详解——导向滤波(Guided Filter)和快速导向滤波
文章目录
- 导读
- 原理推导
- 导向滤波的应用
- 导向滤波的实现
- 快速导向滤波的实现
- 算法效果
- 代码
- 参考
导读
在图像滤波算法中,导向滤波、双边滤波、最小二乘滤波并称三大保边滤波器,他们是各向异性滤波器。相对于常见的均值滤波、高斯滤波等各向同性滤波器,他们最大的特点是在去除噪声的同时,能最大限度保持边缘不被平滑。本文讲解导向滤波及其应用。
总的来讲,导向滤波就是尽可能让输出图像的梯度和导向图相似,同时让输出图像的灰度(亮度)与输入图像相似,以此来保留边缘并且滤除噪声。
原理推导
我们先看下图:

输入图像 p p p,经过引导图像 I I I, 滤波得到输出图像 q q q, 导向滤波算法中有一个重要假设:即在局部窗口 w k w_k wk上,导向图 I I I和输出图 q q q存在局部线性关系:
q i = a k I i + b k , ∀ i ∈ w k (1) q_i = a_kI_i + b_k, \forall{i\in{w_k}}\tag{1} qi=akIi+bk,∀i∈wk(1)
同时在窗口 w k w_k wk上, 滤波后的图像 q q q和输入图像 p p p有如下关系:
q i = p i − n i , ∀ i ∈ w k (2) q_i = p_i - n_i,\forall{i\in{w_k}}\tag{2} qi=pi−ni,∀i∈wk(2)
这样公式 ( 1 ) (1) (1)的线性关系保证了如果在每个局部窗口 w k w_k wk中,如果导向图 I I I中存在一个边缘,输出图像 q q q将保持边缘不变。同时,滤波结果图 q q q要尽可能与输入图像 p p p相同以此减小滤波带来的信息损失,该算法的最小二乘表示即:
a r g m i n ∑ i ∈ w k ( q i − p i ) 2 = a r g m i n ∑ i ∈ w k ( a k I i + b k − p i ) 2 argmin\sum_{i\in{w_k}}(q_i-p_i)^2 = argmin\sum_{i\in{w_k}}(a_kI_i+b_k-p_i)^2 argmini∈wk∑(qi−pi)2=argmini∈wk∑(akIi+bk−pi)2
这是求解最优值的问题,引入一个正则化参数 ϵ \epsilon ϵ防止 a k a_k ak过大,得到损失函数:
E ( a k , b k ) = ∑ i ∈ w k ( ( a k I i + b k − p i ) 2 + ϵ a k 2 ) (3) E(a_k,b_k)=\sum_{i\in{w_k}}((a_kI_i+b_k-p_i)^2+\epsilon{a_k^2})\tag{3} E(ak,bk)=i∈wk∑((akIi+bk−pi)2+ϵak2)(3)
运用最小二乘法求解极小值,利用极小值处导数为0,求解过程如下:
δ E a k = ∑ i ∈ w k ( 2 ( a k I i + b k − p i ) I i + 2 ϵ a k ) = 0 ⇒ ∑ i ∈ w k ( a k I i 2 + b k I i − p i I i + ϵ a k ) = 0 δ E b k = ∑ i ∈ w k 2 ( a k I i + b k − p i ) = 0 ⇒ a k ∑ i ∈ w k I i − ∑ i ∈ w k p i + ∑ i ∈ w k b k = 0 ⇒ ∣ w ∣ b k = ∑ i ∈ w k p i − a k ∑ i ∈ w k I i \begin{aligned} \frac{\delta{E}}{a_k} &= \sum_{i\in{w_k}}(2(a_kI_i+b_k-p_i)I_i+2\epsilon{a_k}) = 0 \\ & \Rightarrow \sum_{i\in{w_k}}(a_kI_i^2+b_kI_i-p_iI_i+\epsilon{a_k}) = 0 \\ \frac{\delta{E}}{b_k} & = \sum_{i\in{w_k}}2(a_kI_i+b_k-p_i)= 0 \\ & \Rightarrow a_k\sum_{i\in{w_k}}{I_i}-\sum_{i\in{w_k}}{p_i}+\sum_{i\in{w_k}}{b_k} = 0 \\ & \Rightarrow |w|b_k = \sum_{i\in{w_k}}{p_i}-a_k\sum_{i\in{w_k}}{I_i} \end{aligned} akδEbkδE=i∈wk∑(2(akIi+bk−pi)Ii+2ϵak)=0⇒i∈wk∑(akIi2+bkIi−piIi+ϵak)=0=i∈wk∑2(akIi+bk−pi)=0⇒aki∈wk∑Ii−i∈wk∑pi+i∈wk∑bk=0⇒∣w∣bk=i∈wk∑pi−aki∈wk∑Ii
由上面推到得出:
a k = ∑ i ∈ w k p i I i − b k ∑ i ∈ w k I i ∑ i ∈ w k ( I i 2 + ϵ ) b k = ∑ i ∈ w k p i − a k ∑ i ∈ w k I i ∣ w ∣ = p ‾ k − a k μ k (4) \begin{aligned} a_k &= \frac{\sum_{i\in{w_k}}p_iI_i-b_k\sum_{i\in{w_k}}I_i}{\sum_{i\in{w_k}}(I_i^2+\epsilon)} \\ b_k &= \frac{\sum_{i\in{w_k}}{p_i}-a_k\sum_{i\in{w_k}}{I_i}}{|w|} \\ & = \overline{p}_k - a_k\mu_k \tag{4} \end{aligned} akbk=∑i∈wk(Ii2+ϵ)∑i∈wkpiIi−bk∑i∈wkIi=∣w∣∑i∈wkpi−ak∑i∈wkIi=pk−akμk(4)
其中: μ k — — 窗 口 w k 范 围 内 引 导 图 I 的 均 值 ; p ‾ k — — 窗 口 w k 范 围 内 输 入 图 p 的 均 值 。 \begin{aligned} & \mu_k——窗口w_k范围内引导图I的均值;\\ & \overline{p}_k——窗口w_k范围内输入图p的均值。 \end{aligned} μk——窗口wk范围内引导图I的均值;pk——窗口wk范围内输入图p的均值。
将 b k b_k bk代入 a k a_k ak计算可得:
a k = ∑ i ∈ w k p i I i − b k ∑ i ∈ w k I i ∑ i ∈ w k ( I i 2 + ϵ ) a_k = \frac{\sum_{i\in{w_k}}p_iI_i-b_k\sum_{i\in{w_k}}I_i}{\sum_{i\in{w_k}}(I_i^2+\epsilon)} ak=∑i∈wk(Ii2+ϵ)∑i∈wkpiIi−bk∑i∈wkIi
⇒ a k = ∑ i ∈ w k ( p i I i − p ‾ k I i ) ∑ i ∈ w k ( I i 2 + μ k I i + ϵ ) \Rightarrow a_k = \frac{\sum_{i\in{w_k}}(p_iI_i-\overline{p}_kI_i)}{\sum_{i\in{w_k}}(I_i^2+\mu_kI_i+\epsilon)} ⇒ak=∑i∈wk(Ii2+μkIi+ϵ)∑i∈wk(piIi−pkIi)
⇒ a k = ∑ i ∈ w k ( p i I i − p ‾ k I i + μ k p i − μ k p ‾ k ) ∑ i ∈ w k ( I i 2 − μ k I i − μ k I i + μ k 2 + ϵ ) \Rightarrow a_k = \frac{\sum_{i\in{w_k}}(p_iI_i-\overline{p}_kI_i {\color{red}{+\mu_kp_i-\mu_k\overline{p}_k}})}{\sum_{i\in{w_k}}(I_i^2-\mu_kI_i{\color{red}{-\mu_kI_i+\mu_k^2}}+\epsilon)} ⇒ak=∑i∈wk(Ii2−μkIi−μkIi+μk2+ϵ)∑i∈wk(piIi−pkIi+μkpi−μkpk)
上下两边同除以 ∣ w ∣ |w| ∣w∣, ∣ w ∣ |w| ∣w∣为窗口 w k w_k wk像素数量。得到:
a k = 1 ∣ w ∣ ∑ i ∈ w k p i I i − p ‾ k μ k + μ k p ‾ k − μ k p ‾ k ∑ i ∈ w k ( I i − μ k ) 2 + ϵ a_k = \frac{\frac{1}{|w|}\sum_{i\in{w_k}}p_iI_i-\overline{p}_k\mu_k{\color{red}{+\mu_k\overline{p}_k-\mu_k\overline{p}_k}}}{\sum_{i\in{w_k}}(I_i-\mu_k)^2+\epsilon} ak=∑i∈wk(Ii−μk)2+ϵ∣w∣1∑i∈wkpiIi−pkμk+μkpk−μkpk
最后:
a k = 1 ∣ w ∣ ∑ i ∈ w k p i I i − μ k p ‾ k σ k 2 + ϵ (5) \color{red}{a_k = \frac{\frac{1}{|w|}\sum_{i\in{w_k}}p_iI_i{ - \mu_k\overline{p}_k}}{\sigma_k^2+\epsilon}} \tag{5} ak=σk2+ϵ∣w∣1∑i∈wkpiIi−μkpk(5)
b k = p ‾ k + a k μ k (6) \color{red}{b_k = \overline{p}_k+a_k\mu_k} \tag{6} bk=pk+akμk(6)
得到上述公式后,可以对每个窗口 w k w_k wk计算一个 ( a k , b k ) (a_k,b_k) (ak,bk),但是,每个像素都被包含在多个窗口中,对每个像素,都能计算出多个 ( a k , b k ) (a_k,b_k) (ak,bk),我么将使用多个 ( a k , b k ) (a_k,b_k) (ak,bk)计算得到的 q i q_i qi值求平均得到输出 q i q_i qi值,上述过程描述如下:
q i = 1 w k ∑ k , i ∈ w k ( a k I i + b k ) = a ‾ i I i + b ‾ i \begin{aligned} q_i &= \frac{1}{w_k}\sum_{k,i\in{w_k}}(a_kI_i+b_k) \\ & = \overline{a}_iI_i+\overline{b}_i \end{aligned} qi=wk1k,i∈wk∑(akIi+bk)=aiIi+bi
其中: a ‾ i — — 窗 口 w k 范 围 内 所 有 像 素 计 算 得 到 的 a k 的 均 值 ; b ‾ i — — 窗 口 w k 范 围 内 所 有 像 素 计 算 得 到 的 b k 的 均 值 。 \begin{aligned} & \overline{a}_i——窗口w_k范围内所有像素计算得到的a_k的均值;\\ & \overline{b}_i——窗口w_k范围内所有像素计算得到的b_k的均值。 \end{aligned} ai——窗口wk范围内所有像素计算得到的ak的均值;bi——窗口wk范围内所有像素计算得到的bk的均值。
导向滤波的应用
- 保边滤波
当 I = p I=p I=p时,该算法成为一个保边滤波器。上述 ( a k , b k ) (a_k,b_k) (ak,bk)计算公式变化为:
a k = σ k 2 σ k 2 + ϵ b k = ( 1 − a k ) p ‾ k a_k = \frac{\sigma_k^2}{\sigma_k^2+\epsilon} \\ b_k = (1-a_k)\overline{p}_k ak=σk2+ϵσk2bk=(1−ak)pk
考虑以下两种情况:- Case 1:平坦区域。如果在某个滤波窗口内,该区域是相对平滑的,方差 σ k 2 \sigma_k^2 σk2将远远小于 ϵ \epsilon ϵ。从而 a k ≈ 0 , b k ≈ p ‾ k a_k≈0,b_k≈\overline{p}_k ak≈0,bk≈pk。相当于对该区域作均值滤波。
- Case 2:高方差区域。相反,如果该区域是边缘区域,方差很大, σ k 2 \sigma_k^2 σk2将远远大于 ϵ \epsilon ϵ。从而 a k ≈ 1 , b k ≈ 0 a_k≈1,b_k≈0 ak≈1,bk≈0。相当于在区域保持原有梯度。
以上可以出: ϵ \epsilon ϵ为界定平滑区域和边缘区域的阈值。
- 图像去雾
在图像去雾中,导向滤波一般用来细化透射率图像,以原图的灰度图为导向图,以粗投射率图为输入图,能得到非常精细的透射率图像。
当然,导向滤波的应用不止以上两种,网上还有图像融合等应用,本人没有去了解。
导向滤波的实现
导向滤波的代码实现较为简单,我们直接贴出计算流程
快速导向滤波的实现
由于导向滤波效率问题,何凯明博士在2015年,对其做了优化,基本原理是将导向图,输入图都进行下采样计算 ( a k , b k ) (a_k,b_k) (ak,bk),然后对 ( a k , b k ) (a_k,b_k) (ak,bk)进行上采样恢复原始大小,整个算法流程如下: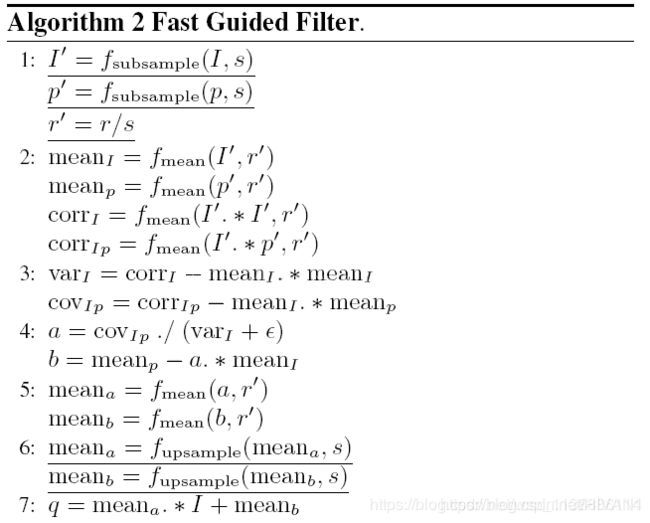
算法效果
我们演示一下保边滤波效果:
代码
接下来,废话不多说,我们上代码:https://github.com/ZPEthanWen/ImageAlgorithmDraft,为防止github无法访问,我们直接贴上代码:
- 导向滤波
#include
//导向滤波
void GuidedFilter(cv::Mat& srcImage, cv::Mat& guidedImage, cv::Mat& outputImage, int filterSize, double eps)
{
try
{
if (srcImage.empty() || guidedImage.empty() || filterSize <= 0 || eps < 0 ||
srcImage.channels() != 1 || guidedImage.channels() != 1)
{
throw "params input error";
}
cv::Mat srcImageP, srcImageI, meanP, meanI, meanIP, meanII, varII, alfa, beta;
srcImage.convertTo(srcImageP, CV_32FC1);
guidedImage.convertTo(srcImageI, CV_32FC1);
cv::boxFilter(srcImageP, meanP, CV_32FC1, cv::Size(filterSize, filterSize));
cv::boxFilter(srcImageI, meanI, CV_32FC1, cv::Size(filterSize, filterSize));
cv::boxFilter(srcImageI.mul(srcImageP), meanIP, CV_32FC1, cv::Size(filterSize, filterSize));
cv::boxFilter(srcImageI.mul(srcImageI), meanII, CV_32FC1, cv::Size(filterSize, filterSize));
