处状态,是活跃、停机(HLT)、关机(Shutdown)还是等待启动处理器间中断(Startup-IPI)。
2) Hoststate:该区域保存了VMM 运行时的状态,主要是一些寄存器值,在VMExit 时由处理器装载。
3) Control data:该区域包含几部分数据信息,分别是:
-
虚拟机执行控制域(VM-Execution control fields)。VMM 主要通过配置该区域来控制虚拟机在非根环境中的执行行为。基于针脚的虚拟机执行控制。它决定在发生外部中断或不可屏蔽中断(NMI)要不要发生VMExit。基于处理器的虚拟机执行控制。它决定虚拟机执行RDTSC、HLT、INVLPG 等指令时要不要发生VMExit。
-
VMExit 控制域(VMExit control fields)。该区域控制VMExit 时的行为。当VMExit 发生后处理器是否处于64 位模式;当因为外部中断发生VMExit 时,处理器是否响应中断控制器并且获得中断向量号。VMM 可以用它来定制当VMExit 发生时要保存哪些MSR 并且装载哪些MSR。MSR是CPU的模式寄存器,设置CPU的工作环境和标识cpu的工作状态。
-
VMEntry 控制域(VMEntry control fields)。该区域控制VMEntry 时的行为。它决定处理器VMEntry 后是否处于IA-32e 模式。与VMExit 的MSR控制类似,VMM 用它来定制当VMEntry 发生时要装载哪些MSR。VMM 可以配置VMEntry 时通过虚拟机的IDT向其发送一个事件。在此可以配置将使用IDT 的向量、中断类型(硬件或软件中断)、错误码等。
-
VMExit 信息域(VMExit information fields)。该只读区域包括最近一次发生的VMExit 信息。试图对该区域执行写操作将产生错误。。此处存放VMExit 的原因以及针对不同原因的更多描述信息、中断或异常向量号、中断类型和错误码、通过 IDT 发送事件时产生的VMExit 信息、指令执行时产生的 VMExit 信息。
有了VMCS结构后,对虚拟机的控制就是读写VMCS结构。后面对vCPU设置中断,检查状态实际上都是在读写VMCS数据结构。
2、AMD-V技术
我们在上面小节介绍了 Intel 的硬件辅助虚拟化技术,那么 AMD 的硬件辅助虚拟化技术又有什么特点呢?AMD 从 2006 年便开始致力于硬件辅助虚拟化技术的研究,AMD-V全称是AMD Virtualization,AMD-V从代码的角度分别称为 AMD和 SVM,AMD开发这项虚拟化技术时的内部项目代码为Pacifica,是AMD推出的一种硬件辅助虚拟化技术。
Intel VT-x 和 AMD-V 提供的特征大多功能类似,但名称可能不一样,如 Intel VT-x 将用于存放虚拟机状态和控制信息的数据结构称为 VMCS, 而 AMD-V 称之为VMCB; Intel VT-x 将 TLB 记录中用于标记 VM 地址空间的字段为 VPID, 而AMD-V 称之为 ASID; Intel VT-x 将二级地址翻译称之为 EPT, AMD 则称为 NPT,等等一些区别。尽管其相似性,Intel VT-x 和 AMD-V 在实现上对 VMM 而言是不兼容的。
AMD-V 在 AMD 传统的x86-64 基础上引入了“guest”操作模式。“guest”操作模式就是 CPU 在进入客操作系统运行时所处的模式。 “guest”操作模式为客操作系统设定了一个不同于 VMM 的运行环境而不需要改变客操作系统已有的 4 个特权级机制,也就是说在“guest”模式下,客操作系统的内核仍然运行在 Ring 0, 用户程序仍然在 Ring 3。 裸机上的操作系统和 VMM 所在的操作模式依然和传统的 x86 中一样,且称之为“host”操作模式。 VMM 通过执行 VMRUN 指令使CPU 进入“guest”操作模式而执行客操作系统的代码; 客操作系统在运行时,遇到敏感指令或事件,硬件就执行 VMEXIT 行为,使 CPU 回到“host”模式而执行 VMM 的代码。 VMRUN 指令运行的参数是一个物理地址指针,其指向一个 Virtual Machine Control Block (VMCB) 的内存数据结构, 该数据结构包含了启动和控制一个虚拟机的全部信息。

“guest”模式的意义在于其让客操作系统处于完全不同的运行环境,而不需要改变客操作系统的代码。“guest”模式的设立在系统中建立了一个比 Ring 0 更强的特权控制,即客操作系统的 Ring 0 特权必须让位于 VMM 的 Ring 0 特权。客操作系统上运行的那些特权指令,即便是在 Ring 0 上也变的可以被 VMM 截取的了,“Ring Deprivileging”由硬件自动搞定。此外,VMM 还可以通过 VMCB 中的各种截取控制字段选择性的对指令和事情进行截取,或设置有条件的截取,所有的敏感的特权或非特权指令都在其控制之中。
VMCB 数据结构主要包含如下内容 :
1. 用于描述需要截取的指令或事件的字段列表。其中 :
-
2 个 16 位的字段用于控制对 CR 类控制寄存器读写的截取
-
2 个 16 位的字段用于控制对 DR 类调试寄存器的读写的截取
-
一个 32 位的字段用于控制 exceptions 的截取
-
一个 64 位的字段用于控制各种引起系统状态变化的事件或指令的截取,如 INTR, NMI, SMI 等事 件, HLT, CPUID,INVD/WBINVD,INVLPG/INVLPGA,MWAIT 等指令, 还包括两位分别标志是否对 IO 指令和 MSR 寄存器的读写进行控制
-
指向IO端口访问控制位图和MSR读写控制位图的物理地址指针字段。该位图用于差别性地控制虚拟机对不同的 IO 端口和 MSR 寄存器进行读写访问。
-
描述虚拟机CPU状态的信息。包含除通用寄存器外的大部分控制寄存器,段寄存器,描述符表寄存器,代码指针等。 RAX 寄存器也在其中,因为 RAX 在 VMM 执行 VMRUN 时是用来存放VMCB 物理地址的。 对于段寄存器,该信息中还包含段寄存器对应的段描述符,也就那些传统 x86 上对软件隐藏的信息。
-
对虚拟机的执行进行控制的字段。主要是控制虚拟机中断和 NPT 的字段。
-
指示虚拟机进入“guest”模式后要执行的行动的字段。包括用来描述 VMM 向虚拟机注入的中断或异常的信息的字段。 注入的中断或异常在 VMRUN 进入“guest”模式后立即执行,就象完全发生在虚拟机内一样。
-
提供VMEXIT信息的字段。包括导致 VMEXIT 的事件的代码,异常或中断的号码,page fault 的线性地址,被截获的指令的编码等。

VMCB 以及其涉及的控制位图,完全通过物理地址进行指向,这就避免了“guest”和“host”模式切换的过程依赖于“guest”空间的线性地址 ( 传统操作系统内用户空间到内核的切换确实依赖于 IDT 中提供的目标的线性地址 ),使得 VMM 可以采用和客操作系统完全不同的地址空间。
VMCB 的内容在物理上被分成了俩部分,其中用于保存虚拟机 CPU 状态的信息占据 2048 字节的后半部分,我们可称之为 VMCB.SAVE; 其他信息,占据前 1024 字节范围,我们可称之为 VMCB.CONTROL。
VMRUN 命令以 VMCB 为参数,使CPU 进入“guest”状态, 按 VMCB.SAVE 的内容恢复虚拟机的 CPU 寄存器状态,并按 VMCB.SAVE 中 CS:RIP 字段指示的地址开始执行虚拟机 的代码, 并将之前 VMM 的 CPU 状态保存在MSR_VM_HSAVE_PA 寄存器所指向的物理内存区域中。VMRUN 所保存的 VMM 的 CPU状态的 CS:RIP 实际上就是 VMM 的代码中 VMCB 的下一个指令,当虚拟机因某种原因而导致 #VMEXIT 时,VMM 会从 VMRUN 后的一条指令开始执行。CPU 执行 #VMEXIT 行为时,会自动将虚拟机的状态保存到 VMCB.SAVE 区,并从 MSR_VM_HSAVE_PA 指定的区域加载 VMM 的 CPU 状态。