varII = meanII - meanI.mul(meanI);
alfa = (meanIP - meanI.mul(meanP)) / (varII + eps);
beta = meanP - alfa.mul(meanI);
cv::boxFilter(alfa, alfa, CV_32FC1, cv::Size(filterSize, filterSize));
cv::boxFilter(beta, beta, CV_32FC1, cv::Size(filterSize, filterSize));
outputImage = (alfa.mul(srcImageI) + beta);
}
catch (cv::Exception& e)
{
throw e;
}
catch (std::exception& e)
{
throw e;
}
}
- 快速导向滤波
#include
//快速导向滤波
void FastGuidedFilter(cv::Mat& srcImage, cv::Mat& guidedImage, cv::Mat& outputImage, int filterSize, double eps, int samplingRate)
{
try
{
if (srcImage.empty() || guidedImage.empty() || filterSize <= 0 || eps < 0 ||
srcImage.channels() != 1 || guidedImage.channels() != 1 || samplingRate < 1)
{
throw "params input error";
}
cv::Mat srcImageP, srcImageSubI, srcImageI, meanP, meanI, meanIP, meanII, var, alfa, beta;
cv::resize(srcImage, srcImageP, cv::Size(srcImage.cols / samplingRate, srcImage.rows / samplingRate));
cv::resize(guidedImage, srcImageSubI, cv::Size(srcImage.cols / samplingRate, srcImage.rows / samplingRate));
filterSize = filterSize / samplingRate;
srcImageP.convertTo(srcImageP, CV_32FC1);
guidedImage.convertTo(srcImageI, CV_32FC1);
srcImageSubI.convertTo(srcImageSubI, CV_32FC1);
cv::boxFilter(srcImageP, meanP, CV_32FC1, cv::Size(filterSize, filterSize));
cv::boxFilter(srcImageSubI, meanI, CV_32FC1, cv::Size(filterSize, filterSize));
cv::boxFilter(srcImageSubI.mul(srcImageP), meanIP, CV_32FC1, cv::Size(filterSize, filterSize));
cv::boxFilter(srcImageSubI.mul(srcImageSubI), meanII, CV_32FC1, cv::Size(filterSize, filterSize));
var = meanII - meanI.mul(meanI);
alfa = (meanIP - meanI.mul(meanP)) / (var + eps);
beta = meanP - alfa.mul(meanI);
cv::boxFilter(alfa, alfa, CV_32FC1, cv::Size(filterSize, filterSize));
cv::boxFilter(beta, beta, CV_32FC1, cv::Size(filterSize, filterSize));
cv::resize(alfa, alfa, cv::Size(srcImage.cols, srcImage.rows));
cv::resize(beta, beta, cv::Size(srcImage.cols, srcImage.rows));
outputImage = alfa.mul(srcImageI) + beta;
}
catch (cv::Exception& e)
{
throw e;
}
catch (std::exception& e)
{
throw e;
}
}
参考
[1] 视觉一只白 .《导向滤波的原理及实现》[DB/OL].
[2] lsflll.《导向滤波(Guided Filter)公式详解》[DB/OL]
[3] SongpingWang.《OpenCV—Python 导向滤波》[DB/OL]