VMLOAD 和 VMSAVE 指令是对 VMRUN 的补充,他们用来加载和恢复一些并不需要经常使用的 CPU 状态,如 FS, GS, TR, LDTR 寄存器以及其相关的隐含的描述符寄存器的内容,VMLOAD 和 VMSAVE 可以让 VMM 的实现对“guest”进入和退出的过程进行优化,让多数情况下只使用 VMRUN 进行最少的状态保存和恢复。
VMMCALL 指令是 AMD-V 为客操作系统内核提供的明确的功能调用接口,类似于 syscall 指令 ( 从 Ring3 到 Ring 0), VMMCALL 让客操作系统直接执行 #VMEXIT 而进入 VMM,请求VMM 的服务。
3、总结
回顾一下CPU虚拟化技术的实现,纯软件的CPU虚拟化使用了陷入-模拟的模式来模拟特权指令,而在x86架构中由于只能模拟特权指令,无法模拟某些敏感指令而无法实现完全的虚拟化。(在x86架构中,特权指令一定是敏感指令,但是敏感指令比特权指令多,造成某系敏感指令不是特权指令而无法模拟,使得CPU虚拟化异常),而硬件辅助虚拟化引入了根模式(root operation)和非根模式(none-root operation),每种模式都有ring0-3的四级特权级别。所以,在硬件辅助虚拟化中,陷入的概念实际上被VM-EXIT操作取代了,它代表从非根模式退出到根模式,而从根模式切换到非根模式是VM-Entry操作。
CPU纯软件半虚拟化技术
在2003年出现的Xen,使用了另外的一种半虚拟化的方案来解决x86架构下CPU的敏感指令问题。主要采用Hypercall技术。Guest OS的部分代码被改变,从而使Guest OS会将和特权指令相关的操作都转换为发给VMM的Hypercall(超级调用),由VMM继续进行处理。而Hypercall支持的批处理和异步这两种优化方式,使得通过Hypercall能得到近似于物理机的速度。

1、Hypercall技术
对于x86体系结构CPU,Xen使用超级调用来替换被监控的操作,其中包括x86架构下的敏感指令。Xen所采用的超级替换的方法是一种全新的设计理念:它将问题的中心,由VMM移向Guest OS自身,通过主动的方式由Guest OS去处理这些指令,而不是被移交给VMM做处理,在这种设计理念下,修改Guest OS内核。
能修改Guest OS是半虚拟化的一个技术核心。通过修改Guest OS的内核。使Guest OS明确知道自己是运行在1环上,而不是通常OS的0环,有效的避免了虚拟化的执行冲突问题。Guest OS也清楚VMM给自己提供了一个虚拟的寄存器组,并能通过其他方式去访问他们,避免了访问冲突的问题。
解决了敏感指令问题只是解决了x86架构下的半虚拟化的第一步。运行在1环的操作系统没有权限执行的指令,交给0环的VMM来处理,这个很大程度上与应用程序的系统调用很类似:系统调用的作用是把应用程序无权执行的指令交给操作系统完成。因此,Xen向Guest OS提供了一套“系统调用”。以方便Guest OS调用,这部分”系统调用“就是超级调用Hypercall。
超级调用Hypercall的机制使用,不仅使x86架构的指令虚拟化得以实现,也为后面的内存虚拟化和I/O虚拟化提供了新的思路和方法,超级调用和事件通道是整个半虚拟化的基础。
下面我们来看看半虚拟化情况下整体的访问流程图,如图所示。

CPU半虚拟化技术
上图明确的显示了Hypercall的调用位置,在Xen中,各组件通信方式如下所示,Hypercall的调用性质是同步的。其他Xen的通信方式几乎都是异步的。

其中,在虚拟机和Xen的通信过程中,如果虚拟机需要调用敏感指令,会主动向虚拟机监控器发起Hypercall调用。Hypercall就如同传统操作系统下的系统调用,监管程序通过它向其上各虚拟机提供各种服务,如MMU 更新、Domain0 操作请求和虚拟处理器状态等。
下图显示了半虚拟化模式下的特权模式:

在x86架构下,原生系统和半虚拟化环境下存在差异。原生环境下,CPU有4个特权级(ring0--ring3),操作系统是处于最高级别的ring0,应用程序处于最低级别的ring3。而在半虚拟化环境下,虚拟机监视器是处于最高级别的ring0,操作系统是处于中级级别的ring1,应用程序处于最低级别的ring3。

只有特权级别为1 的代码(准虚拟化Guest VM 的内核)才能向Xen 发送Hypercall 请求,以防止应用程序(特权级3)的错误调用导致对系统可能的破坏。因此,只有运行在特权级1 的虚拟机操作系统内核才能申请Hypercall。但是,一些Xen 专用的特别程序,如xend 或xe也需要有Hypervisor 的服务来完成特殊的操作,如生成一个新的GuestVM 等,这在Xen Linux 中是通过一个称为privcmd 的内核驱动程序实现。应用程序通过ioctl 向该驱动程序提出服务请求,运行在虚拟机内核(特权级1)的privcmd 驱动程序再将服务请求以Hypercall 形式转向Hypervisor,并由后者真正完成生成新Guest VM 的动作。
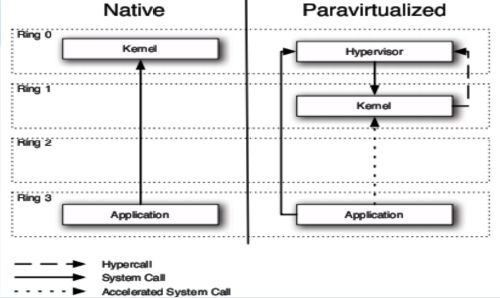
上图中显示了Hypercall所在的位置,Hypercall位于图中右上方,内核向Hypervisor发起调用的哪里。Xen启用130号中断向量端口(十六进制的82H)作为超级调用的中断号。这一个中断向量的DPL被设置为类型为1,类型为中断门。这样,超级调用能够由处于特权级1的客户机操作系统发起,而不能从用户态发起。
另外,在x86指令集的指令中,有17 条指令不能有效的在ring 1 特权级上运行,Hypercall 的存在解决了这些指令不能正常执行的问题。

Hypercall 机制中,在32 位x86 架构下,Hypercall 通过int0x82陷阱(Trap)指令实现,因为传统操作系统本身并不使用int0x82 (Linux 使用int 0x80 作为系统调用指令,int 0x82 并未使用)。
int0x82包括:
-
超级调用号:xen/include/public/xen.h中定义了45个超级调用,其中有7个是平台相关调用。
-
超级调用表:xen/arch/x86/x86_32/entry.S中定义了超级调用表,通过超级调用号索引就可以方便的找到对应的处理函数。
-
超级调用页:超级调用页是Xen为Guest OS准备的一个页,可以做到不同Guest OS有不同的超级调用页内容。
Hypercall 的具体功能识别号由eax 表明,而其他参数则在ebx, ecx, edx, esi 和edi 中。为了减少虚拟机和Hypervisor 之间的特权级别(Ring)切换次数,Xen 提供对Hypercall的批处理,即将几个Hypercall 功能请求放在一个列表中由专门的Hypercall 批处理请求完成。在Xen 中,系统调用表与Hypercall 表都在entry.S 文件中被定义。
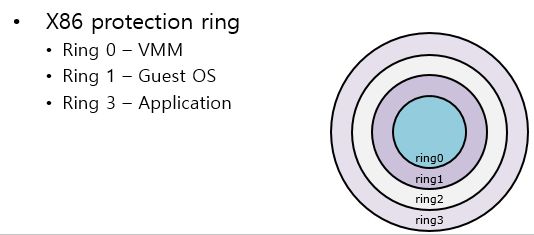
2、X86架构特权级
x86 硬件支持 4 个特权级 (Ring),一般内核运行在 Ring 0, 用户应用运行在 Ring 3, 更小的 Ring 有比更高的 Ring 能访问更多的系统全局资源,即更高的特权。有些指令只能在 Ring 0 才能正确执行,如 LGDT、LMSW 指令,我们称之为特权指令;另外有些指令可以在 Ring 3 正确执行,如 SGDT、 SMSW、PUSHF/POPF,我们称之为非特权指令。
正常模式和虚拟化两种情况叙述下,特权模式说明如下:
正常模式:特权级别是针对段来讲的,段描述符的最后两位标识了该段所位于的特权级别,比如,中断处理程序运行于ring0(),此时的内核程序是具有特权的,即ring0。位于ring3用户程序可以通过系统调用的方式,int80,后特权翻转入ring0,然后就可以顺利执行中断处理程序(好像是用户程序调用内核程序的唯一途径)。
虚拟化情况下:
特权解除:是指解除正常情况下运行于ring0的段,比如中断处理程序,为了虚拟化需要,此时解除其特权,将其运行于ring1。当用户程序通过系统调用时,其跳转到的中断处理程序运行于ring1。但是,在中断处理程序中,有部分指令是必须在ring0才能执行的,此时,便会自动陷入,然后模拟。也就是说,用户程序运行特权指令,会有两次特权下降,一次是通过系统调用进入ring1,第二次是通过特权指令陷入进入ring0。这说明,中断发生时的中断处理程序还是以前的位于内核的代码,但是其运行级别为ring1,部分指令还需要再次陷入,才能执行。另外,还有一个重要问题,就是部分敏感非特权指令无法陷入的问题:存在二进制翻译、超级调用等方式,强迫其陷入,然后模拟。
在传统的 X86 平台上支持虚拟化上存在如下问题 :
X86 指令集中存在 17 条敏感的非特权指令,“非特权指令”表明这些指令可以在 x86 的 ring 3 执行, 而“敏感性”说明 VMM 是不可以轻易让客操作系统执行这些指令的。 这 17 条指令在客操作系统上的执行或者会导致系统全局状态的破坏,如 POPF 指令,或者会导致客操作系统逻辑上的问题,如 SMSW 等读系统状态或控制寄存器的指令。传统的 X86 没法捕获这些敏感的非特权指令。
除了那 17 条敏感的非特权指令,其他敏感的指令都是敏感的特权指令。在 x86 虚拟化环境,VMM 需要对系统资源进行统一的控制,所以其必然要占据最高的特权级,即 Ring 0, 所以为了捕获特权指令,在传统 x86 上一个直接可行的方法是 “Ring deprivileging”, 如将客操作系统内核的特权级从 Ring 0改为 Ring 1 或 Ring 3, 即 “消除” 客内核的特权,以低于 VMM所在的 Ring 0, 从而让 VMM 捕获敏感的特权指令。
3、总结
半虚拟化的思想就是,让客户操作系统知道自己是在虚拟机上跑的,工作在非ring0状态,那么它原先在物理机上执行的一些特权指令,就会修改成其他方式,这种方式是可以和VMM约定好的,这就相当于,通过修改代码把操作系统移植到一种新的架构上来,就像是定制化。所以XEN这种半虚拟化技术,客户机操作系统都是有一个专门的定制内核版本,和x86、mips、arm这些内核版本。这样以来,就不会有捕获异常、翻译、模拟的过程了,性能损耗非常低。这就是XEN这种半虚拟化架构的优势。这也是为什么XEN半虚拟化只支持虚拟化Linux,无法虚拟化windows原因,微软不修改代码无法实现半虚拟化。
CPU纯软件全虚拟化技术
我们在前面的文章中提到了虚拟化技术的大致分类情况,即分为全虚拟化、半虚拟化和硬件辅助虚拟化3大类。而我们虚拟化技术最主要的虚拟主体就是我们的硬件CPU、内存和IO,那么我们的CPU在全虚拟化模式下如何工作,在半虚拟化下如何工作,在硬件辅助虚拟化模式下如何工作?或着说细分下来,我们又可以分为:
- CPU的全虚拟化技术、半虚拟化技术和硬件辅助虚拟化技术,
- 内存的全虚拟化技术、半虚拟化技术和硬件辅助虚拟化技术
- IO设备的全虚拟化技术、半虚拟化技术和硬件辅助虚拟化技术。
本次我们就来说说CPU的全虚拟化技术、半虚拟化技术和硬件辅助虚拟化技术。
不支持硬件辅助虚拟化技术的X86架构下的CPU有4个特权级(ring0~ring3),操作系统是处于最高级别的ring0,应用程序处于最低级别的ring3。
在这种架构下实现CPU的全虚拟化是极其困难的,为什么困难?
- 原先的OS运行在ring0层,拥有对所有硬件的全部特权级;
- 虚拟化之后将OS运行在ring1层,OS就没有权限执行一些特权指令,怎么保证这些特权指令执行;
- 在保证该OS虚拟机的特权指令执行的情况下,保证其他运行的OS虚拟机的安全;
1、模拟仿真技术
最先实现这种CPU全虚拟化技术的是Trap-and-emulation技术,即陷入模式和模拟仿真技术。这种技术通过将OS需求的特权指令通过VMM自动捕获的方式运行后返回去OS。当OS有特权指令产生时,VMM将其自动捕获,将OS所请求的特权指令进行截获,然后通过VMM运行之后将结果返回给OS层。VMM会使用模拟仿真将特权指令模拟仿真的方式执行一遍。

在虚拟化模式下,就存在着2中特殊的指令:特权指令和敏感指令。那么什么是特权指令?什么是敏感指令?
特权指令:系统中有一些操作和管理关键系统资源的指令,这些指令只有在最高特权级上能够正确运行。如果在非最高特权级上运行,特权指令会引发一个异常,处理器会陷入到最高特权级,交由系统软件处理了。
敏感指令:操作特权资源的指令,包括修改虚拟机的运行模式或者下面物理机的状态;读写时钟、中断等寄存器;访问存储保护系统、地址重定位系统及所有的I/O指令。
根据Popek和Goldberg的定义,指令集支持虚拟化的前提是:所有敏感指令都是特权指令。很可惜x86指令集不能满足这个要求。
虚拟化场景下,要求将GuestOS内核的特权解除,从原来的0降低到1或者3。这部分特权指令在Guest OS中发生的时候,就会产生Trap,被VMM捕获,从而由VMM完成。这就是虚拟的本质方法,特权解除和陷入模拟(Privilege deprivileging/Trap-and-Emulation)。虚拟化场景中敏感指令必须被VMM捕获并完成。对于一般 RISC 处理器,如 MIPS,PowerPC 以及SPARC,敏感指令肯定是特权指令,但是x86 例外,x86绝大多数的敏感指令是特权指令,但是由于部分敏感指令不是特权指令,执行这些指令的时候不会自动trap被VMM捕获。

2、二进制翻译技术
采用模拟仿真的方式模拟和虚拟化x86架构的CPU,但是由于x86架构的CPU中,不是所有的敏感指令都是特权指令,所以并不能完全的解决掉那些不是特权指令的敏感指令的模拟仿真问题。例如SGDT, SLDT, SIDT …
由于模拟仿真技术固有的缺陷,导致对CPU的虚拟化并不完整。所以也导致了基于x86的虚拟化难以和其他CPU架构一样实现虚拟化。比如IBM的Power CPU架构就很早具备了虚拟化的技术并使用于实践。
这个现象在1999年得到改善,VMware通过二进制翻译技术完成了对x86 CPU架构的完全虚拟化。
其主要采用优先级压缩技术(Ring Compression)和二进制代码翻译技术(Binary Translation)。优先级压缩技术让VMM和Guest运行在不同的特权级下。对x86架构而言,即VMM运行在最高特权级别Ring 0下,Guest OS运行在Ring 1下,用户应用运行在Ring 3下。因此,Guest OS的核心指令无法直接下达到计算机系统硬件执行,而是需要经过VMM的捕获和模拟执行(部分难以虚拟化的指令需要通过二进制翻译【Binary Translation】技术进行转换)。如下图所示。

特权级我想在这里就不用多说,大家都比较清楚,说说大家可能不清楚的二进制代码翻译技术。二进制翻译技术简称BT,是一种直接翻译可执行二进制程序的技术,能够把一种处理器上的二进制程序翻译到另外一种处理器上执行。二进制翻译技术将机器代码从源机器平台映射(翻译)至目标机器平台,包括指令语义与硬件资源的映射,使源机器平台上的代码“适应”目标平台。因此翻译后的代码更适应目标机器,具有更高的运行时效率。二进制翻译系统是位于应用程序和计算机硬件之间的一个软件层,它很好地降低了应用程序和底层硬件之间的耦合度,使得二者可以相对独立地发展和变化。二进制翻译也是一种编译技术,它与传统编译的差别在于其编译处理对象不同。传统编译处理的对象是某一种高级语言,经过编译处理生成某种机器的目标代码;二进制翻译处理的对象是某种机器的二进制代码,该二进制代码是通过传统编译过程生成的,经过二进制翻译处理后生成另一种机器的二进制代码。
根据不同的实现方式,二进制翻译技术可分为三大类:解释执行,静态翻译和动态翻译。
代码解释执行
解释执行(Interpretation)过程对源机器代码中的每条指令实时解释执行,系统不保存且不缓存解释过的指令,不需要用户干涉,也不进行任何优化。解释器相对容易开发,比较容易与老的体系结构高度兼容,但效率很差。
静态二进制翻译
在静态二进制翻译(SBT,Static BinaryTranslation)中,代码在运行之前被离线翻译,根据目标机器的指令结构生成一个新的程序,然后直接执行这个翻译后生成的程序。静态翻译器的离线翻译过程不会给程序运行带来额外开销,因此可以充分采用各种优化措施生产高质量代码,大大提高运行时效率。
动态二进制翻译
动态二进制翻译(DBT,Dynamic BinaryTranslation)则在程序运行时对执行到的代码片段进行翻译,克服了静态翻译所无法解决的一些困难,如运行时动态信息收集,代码挖掘,自修改代码和精确中断问题。而且动态翻译器对用户完全透明,无需用户干预。虽然动态翻译有上述诸多优点,翻译过程却由于受到动态执行的限制而不能像静态翻译那样进行完全细致的优化,使得翻译生成的代码效率比静态翻译器差。
三种二进制翻译技术的比较
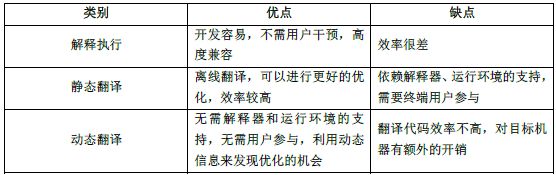
解释执行是最易实现的一种翻译技术,但是其繁琐的实现方式大大降低了翻译系统的执行效率。静态翻译虽然能提供高效的运行时性能,但由于无法在静态环境下覆盖所有代码,无法脱离对解释器的依赖。与上述两种相比,动态翻译很好的解决了代码覆盖、自修改代码和精确中断等诸多问题,同时也能提供可接受的执行效率。因此VMware基于动态二进制翻译技术实现了x86架构的CPU的虚拟化。
典型动态二进制翻译系统结构所示,被翻译的代码称为源机器代码,在宿主机上运行的代码称为目标机器代码,一个典型的动态二进制翻译器主要包括两个模块:翻译引擎和执行引擎。其中翻译器引擎负责将源机器代码翻译代码翻译成目标机器代码;执行引擎负责准备目标机器代码运行的上下文环境(Execution Context)然后从目标机器代码缓存中找到源机器代码对应的目标代码并执行。
其基本运行流程如下:
查找(Lookup)阶段
这个阶段查询目标代码块是否存在于目标代码缓存中,如果存在则返回目标块入口地址,如果不存在则进入翻译阶段。
上下文切换(Context Switch)阶段
当一个目标代码块被查询到或者翻译模块生成的时候,二进制翻译系统会执行一次控制权转移。系统会把控制权交给执行模块去运行该目标代码块,目标代码块运行完毕后系统需要恢复执行引擎的控制权。一次控制权转移需要保存程序的上下文环境。
翻译(Translation)阶段
完成从源机器二进制代码到目标机器二进制代码的翻译。包括解码、中间代码优化、编码三个子阶段。
执行和链接(Executing & Linking)阶段
当基本块被翻译生成目标代码块之后,依照源代码的控制流完成目标代码块之间的直接以及间接跳转的链接,并依次运行目标代码块。
3、总结
在没有CPU硬件辅助虚拟化技术之前,对于X86架构的CPU就采用模拟和二进制翻译的技术对CPU进行虚拟化实现,但是模拟的方式存在固有缺陷,并不完全虚拟化了x86的CPU架构。而二进制翻译技术则采用完全不同的思路实现了x86架构的CPU虚拟化。其实对于x86的CPU虚拟化,其难点就在于对其特权指令和敏感指令的虚拟化实现,当然,在实现了CPU的指令这一难题之后,还有一个难题在等着我们!那就是x86架构的CPU调度问题?
在虚拟化环境下,x86架构的CPU有什么调度问题?
1、 虚拟CPU和物理CPU之间的对应关系?
2、 虚拟CPU和物理CPU之间的资源分配?
3、 虚拟CPU和虚拟CPU之间的优先级?
4、 多核虚拟CPU架构vSMP和vNUMA与物理多核CPU架构SMP和NUMA之间的调度和负载均衡?